Билеты по строит. машинам. Управления машин Нарисовать схему и охарактеризовать назначение каждого узла
 Скачать 3.6 Mb. Скачать 3.6 Mb.
|

|
Подшипники качения состоят из двух колец, тел качения (различной формы) и сепаратора (некоторые типы подшипников могут быть без сепаратора), отделяющего тела качения друг от друга, удерживающего на равном расстоянии и направляющего их движение. По наружной поверхности внутреннего кольца и внутренней поверхности наружного кольца (на торцевых поверхностях колец упорных подшипников качения) выполняют желоба — дорожки качения, по которым при работе подшипника катятся тела качения. 2-х рядный роликовый подшипник: При выборе типа и размеров подшипника качения необходимо учитывать:  1) величину и направление нагрузки; 2) характер нагрузки (постоянная, переменная, ударная); 3) число оборотов подшипника; 4) требуемый срок службы (долговечность) подшипника; 5) требования, предъявляемые к подшипнику конструкцией узла. На основании этих требований выбирают необходимый тип подшипника, а затем определяют коэффициент работоспособности С по формуле С = Q(nh)0,3 где Q — условная радиальная нагрузка на подшипник в кг; n — число оборотов подшипника в минуту; h — долговечность подшипника в час. Величина (nh)0,3 находится по табл 40. Какие силы, действуют на рабочие органы землеройных машин при их взаимодействии с грунтом? Как их рассчитать? Рабочие органы землеройно-транспортных машин в основном служат для вырезания грунта и отделения его от основного массива. Они часто выполняют также операции перемещения грунта либо перед собой, либо в сторону, а в случае транспортирования грунта на большие расстояния они выполняются в виде ковшей. В зависимости от назначения машин рабочие органы землеройно-транспортных машин могут выполняться в виде прямого (рис. 4, б) или дискового (рис. 4, в) ножей, которые отделяют грунт от основного массива и подают его на отвальную поверхность, в ковш или на транспортер; ковша (рис. 4, г и д), режущая кромка которого может быть снабжена зубьями, которые разрушают грунт, что облегчает врезание в него самой режущей кромки; зуба или зубьев (рис. 4, а), которые здесь являются самостоятельными рабочими органами и служат для рыхления грунта. Прямой нож часто выполняется вместе с отвалом, который служит как бы его продолжением. В этом случае вырезанный грунт движется либо вдоль отвала, либо впереди него. Зубья могут применяться в виде самостоятельного рабочего органа, как это, например, имеет место у рыхлителя или кирковщика, или же ими могут оснащаться ножи и ковши. Сопротивление копанию зависит от углов, которые образуются рабочими органами машин с поверхностью грунта. При этом различают: угол резания S, угол заострения (J и задний угол а (рис. 4). От правильного выбора этих углов и особенно угла резания зависит эффективность работы землеройных машин. Численные значения этих углов выбираются применительно к каждому виду землеройных машин. Прямые ножи (рис. 5, а) характеризуются еще центральным углом со, углом опрокидывания чр и углом установки его в плане <р (рис. 5, б), который еще называется углом захвата или углом атаки. На взаимодействующий с грунтом рабочий орган (рис. 2, б) действует сила сопротивления его движению в грунте F0, раскладываемая на две составляющие - касательную F01 и нормальную F02 к траектории движения рабочего органа. Силу F01 (кН) можно представить в виде F01 = Fр + Fт + Fп.в., где Fр - сопротивление грунта резанию, кН; Fт - сопротивление трения рабочего органа о грунт, кН; Fп.в. - сопротивление перемещению призмы волочения грунта в рабочем органе, кН. Сопротивление грунта резанию представляет собой сопротивление внедрению передней грани рабочего органа в грунт в направлении главного движения. Величина Fр зависит от поперечного сечения срезаемой стружки, физико-механических свойств грунта и геометрии режущей части рабочего органа: Fp = Rplc, Где Fp - удельное сопротивление грунта резанию, кПа; l и с - ширина и толщина стружки, м. 41. Как устроена гидравлическая насосная система управления машин ? Нарисовать схему и охарактеризовать назначение каждого узла. Гидравлический привод (гидропривод) — совокупность устройств, предназначенных для приведения в движение машин и механизмов посредством гидравлической энергии. Гидропривод представляет собой своего рода «гидравлическую вставку» между приводным двигателем и нагрузкой (машиной или механизмом) и выполняет те же функции, что и механическая передача (редуктор, ремённая передача, кривошипно-шатунный механизм и т. д.). По источнику подачи рабочей жидкости - Насосный гидропривод. В насосном гидроприводе, получившем наибольшее распространение в технике, механическая энергия преобразуется насосом в гидравлическую, носитель энергии — рабочая жидкость, нагнетается через напорную магистраль к гидродвигателю, где энергия потока жидкости преобразуется в механическую. Рабочая жидкость, отдав свою энергию гидродвигателю, возвращается либо обратно к насосу (замкнутая схема гидропривода), либо в бак (разомкнутая или открытая схема гидропривода). В общем случае в состав насосного гидропривода входят гидропередача, гидроаппараты, кондиционеры рабочей жидкости, гидроёмкости и гидролинии. Наибольшее применение в гидроприводе получили аксиально-поршневые, радиально-поршневые, пластинчатые и шестерённые насосы. Принцип работы объемного гидропривода основан на законе Паскаля, по которому всякое изменение давления в какой-либо точке покоящейся жидкости, не нарушающее ее равновесия, передается в остальные ее точки без изменения (рис.1.2). Насосом 1 рабочая жидкость подается в напорную гидролинию 3 и далее через распределитель 5 к гидродвигателю 2. При одном положении гидрораспределителя совершается рабочий ход гидродвигателя, а при другом положении - холостой. Из гидродвигателя жидкость через распределитель поступает в сливную гидролинию и далее или в гидробак 9, или во всасывающую гидролинию насоса (в гидроприводах с замкнутой схемой циркуляции рабочей жидкости, см. рис.1.2, а). В резервуаре жидкость охлаждается и снова поступает в гидросистему. Надежная работа гидропривода возможна только при соответствующей очистке рабочей жидкости фильтрами 8. Регулирование скорости движения выходного звена гидродвигателя может быть дроссельным или объемным. При дроссельном регулировании в гидросистеме устанавливаются нерегулируемые насосы, а изменение скорости движения выходного звена достигается изменением расхода рабочей жидкости через дроссель 6. При объемном регулировании скорость движения выходного звена гидродвигателя изменяется подачей регулируемого насоса либо за счет применения регулируемого гидромотора.  Защита гидросистемы от чрезмерного повышения давления обеспечивается предохранительным 4а или переливным 4б клапанами, которые настраиваются на максимально допустимое давление. Если нагрузка на гидродвигатель возрастает сверх установленной, то весь поток рабочей жидкости будет идти через предохранительный или переливной клапаны, минуя гидродвигатель. Контроль за давлением на отдельных участках гидросистемы осуществляется по манометрам 11. 43. Чем отличаются подшипники скольжения от подшипников качения ? Как устроен подшипник скольжения ? Подшипники качения состоят из двух колец, тел качения (различной формы) и сепаратора (некоторые типы подшипников могут быть без сепаратора), отделяющего тела качения друг от друга, удерживающего на равном расстоянии и направляющего их движение. По наружной поверхности внутреннего кольца и внутренней поверхности наружного кольца (на торцевых поверхностях колец упорных подшипников качения) выполняют желоба — дорожки качения, по которым при работе подшипника катятся тела качения. Подшипник скольжения — опора или направляющая механизма или машины, в которой трение происходит при скольжении сопряжённых поверхностей. Радиальный подшипник скольжения представляет собой корпус, имеющий цилиндрическое отверстие, в которое вставляется рабочий элемент — вкладыш, или втулка из антифрикционного материала и смазывающее устройство. Между валом и отверстием втулки подшипника имеется зазор, заполненный смазочным материалом, который позволяет свободно вращаться валу. Расчёт зазора подшипника, работающего в режиме разделения поверхностей трения смазочным слоем, производится на основе гидродинамической теории смазки. Смазка является одним из основных условий надёжной работы подшипника и обеспечивает: низкое трение, разделение подвижных частей, теплоотвод, защиту от вредного воздействия окружающей среды. 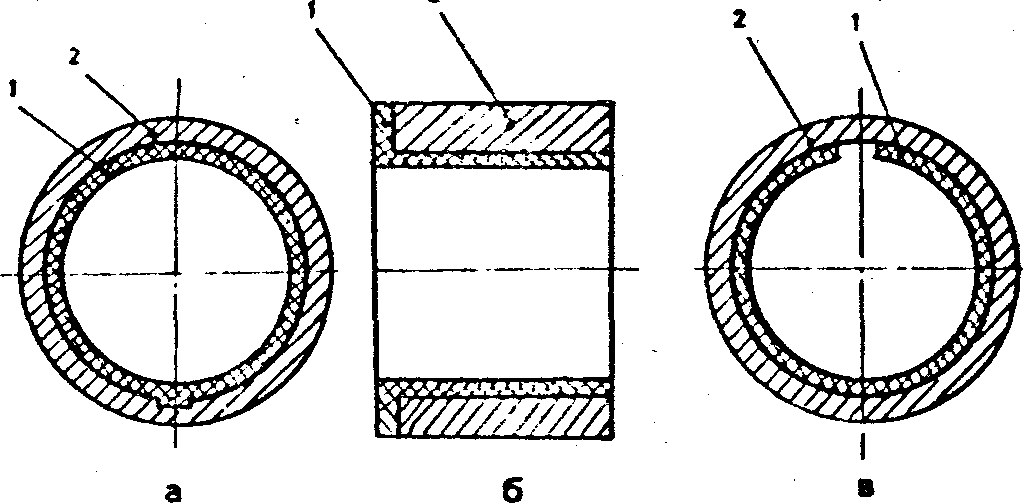 44. Устойчивость строительных машин против опрокидывания .Как определить угол устойчивости машины. Какие меры предпринимаются для повышения устойчивости машин ? Одной из достаточно частых причин несчастных случаев при эксплуатации грузоподъемных, колесных и гусеничных строительных машин является потеря ими устойчивости — опрокидывание. Опрокидывание машин обычно происходит вследствие ряда неблагоприятных эксплуатационных факторов: → увеличение поднимаемого груза до недопустимого веса, → подъем примерзших к земле конструкций, → значительные динамические нагрузки при неправильной эксплуатации, → большая ветровая нагрузка, → сверхнормативный наклон местности, → просадка грунта и др. Для обеспечения надежной и безопасной работы кран должен обладать устойчивостью против опрокидывания, т. е. способностью противодействовать опрокидывающим кран нагрузкам. Обязательным условием сохранения устойчивости крана является превышение или равенство удерживающего момента сумме опрокидывающих. Расчет устойчивости производится для следующих случаев: при работе крана с грузом, нерабочего состояния (собственная устойчивость, внезапного снятия нагрузки с крюка (обрыв груза), монтажа (демонтажа) крана. В соответствии с ГОСТ 13994—75 «Краны башенные строительные. Нормы расчета» устойчивость проверяют по следующим формулам: грузовая устойчивость ксМ0 + М% + Мл – 0,95Му, собственная устойчивость Мн ^ 0,95Л1У, при внезапном снятии нагрузки 0,ЗМо + МР <; 0,95Му, при монтаже (демонтаже) крана кМп – 0,95Л1Н, где Л10, Мд, Мр, MUH —опрокидывающие моменты относительно ребра опрокидывания соответственно от силы тяжести груза, динамических нагрузок и от ветровой нагрузки в рабочем.и нерабочем состоянии крана: кг — коэффициент, учитывающий режим работы, грузоподъемность и условия работы крана; Му — удерживающий момент относительно ребра опрокидывания от силы тяжести крана; к — коэффициент перегрузки; Мп, Мн — соответственно опрокидывающий момент от поднимаемых частей крана и удерживающий от неподвижных частей крана. Для обеспечения устойчивости башенных кранов при эксплуатации проводят следующие мероприятия: не допускают подъем грузов больше нормативных; выбирают нормативную высоту подъема груза и вылета стрелы; правильно устраивают балластную призму подкранового пути;не допускают работы людей в опасной зоне и надежно ограждают ее. В качестве количественных показателей устойчивости приняты:
45. Каково назначение трансмиссии машин? Из каких элементов они состоят? Определение КПД. Трансмиссия представляет собой систему механизмов для пере дачи энергии от двигателя к исполнительным органам машины с из менением скоростей, крутящих моментов, направления и вида дви жения. В зависимости от способа передачи энергии их делят на механические, электрические, гидравлические и пневматические. В рассматриваемых ниже механических передачах наиболее распро страненными являются передачи вращательного движения, одни из которых используют трение (фрикционные и ременные), а другие — зацепление (зубчатые, червячные, цепные и винтовые). В каждой пе редаче вал, передающий мощность, называется ведущим (входным), а воспринимающий ее — ведомым (выходным). Основными параметрами передач являются мощность на веду щем P1 и на ведомом Р2валах (в Вт), а также быстроходность, ха рактеризующаяся угловой скоростью w1или частотой вращения ве дущего п1и ведомого w2и n2валов (в рад/с и с-1), где w = πn/30. Так как при передаче мощности от ведущего вала к ведомому происхо дят ее потери на трение в движущихся частях, то Р1>Р2 . Величина этих потерь характеризуется КПД передачи η = Р2/Р1 < 1. Общий КПД системы передач определяется как произведение КПД отдельных передач: η общ = η1 η2 η3…ηn Передачи могут выполняться с постоянным и переменным (регу лируемым) передаточным числом и, определяемым как соотношение частот вращения одного вала к другому. Различают понижающие (редукторные) передачи, у которых и>1и n1>n2и повышающие (мультипликаторные), у которых и<1и n1<n2_. В строительных ма шинах преимущественное распространение получили понижающие передачи, у которых: и = n1/n2. 46. Устойчивость и принцип работы ленточного транспортера. Как рассчитать его производительность ? 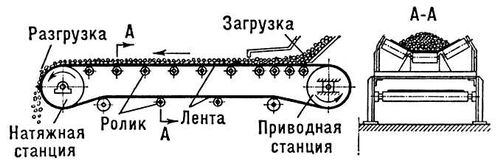 Ленточный конвейер — транспортирующее устройство непрерывного действия с рабочим органом в виде ленты. Основные элементы конструкции
Ленточный конвейер является наиболее распространённым типом транспортирующих машин, он служит для перемещения насыпных или штучных грузов. Применяется на промышленных производствах, в рудниках и шахтах, в сельском хозяйстве. Груз перемещается по ленте в горизонтальной плоскости или под углом до 30° к горизонту. Несущим и тяговым органом ленточного конвейера общего назначения является бесконечная гибкая лента, опирающаяся своими рабочей и холостой ветвями на роликовые опоры и огибающая на концах конвейера приводной и натяжной барабаны. У коротких конвейеров, предназначенных для штучных грузов, рабочая ветвь ленты может скользить по деревянному или металлическому настилу. Передача движения ленте осуществляется фрикционным способом от приводного барабана. Необходимое первоначальное натяжение на сбегающей ветви ленты создается натяжным барабаном при помощи натяжного устройства , которое в основном выполняют грузовым. Ленты загружают сыпучим материалом через загрузочную воронку, устанавливаемую обычно в начале конвейера у концевого барабана. Разгрузка ленты может быть концевой с приводного барабана или промежуточной, для чего используют передвижную разгрузочную тележку или стационарные плужковые сбрасыватели. Направление потока, сбрасываемого с барабана материала, обеспечивается разгрузочной коробкой. Для очистки ленты с рабочей стороны от оставшихся частиц устанавливают вращающиеся щетки (капроновые, резиновые) или неподвижный скребок. Для многих транспортируемых материалов установка очистного устройства является необходимой, так как прилипшие частицы, образуя на роликах холостой ветви трудноудаляемую неровную корку, могут привести к неравномерному их вращению и ускоренному износу ленты. Хорошо очищает ленту вращающийся барабан со спиральными скребками. Для сбрасывания случайно попавших на внутреннюю поверхность холостой ветви ленты частиц перед натяжным барабаном рекомендуется устанавливать дополнительный сбрасывающий скребок. Очистка ленты после приводного барабана необходима еще и потому, что прилипшие частицы, осыпаясь от встряхивания под каждой опорой холостой ветви, могут образовывать завалы, усложняющие эксплуатацию конвейера. Для центрирования обеих ветвей ленты и исключения ее чрезмерного поперечного смещения применяют различные центрирующие роликовые опоры. Привод барабана ленточного конвейера состоит из электродвигателя, редуктора и соединительных муфт. На поворотных участках ветвей трассы устанавливают роликовые батареи, обеспечивающие плавный перегиб ленты, или поворотные барабаны. Все элементы конвейера монтируют на металлоконструкции, прикрепляемой к фундаменту или к несущим частям здания. Металлоконструкции с приводным барабаном, приводом и разгрузочной коробкой называют приводной станцией. Элементы конструкции с натяжным устройством составляют натяжную станцию. Все остальное относится к средней части конвейера, которая выполнена из одинаковых линейных секций. Все линейные секции, переходные участки, приводная и натяжная станции соединены болтами. Как правило, для сыпучих грузов применяют многороликовые опоры, образующие желобчатую ленту. Такая форма ленты при одинаковой ширине и скорости позволяет получить более чем двукратное увеличение производительности. Двухбарабанные сбрасывающие тележки предназначены для промежуточной разгрузки только сыпучих материалов в стороны от ленты по одному из отводящих патрубков. Стационарные плужковые сбрасыватели можно использовать как для сыпучих, так и штучных грузов. Известны конструкции передвижных на тележках плужковых сбрасывателей. Помимо указанных выше элементов, конвейеры оборудуют стопорными устройствами или двухколодочными нормально закрытыми тормозами, а также размещенными на наклонных участках трассы ловителями ленты на случай ее обрыва, приспособлениями безопасности и автоматическими устройствами управления. Производительность ленточного конвейера определяется следующими факторами, которые необходимо учитывать при выборе оборудования: 1. Шириной транспортной ленты 2. Скоростью движения транспортной ленты 3. Типом транспортной ленты 4. Родом перемещаемого материала 5. Влажностью перемещаемого материала 6. Углом наклона ленточного конвейера |