Шпоры по ВМ. Вопрос 10. Вопросы приближения функций. Постановка задачи. Многочлен Ньютона с распределяющими разностями. 8
 Скачать 1.12 Mb. Скачать 1.12 Mb.
|

|
ВОПРОС №17. Численное интегрирование и дифференцирование. Численное интегрирование. В 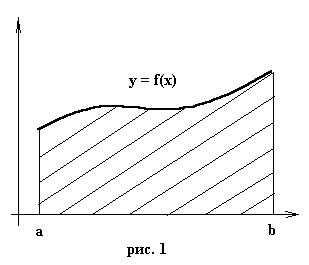 прикладных исследованиях часто возникает необходимость вычисления значения определенного интеграла прикладных исследованиях часто возникает необходимость вычисления значения определенного интеграла  Он может выражать площадь, объем, работу переменной силы и т.д. Если функция f(x) непрерывна на отрезке [a;b] и ее можно выразить через известные функции, то для вычисления интеграла (1) можно воспользоваться формулой Ньютона- Лейбница:  Однако в действительности очень часто получить решение (1) с помощью формулы (2) или других аналитических методов невозможно. Примером может служить широко применяемый для исследования процессов теплообмена и диффузии, в статистической физике и теории вероятностей интеграл:  значение, которого не может быть выражено в виде конечной комбинации элементарных функций. Помимо этого вычисления интеграла (1) в аналитической форме могут быть длительным и трудоемким процессом, приводящим к приближенному результату, или не дающими такового совсем. На практике помимо аналитических методов широко применяются специальные численные методы. Наиболее широко применяются квадратурные формулы вида:  Аi – числовые коэф., называемые весами квадратной формулы. Выведем простейшие квадратурные формулы, исходя из геометрических соображений. Известно, что интеграл (1) - площадь криволинейной трапеции, ограниченная сверху функцией f(x) (рис.1). Разобьем отрезок [a;b] на элементарные отрезки [xi-1,xi ] точками При этом интеграл будет представлять сумму своих составляющих.  Будем считать шаг h = xi - x i-1 постоянным и введем обозначения fi = f (xi), fi-1/2 = f (xi-1/2), где xi-1/2 = (xi-1/2 + xi) / 2 - середина элементарного отрезка. Численное дифференцирование. Во многих задачах решение включает необходимость вычисления производных. Если функциональная зависимость f(x) имеет простой вид, то в вычислительных алгоритмах можно использовать явный вид производной f `(x) для определения ее числовых значений. Однако, в реальных ситуациях, функция f(x) может быть представлена математической моделью или конечным множеством точек (xi; fi(x)). В этом случае отсутствует возможность пользоваться аналитическим выражением производной. Вспомним определение производной: можно использовать приближенное числовое значение: Вторую производную в точке xi можно рассчитать по этой же формуле: и так далее. Данные формулы дают достаточно высокую точность при задании h→0 Выходом в данной ситуации может быть использование алгоритмов интерполяции. ВОПРОС №18. Общая постановка задачи Коши. Метод Эйлера для её решения. Численное решение задачи Коши. При рассмотрении технических систем и технологических процессов инженеру часто приходится сталкиваться с их характеристиками, которые непрерывным образом меняются во времени t. Такие явления подчиняются физическим законам, описываемым дифференциальными уравнениями. Одной из основных математических задач, решаемых для таких уравнений, является задача Коши. Обычно, к ней приходят, когда известно начальное состояние системы в момент времени t0 и требуется предсказать ее поведение в момент времени t > t0. Рассмотрим задачу Коши для дифференциального уравнения первого порядка: 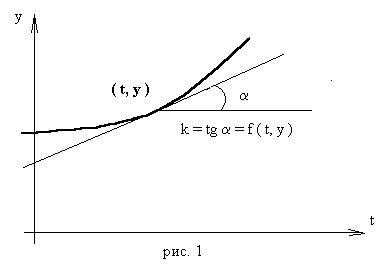 Решением уравнения (1) является дифференцируемая функция y(t), которая при подстановке в уравнение (1) превращается в тождество. График y(t) Решением уравнения (1) является дифференцируемая функция y(t), которая при подстановке в уравнение (1) превращается в тождество. График y(t)называется интегральной кривой рис. (1), а процесс решения называется интегрированием. Заметим, что уравнение (1) задает в каждой точке (t, y) тангенс угла наклона касательной к графику решения, проходящего через эту точку. Если в каждой точке (t, y) задать с помощью некоторого вектора направление касательной, определенной значением f (t, y), то получится поле направлений. 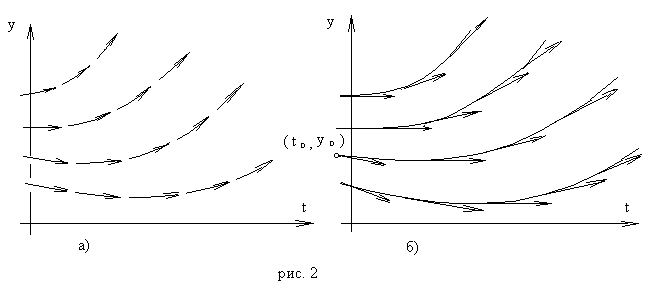 Геометрическая задача интегрирования дифференциальных уравнений состоит в нахождении интегральных кривых, которые в каждой своей точке имеют заданное направление касательной. Для того чтобы выделить из семейства решений дифференциального уравнения (1) конкретное решение, задают начальное условие: y(t0)=y0 Метод Эйлера решения задачи Коши. Воспользуемся формулой Тейлора: R(p+1)(t,h) - остаточный член. Если его отбросить, то получим приближенное равенство: Если значение решения у в т. t известно, то в силу равенства (1) можно считать известными y’(t). Для нахождения производных  Выражения усложняются по мере роста порядка K. Использование приближенной формулы (3) приводит к формуле:  Метод Эйлера является первым и простейшим методом решения задачи Коши. Его можно получить, если в приближенном равенстве (4) положить p = 1, то есть оставить два первых слагаемых. Получим: Геометрическая интерпретация одного шага метода Эйлера заключается в аппроксимации решения на отрезке [tn, tn+1] касательной y = yn + y' (tn) (t-tn), проведенной в точке (tn,yn) к интегральной кривой, проходящей через эту точку. Таким образом, после выполнения N шагов неизвестная интегральная кривая заменяется ломаной линией, для которой угловой коэффициент kn очередного n - го звена равен значению f (tn, yn). (рис. 3) Погрешность аппроксимации в этом случае имеет вид: ВОПРОС №19. Общая постановка задачи Коши. Метод Рунге – Кутта для её решения. Метод Рунге – Кутта 4-го порядка точности. Численное решение задачи Коши. (ВОПРОС №18) Метод Рунге - Кутта решения задачи Коши. Является наиболее популярным из одношаговых методов. Пусть y (t) - решение дифференциального уравнения y' = f (t,y), удовлетворяющее условию y (tn) = yn. Из формулы Ньютона - Лейбница  следует:  (6) (6)Если интеграл в формуле (6) можно было вычислить точно, то получилось бы простое выражение. Однако, в действительности это невозможно, поэтому будем строить приближенную формулу, заменив интеграл квадратурной суммой. Введем на отрезке [tn,tn+1] m вспомогательных узлов 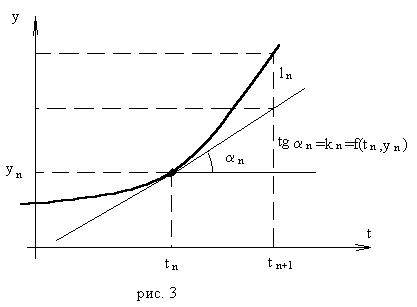 Заменяя, входящий в равенство (6) интеграл квадратурной суммой с узлами tn(1), ... ,tn(m), получим приближенное равенство:  (7) (7)Однако воспользоваться равенством (7) нельзя, т.к. значения y в т.  Заменяя в этом равенстве для каждого i входящий в него интеграл соответствующей квадратурной формулой с узлами tn(1), tn (2), ... , tn(i-1), получим приближенные равенства:  позволяющие последовательно вычислить приближения k y(tn(2)), ..., y(tn(m)). Обозначим через yn(i) вспомогательные величины, являющиеся приближениями k y(tn(i)). Пусть kn(i) = f (tn(i), yn(i)) - приближение к значению углового коэффициента k в точке tn(i). В этом случае расчетные формулы примут вид:  Если выбросить вспомогательные величины yn(i), то те же формулы можно записать в виде:  Полученный метод носит название m - этапного метода Рунге - Кутта. Выбор конкретных значений параметров Метод Рунге - Кутта четвертого порядка точности:  ВОПРОС 20. Постановка 2-х точной краевой задачи. Её ВОПРОС 20. Постановка 2-х точной краевой задачи. ЕёДКЗ представляет собой задачу отыскивания реш. обыкновенного диф. ур. на отр. [а; б] при условии, что реш. заданы на обоих краях отрезка. Рассмотрим методы реш. задач этого класса, кот. можно записать в виде: U''(x)=f(x, u); на примере стационарного ур. теплопроводности: Предпримем, что ф-и q(x), k(x), f(x) известны и выполняется условие k(x)>0, q(x)>0. Тогда распределение температуры в стержне, описывание ф-ей f(x), м.б однозначно определено при задании состояния U(x) на границах отрезка [a, b], т.е U(a)=Ua, U(b)=Ub. Такие краевые условия наз. краевыми условиями 1-го рода. Часто краевую задачу записывают в операторном виде:  L[U](x) – диф. оператор L[U](x) – диф. операторОдним из широко распространенных методов реш. задачи (1) с ограничением (2) явл. метод конечных разностей. В этом методе область непрерывного аргумента заменяет конечным множеством точек (сеткой). После этого вместо ф-ии непрерывного арг. рассмотренные вводится ф-ия, определяющаяся только в узлах сетки (сеточная ф-ия). В этом случае произвед. м. б заменены своими разностными аналогами, т. е приближенно численными выражениями. В итоге исходная краевая задача заменяется дискретной краевой задачей или разностной схемой, представляющей собой сист. линейных и нелинейных алгебраич. ур., реш. кот. приблизительно принимает за реш. исходной задачи. Зададим k(x)=1. В этом сл-е исх. задача примет вид. -U''(x)+q(x)U(x)=f(x) (3) U(a)=Ua, U(b)=Ub (4)  Заменим отрезок [a; b] непрерывного арг. Х сеткой, кот. обозначим Заменим отрезок [a; b] непрерывного арг. Х сеткой, кот. обозначим В результате реш. задачи 3 после подмены непрерывной ф-ии U(x) сеточной ф-ей будет найдена сеточная ф-я Uh, такая, что В результате диф. ур. (3) заменяется следующим: Будем считать, что ф-ия Uh во всех узлах сетки Wh удовлетворяет ур. (5). В этом случае ур. (5) явл. разностным ур. аппроксимации краевой задачи (1) с ограничением (2), фактически явл. системой линейной алгебры уравнений. Преобразуем ур. (5): -Ui-1 +Ui(2+h2qi)-Ui+1=h2fi.  U0=Ua U0=UaUn=Ub Полученную систему удобно реш. методом прогонки. М-д прогонки предназначен для реш. трёх диагональных матриц:  Прямой ход заключается в расчёте прогоночных коэф. α и β. На обратном ходе выч. знач. неизвестной ф-ии. Значения ф-ии Ui выч. на обратном ходе: Un=βn Ui=αiUi+1+βi, ВОПРОС №21. Вычисление собственных чисел матрицы. В процессе конструирования и анализа больших технич. систем инженеру очень часто приходится сталкиваться с задачей нахожд. собств. чисел и собственных векторов исследуемой системы, кот. характеризуют её внутренние св-ва. Математически задача нахождения собственного числа выглядит след. образом: Пусть задана квадратная матрица Аm,m. Обозначаем скалярное произведение 2-х векторов: Число явл. собств. числом матрицы А, если найдётся ненулевой вектор Х, для кот. вып. равенство (1) Ах = х. В этом случае вектор Х наз. собственным вектором матрицы А. Запишем (1) в др. виде: (А-Е)х=0 (2). Е – единичная матрица. Эта система будет им. ненулевое решение тогда, когда определитель матрицы det (A-E)=0 (3). Раскрывая ур. (3), мы получаем характеристическое ур. вида:  1=1; делим на -1: -2+8-13=0 → 2=4± Описанный приём для реш. характерного ур. относят к прямым методам реш. проблем собственных значений. Их применению может воспрепятствовать высокий порядок m, когда корни характеристического ур. становятся чувствительны к погрешности и м.б потеряна достоверная инф. об m величене. Рассмотрим один из самых простых методов реш. задачи о собственных числах – степенной метод без сдвигов. Пусть требуется определить max по модулю собственное значение 1 матрицы А. 1 д.б вещественным. Возмём произвольный вектор х0 и построим из него последовательность векторов Теорема: Пусть задана матрица А достаточно простой структуры, для кот. |1|>|2|≥|3|≥…≥|m|. Предположим что разложение х(0) по базису собственных векторов х0=С1е1+ С2е2+…+ Сmеm происходит с С1≠0. Тогда |k1| → |1|k→∞и справедлива следующая оценка погрешности: Исходя из формулы (4), можно записать, что х(к)=Ак х(0). Допускается следующее усовершенствование метода: y(к)=Ах(k-1), (к)=( y(к), y(к-1)), |