2.6 Коэффициенты передачи. Напряжение задания. Статическая
ошибка системы
Определение коэффициента передачи системы автоматического управления. Для определения коэффициента передачи по напряжению (КU) используют передаточную функцию WUз(p):
 , (34) , (34)
Коэффициент передачи по моменту сопротивления (КM) определяют аналогичным образом:
 , (35) , (35)
Определение Uз, В:
Определение статической ошибки (ε).
На основании метода суперпозиции установившаяся ошибка САУ, В, может быть представлена следующим образом:
 , при , при  , ,
где – ошибка отработки системой задающего воздействия (Uз), – ошибка отработки системой задающего воздействия (Uз),
 – ошибка, вызванная действием возмущающего воздействия (Мс). – ошибка, вызванная действием возмущающего воздействия (Мс).




 . .
2.7 Синтез корректирующего устройства
КУ применяют в АСУ для обеспечения устойчивости и требуемого качества регулирования.
В соответствии с методом синтеза корректирующих устройств, выполняют два этапа:
строят ЛАЧХ исходной системы;
по заданным показателям качества строят желаемую ЛАЧХ.
ЛАЧХ разбиваем на три участка: низкочастотную (НЧ), среднечастотную (СЧ) и высокочастотную (ВЧ) асимптоты.
СЧ асимптоту проводят через частоту среза  , которую определяют по номограммам и заданным показателям качества переходного процесса , которую определяют по номограммам и заданным показателям качества переходного процесса
( , ,  ), в приделах ), в приделах  . .

 . .
Принимается   . Наклон среднечастотной асимптоты – 20 дБ/дек. . Наклон среднечастотной асимптоты – 20 дБ/дек.
Низкочастотная часть частотной характеристики определяет статические свойства системы автоматического управления, то есть точность. Так как требуемый коэффициент усиления системы Кр, должен остаться неизменным, то низкочастотную асимптоту сопрягают с ЛАЧХ исходной системы. Таким образом, продлевая среднечастотную асимптоту до пересечения с ЛАЧХ нескорректированной системы.
Высокочастотный участок желаемой ЛАЧХ мало влияет на динамические свойства системы, поэтому высокочастотная асимптота строится из соображений простоты корректирующего устройства, для дальнейшей его реализации. Таким образом, высокочастотная часть проводится с наклоном -20 дБ/дек до частоты сопряжения исходной системы   , затем с наклоном -40дБ/дек до частоты , затем с наклоном -40дБ/дек до частоты  , после чего с наклоном – 60 дБ/дек. , после чего с наклоном – 60 дБ/дек.
ЛАЧХ корректирующего устройства находят посредством графического вычитания ЛАЧХ исходной системы из ЛАЧХ желаемой, в соответствии с рисунком 21.
 , ,
где  – ЛАЧХ корректирующего устройства, – ЛАЧХ корректирующего устройства,
 – желаемая ЛАЧХ, – желаемая ЛАЧХ,
 – ЛАЧХ исходной системы. – ЛАЧХ исходной системы.
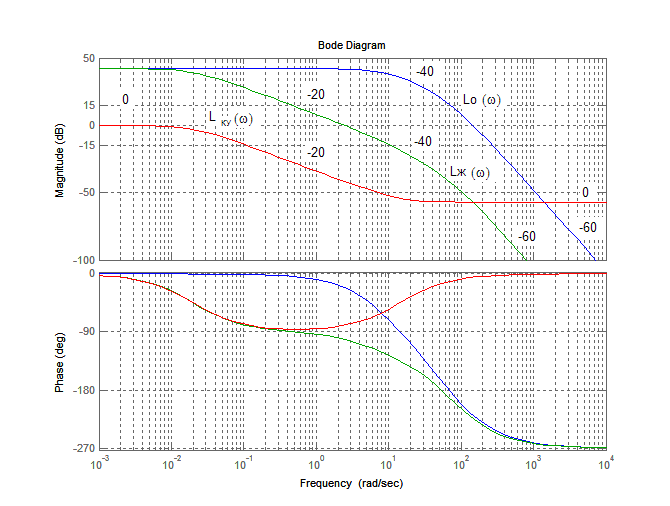
Рисунок 21 – ЛАЧХ и ЛФЧХ корректирующего устройства, исходной и скорректированной системы
По ЛАЧХ КУ записывают его передаточную функцию:
 , ,
Такую передаточную функцию реализовывают с помощью операционного усилителя, со схемой, представленной на рисунке 22.
Рисунок 22 – Схема корректирующего устройства
2.8 Переходный процесс автоматизированной системы управления
Для проверки качества регулирования строиться кривая переходного процесса полученной системы, представленная на рисунке 19.
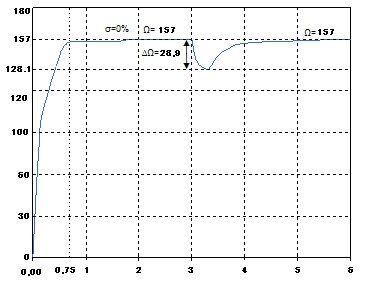
Рисунок 23 – Кривая процесса системы автоматического управления
Время регулирования tp = 0,75 c.
Установившееся значение скорости Ω = 157 рад/с;
Просадка скорости при номинальном крутящем моменте ∆Ω = 28,9 рад/с.
Полученный переходный процесс полностью отвечает заданным показателям качества.
Заключение
Результатом выполнения курсового проекта является проведение анализа системы автоматического управления освещенностью помещения. В ходе выполнения работы получены следующие результаты:
проведен анализ и изучены особенности регулирования автоматической
системы освещения, дано описание принципа работы одноконтурной системы управления системой освещения;
приведена поэлементная схема работы системы автоматического управления электродвигателем, разработана система управления скоростью электродвигателем постоянного тока;
составлена математическая модель управления электродвигателем, выполнен расчет устойчивости исследуемой системы управления электродвигателем.
произведено проектирование системы автоматического управления стабилизации скорости электродвигателя постоянного тока с тиристорным преобразователем;
произведено поэлементное описание системы и переходного процесса автоматической системы управления, математической модели системы автоматизированного управления, структурной схемы системы автоматического управления;
определена природа управляющего воздействия и возмущения и передаточные функции системы, коэффициенты передачи, статическая ошибка системы, синтез корректирующего устройства.
В процессе работы выполнено проектирование системы автоматического управления двигателем постоянного тока, в ходе проектирования САУ достигнуты следующие показатели качества:
время регулирования: tp = 0,75 с;
просадка скорости вращения ротора двигателя при номинальном моменте сопротивления: ∆Ω =28,9 рад/с;
перерегулирование:  . .
Требуемые показатели качества:
время регулирования: tp max = 0,35 с;
перерегулирование: .
Продолжить рассмотрение темы курсового проекта можно более детальным изучением литературных источников и опыта зарубежных авторов в области внедрения автоматизированных систем освещения.
Результаты, полученные в ходе выполнения курсового проекта, можно использовать для закрепления и применения полученных навыков, при изучении дисциплины «Световая организация городской среды» а также при проектировании систем автоматического освещения помещений.
Список использованных источников
Келим, Ю.М. Типовые элементы систем автоматического управления / Ю.М. Келим // Москва: Форум, 2002. – 384 с.
Како, Н. Производственное издание «Датчики и микро-ЭВМ» / Н. Како, Я. Яманэ. перевод с японского Г.Н. Горбунова. – Ленинград: Энергоиздат, Ленинградское отделение, 1986. – 120 с.
СНиП СП 52.13330 – 2010. Естественное и искусственное освещение. СНиП 23-05-95. Москва: Госстрой России, ГУП ЦПП, 2010 – 68 с.
Вернер, В. Интеллектуальная система управления внутренним освещением / В. Вернер // Светотехника, 1993. – № 4. – С. 15-19.
Гора, Е.П. Экология человека / Е.П. Гора. – Москва: Дрофа, 2007 – 540 с. – ISBN 978-5-358-00773-4.
Прокофьев, А.С. Перспективы применения светодиодов в растениеводстве / А.С. Прокофьев, А.Н. Туркин, А.А. Яковлев // Полупроводниковая светотехника, № 5. – 2010. – С. 52-56.
Ульянов, Р.С. Концепция системы освещения помещений с автоматическим управлением на базе светодиодов / Р.С. Ульянов, В.А. Завьялов // Молодой ученый. – 2013 – № 3. – С. 108-111.
Ашкинази, Л.А. Электронные лампы: Из прошлого в будущее № 5 / Л.А. Ашкинази // Москва: 2 URSS, 2013. – 224 с. – ISBN 978-5-382-01432-6.
Светодиодный фитопрожектор: пат. 2454066 Рос. Федерация: МПК F01G9/20 / Марков В.Н.; заявитель и патентообладатель Марков Валерий Николаевич – № 2008100312/12 заявл. 15.01.2008, опубл. 10.10.2009, Бюл. № 28. – 28 – 18 с.
Айзенберг, Ю.Б. Энергосбережение в освещении / под ред. Ю.Б. Айзенберга / Москва: Знак, 1999. – 264 с.
Хартов, В.Я. Микроконтроллеры AVR. Практикум для начинающих / В.Я. Хартов / Москва: Издательство МГТУ им. Н.Э. Баумана, 2007. – 240 с.
Евстифеев, А.В. Микроконтроллеры AVR семейств Tiny и Mega фирмы «Atmel» / А.В. Евстигнеев. – Москва: Додэка-XXI, 2004. – 560 с.
Михеев, В.П. Датчики и детекторы: учеб. пособие / А.В. Просандерев, В.П. Михеев. – Москва: Издательство МИФИ, 2007. – 172 с.
Королев, С.А. Датчики и детекторы физико-энергетических установок: учеб. пособие / В.П. Михеев, С.А. Королев. – Москва: НИЯУ МИФИ, 2011. – 232 с. – ISBN 978-5-7262-1547-1.
Гайдук, А.Р. Теория автоматического управления в примерах и задачах с решениями в MATLAB. 2-е изд., испр / А.Р. Гайдук, В.Е. Беляев. – Санкт-Петербург: Лань, 2011. – 464 c. – ISBN 978-5-8114-1255-6.
Анучин, А.С. Системы управления электроприводов / А.С. Анучин. – Вологда: Инфра-Инженерия, 2015. – 373 c. – ISBN 978-5-383-00918-5.
Власов, К.П. Теория автоматического управления. Основные положения программы расчета / К.П. Власов. – Москва: Гуманитарный Центр, 2013. – 544 c.
Жежера, Н.И. Математическое описание устройств и процессов как объектов систем автоматического управления: монография / Н.И. Жежера. – Москва: Креативная экономика, 2012. – 200 с. – ISBN 978-5-91292-082-0.
Евсюков, В.Н. Анализ линейных автоматических систем: учеб.-метод. пособие / В.Н. Евсюков; «Оренбург. гос. ун-т». – 3-е изд., перераб. и доп. – Оренбург: ИП Осиночкин, 2012. – 237 с.
Лазарева, Т.Я. Интегрированные системы проектирования и управления в машиностроении. Структура и состав учеб. пособие для вузов / Т.Я. Лазарева. – 2-е изд., перераб. и доп. – Старый Оскол: ТНТ, 2010. – 236 с. – ISBN 978-5-94178-159-1.
Москаленко, В.В. Системы автоматизированного управления электропривода / В.В. Москаленко. – Вологда: Инфра-Инженерия, 2016. – 208 c. – ISBN 978-5-16-005116-1.
Куйсоков, Т.А. Теория автоматического управления: методические указания к курсовому проектированию / Т.А. Куйсоков, Бузулукский гуманитарно-технологический институт (филиал) ОГУ, Бузулук: БГТИ, 2014. – 45 с.
Ким, Д.П. Теория автоматического управления: учебник и практикум для академического бакалавриата / Д.П. Ким. – Москва: Юрайт, 2018. – 276 с. – ISBN 978-5-9916-9294-6.
Агравал, Г.П. Системы автоматического управления: теория, применение, моделирование в MATLAB: учебное пособие // Г.П. Агравал. – Санкт-Петербург: Лань, 2013. – 208 c. – ISBN 5-03-002418-2.
Ашанин, В.Н. Система освещения автомобиля / В.И. Коротков, С.Е. Ларкин, В.Н. Ашанин. – Пенза: Изд-во ПГУ, 2012. – 257 с. – ISBN 978-5-94170-445-3.
Федеральный закон от 23.11.2009 № 261-ФЗ (ред. от 29.12.2014) «Об энергосбережении и о повышении энергетической эффективности и о внесении изменений в отдельные законодательные акты Российской Федерации».
Приложение А
(справочное)
Схема мехатронной системы автоматического регулирования освещения
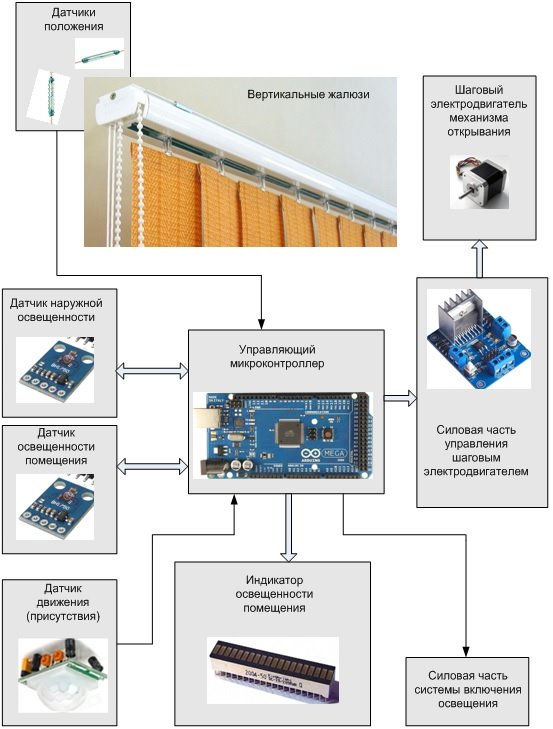
Рисунок А.1 – Структурная схема мехатронной системы автоматического регулирования внутреннего освещения жилого помещения.
Приложение Б
(справочное)
Структурная схема автоматизированной системы управления освещением с интегрированной автономной системой управления
Рисунок Б.1 – Структурная схема автоматизированной системы управления освещением с интегрированной автономной системой управления.
|
 Скачать 1.14 Mb.
Скачать 1.14 Mb.

