За входную координату принимается напряжение Uз, в качестве выходной величины – частота вращения двигателя Ωд, возмущающим воздействием является момент сопротивления двигателя Мс.
С учетом выше принятых допущениях структурная схема системы автоматического управления, представлена на рисунке 15.
Рисунок 15 – Структурная схема системы автоматизированного управления скоростью двигателя постоянного тока с ТП
2.4 Описание системы автоматического управления в пространстве
состояний
Детализированная схема системы автоматического управления. Для составления детализированной схемы системы автоматического управления необходимо выделить все интеграторы в отдельные звенья.
В соответствии с правилами преобразований структурных схем выполняется обратная операция над звеном ТП. Звено ТП представлено на рисунке 16.
Рисунок 16 – Преобразованная структурная схема ТП
Таким же образом преобразовывается остальные звенья. После выделения всех интеграторов в отдельные звенья структурная схема системы автоматизированного управления будет иметь вид, представленный на рисунке 17.
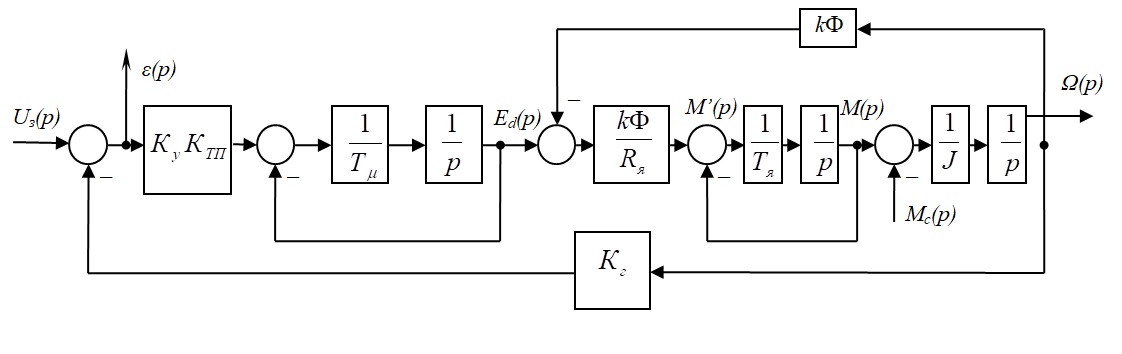
Рисунок 17 – Детализированная структурная схема системы автоматизированного управления
Вектора переменных состояния X и входных воздействий U.
В соответствии с детализированной структурной схемой САУ вектор входных воздействий имеет вид:
Вектор Х – это набор переменных состояния (сигналов снятых с выходов интеграторов), а именно: Еd – выпрямленная ЭДС ТП, M и Ω.
Матрицы А, В, С, D
В матричной форме система описывается следующей системой уравнений:
 (29) (29)
где: А, B, C, D – матрицы состояний.
Матрицы A, B, C, D получают по структурной схеме исходя из уравнений 30 и выбранных матриц Х и U.
Рассмотрим пример получения элемента матрицы А (1-ой строки 3-го столбца).
Этот элемент должен умножатся на Ω (элемент 3-ей строки матрицы Х), другими словами  – это путь прохождения сигнала Ω к Еd: – это путь прохождения сигнала Ω к Еd:
Для нахождения  , необходимо найти путь передачи от М к М: , необходимо найти путь передачи от М к М:
 , и так далее , и так далее
При нахождении путей следует учитывать тот фактор, что сигнал, проходящий против направления движения и через интегратор, не учитывается.
С учетом вышесказанного, получаем:
Матрица С связанна с выходными величинами, то есть необходимо выбрать матрицу выходных сигналов Y:


Передаточные функции замкнутой АСУ по входным воздействиям.
Передаточная функция Uз, определяется по формуле:
 (30) (30)
Подставляя численные значения всех коэффициентов усиления и постоянных времени, получают:
Рисунок 18 – Передаточная функция замкнутой автоматизированной системы управления по входным воздействиям Uз
Передаточная функция замкнутой системы по возмущающему воздействию Мс, определяется по формуле:
После подстановки численных значений всех коэффициентов усиления и постоянных времени, получают:
Рисунок 19 – Передаточная функция замкнутой системы по возмущающему воздействию Мс
Передаточные функции по ошибкам.
Передаточная функция по ошибке от входного воздействия Uз, определяется
 (32) (32)
Подставляя численные значения всех коэффициентов усиления и постоянных времени, получают:
Рисунок 19 – Передаточная функция по ошибке от входного воздействия Uз
Передаточную функцию по ошибки от Мс, определяют по формуле:
После подстановки численных значений всех коэффициентов усиления и постоянных времени, получают:
Рисунок 20 – Передаточная функция по ошибке от Мс
|
 Скачать 1.14 Mb.
Скачать 1.14 Mb.