Задание. Варианты 2650
 Скачать 1.74 Mb. Скачать 1.74 Mb.
|

|
Задание. Варианты 26-50. Проектирование систем автоматического регулирования частоты вращения электродвигателя ваерной лебедки. Общая характеристика системы управления ваерными лебедками судов типа "Атлантик-333" дана при задании вариантов 1-25. Принципиальная схема системы приведена на рис.6, исходные данные для расчета – в таблице 2. При этом следует учитывать, что электронные элементы системы (датчик тока, блок управления, управляемый выпрямитель) принимаются в качестве безынерционных звеньев. Передаточный коэффициент регулятора определяется статическим расчетом системы.  2 Принципиальная схема и принцип действия  Рис. 1 Принципиальная схема автоматического регулирования частоты вращения электродвигателя ваерной лебёдки Тахогенератор (BR), вращаясь от электродвигателя ваерной лебёдки (M), вырабатывает напряжение  , прямо пропорционально зависящее от частоты его вращения. , прямо пропорционально зависящее от частоты его вращения. задаётся реостатом задаётся реостатом  , поддерживающимся опорным напряжением , поддерживающимся опорным напряжением  . Разность напряжений . Разность напряжений  подаётся на регулятор, преобразующий подаётся на регулятор, преобразующий  в в  . . подаётся на блок управления, который преобразовывает подаётся на блок управления, который преобразовывает  в в  , подающееся на управляемый выпрямитель, работающий от напряжения сети , подающееся на управляемый выпрямитель, работающий от напряжения сети  . .Полученное напряжение  подаётся на обмотку возбуждения электродвигателя, регулируя тем самым скорость его вращения. подаётся на обмотку возбуждения электродвигателя, регулируя тем самым скорость его вращения.Ток обмотки  снимается датчиком тока (шунтом). Напряжения с шунта подаётся на нормирующий усилитель и преобразовывается в снимается датчиком тока (шунтом). Напряжения с шунта подаётся на нормирующий усилитель и преобразовывается в  . .3 Функциональная схема системы и ее классификационная характеристика  Рис. 2 Функциональная схема судовой системы автоматического регулирования ЗУ — задающее устройство ;Рег1 — регулятор; Рег2 — блок управления; ИМ — управляемый выпрямитель; РО — обмотка возбуждения электродвигателя; ОУ — электродвигатель ваерной лебёдки; ЧЭ1 — шунт в цепи возбуждения и нормирующий усилитель; ЧЭ2 — тахогенератор. 1. По характеру задающего воздействия: система стабилизации; 2. По наличию обратной связи: система замкнутая; 3. По принципу построения: система с регулированием по отклонению; 4. По математическому описанию: система линейная; 5. По наличию статической ошибки: система средней точности; 6. По виду используемой энергии: электрическая; 7. По характеру обработки информации и выдачи управляющего воздействия: непрерывная. 4 Дифференциальные уравнения и передаточные функции всех элементов системы. Структурная схема системы. Эквивалентная передаточная функция системы, устанавливающая связь между регулируемой величиной и задающим воздействием  Рис. 3 Принципиальная схема двигателя постоянного тока в случае регулирования частоты вращения путём изменения потока возбуждения при постоянном токе в обмотке якоря Входная величина — ;Выходная величина —  . .Исходными физическими уравнениями являются уравнения электрического и механического равновесия. Схема цепи возбуждения позволяет составить уравнение электрического равновесия:  где  — активное сопротивление цепи возбуждения; — активное сопротивление цепи возбуждения; — индуктивность цепи возбуждения. — индуктивность цепи возбуждения.Так как при данном способе регулирования ток  , протекающий через обмотку якоря, поддерживается практически постоянным, а ток , протекающий через обмотку якоря, поддерживается практически постоянным, а ток  в обмотке возбуждения изменяется, то уравнение моментов может быть записано в виде: в обмотке возбуждения изменяется, то уравнение моментов может быть записано в виде: 4.1 Вывод дифференциального уравнения Определим ток и его производную  из уравнения (1) и введём полученные результаты в уравнение (2). из уравнения (1) и введём полученные результаты в уравнение (2).После преобразований получим дифференциальное уравнение:  Где  — постоянная времени обмотки возбуждения; — постоянная времени обмотки возбуждения; — электромеханическая постоянная времени двигателя; — электромеханическая постоянная времени двигателя; — передаточный коэффициент двигателя. — передаточный коэффициент двигателя.Если к уравнению (3) применим преобразование Лапласа (начальные условия нулевые), то уравнение примет вид:  Определив отношение лапласова изображения выходной величины к лапласову изображению входной, получим выражение передаточной функции элемента:   Рис. 4 Принципиальная схема дифференциального уравнения тахогенератора постоянного тока с независимым возбуждением Входная величина — ;Выходная величина —  . .Схема цепи возбуждения генератора позволяет составить уравнение электрического равновесия:  где — активное сопротивление цепи возбуждения генератора; — индуктивность цепи возбуждения.Если генератор работает в ненасыщенном режиме, то напряжение на зажимах якоря генератора можно определить так:  4.2 Вывод дифференциального уравнения Выразим ток Iв из уравнения (7) и подставим в уравнение (6). После преобразований получим дифференциальное уравнение:  где  — постоянная времени обмотки возбуждения; — передаточный коэффициент генератор — постоянная времени обмотки возбуждения; — передаточный коэффициент генераторЕсли к уравнению (8) применим преобразование Лапласа (начальные условия нулевые), то уравнение примет вид:  Определив отношение лапласова преобразования выходной величины к лапласову преобразованию входной, получим выражение передаточной функции элемента:  4.3 Вывод передаточных функций всех элементов системы 1) Передаточная функция двигателя: Для его нахождения применим данные таблицы 1 и пункт 4.1:     , С , С  , С , СПодставим полученные данные в формулу (5) и выделим две передаточные функции. Рассчитаем  и и  , а также , а также  и и  : : (14) (14)  (15) (15)   2) Передаточная функция тахогенератора: Для его нахождения применим данные таблицы 1 и пункт 4.2:  (16) (16)  Подставим в формулу (10):  3) Передаточная функция блока управления: Для его нахождения и нахождения следующих передаточных функций применим данные таблицы 1:  (17) (17) 4) Передаточная функция управляемого выпрямителя:  (18) (18) 5) Передаточная функция нормирующего усилителя:   (19) (19)6) Передаточная функция регулятора:  (20) (20)4 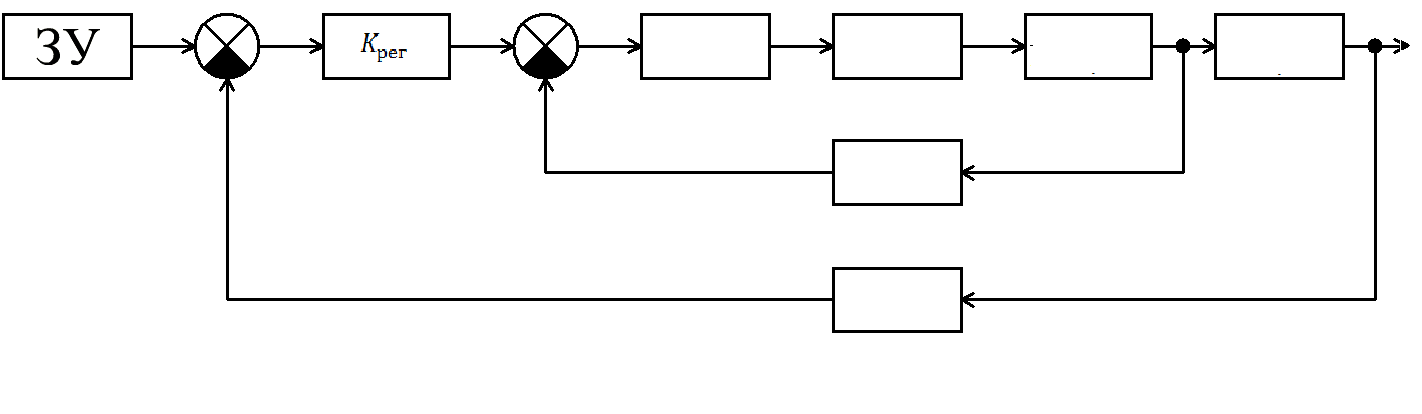 .4 Структурная схема системы .4 Структурная схема системы     Рис. 5 Структурная схема системы 4.5 Эквивалентная передаточная функция системы Р 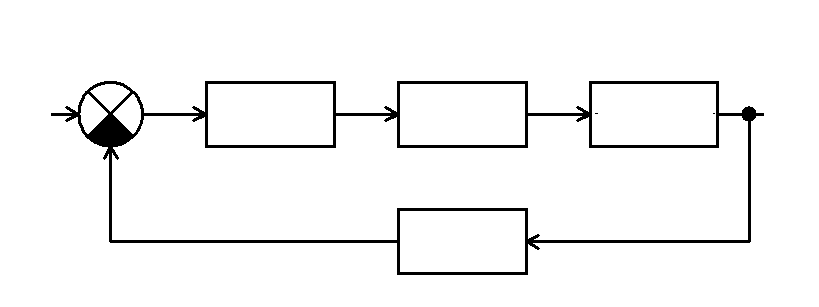 ассчитаем эквивалентную передаточную функцию системы малой обратной связи: ассчитаем эквивалентную передаточную функцию системы малой обратной связи:  Рис. 6 Структурная схема малой обратной связи    Получим новую структурную схему системы: 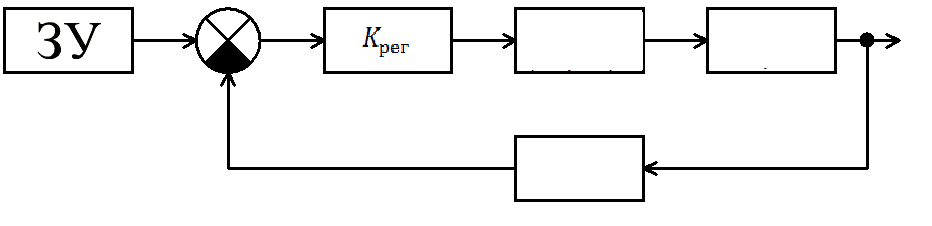    Рис. 7 Эквивалентная структурная схема Для того, чтобы продолжить наши расчёты, следует рассчитать  , поэтому перейдём к следующему пункту. , поэтому перейдём к следующему пункту.5 Статический расчет системы. Определение передаточного коэффициента системы, обеспечивающего заданную величину статической ошибки по задающему воздействию Относительная статическая ошибка системы по задающему воздействию определяется по формуле  где  — коэффициент передачи разомкнутой системы. — коэффициент передачи разомкнутой системы.В этом случае, передаточный коэффициент системы, обеспечивающий заданную величину статической ошибки, определяется по формуле:  где  — заданная статическая ошибка, определяемая из таблицы 1. — заданная статическая ошибка, определяемая из таблицы 1. Найдём из нашей системы: где  — числитель — числитель  . . Выразим из формулы (24), подставив в неё найденные , , и данное по условию  из таблицы 1: из таблицы 1:   Теперь структурная схема принимает вид: 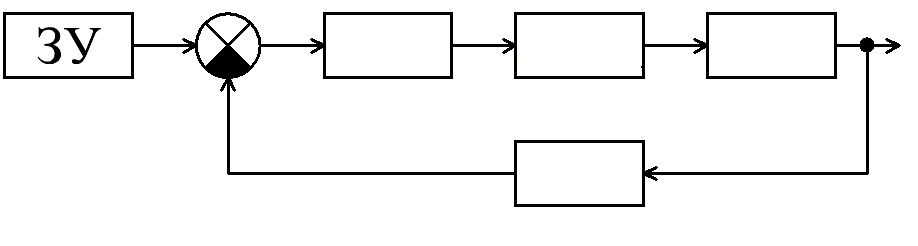     Рис. 8 Дополненная структурная схема Рассчитаем  и и  : :   Окончательный вид структурной схемы:   Рис. 9 Окончательная структурная схема 6 Исследование устойчивости системы с помощью критериев Гурвица, Михайлова и Найквиста. Выполнение Д-разбиения по общему передаточному коэффициенту системы и установление минимально достижимой величины установившейся ошибки Рассмотрим устойчивость системы по: 1) критерию Гурвица: Характеристическое уравнение принимает вид:  Составим матрицу:  Найдём определители матрицы:    Так как определители двух последних матриц меньше нуля, то из этого можно сделать вывод, что система не устойчива. 2) критерию Михайлова: Построим АФЧХ по следующей функции:  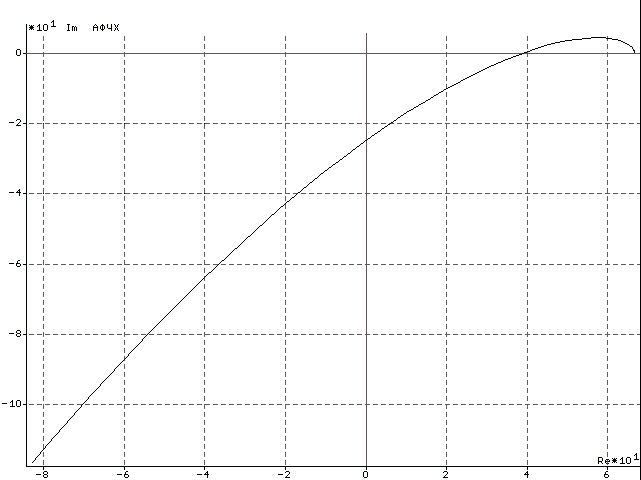 Рис. 10 АФЧХ характеристического уравнения На рис. 10 видно, что кривая проходит четверти по порядку: I, IV, III, что не удовлетворяет условию устойчивости: I, II, III, поэтому система не устойчива. 3) критерию Найквиста: По передаточной функции , найденной по формуле (27), построим АФЧХ: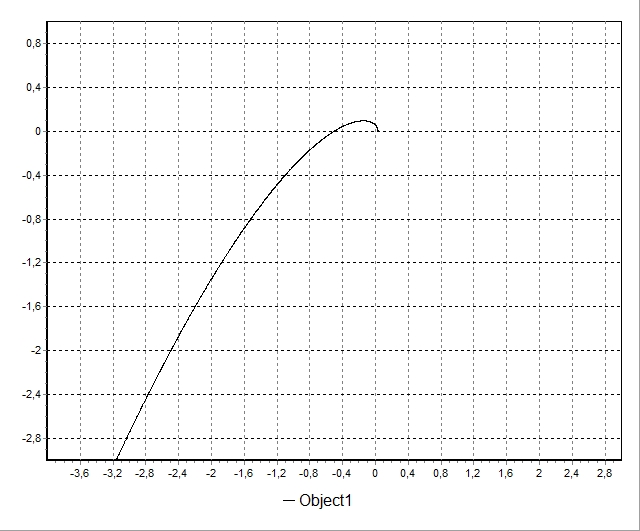 Рис. 11 АФЧХ разомкнутой системы На рис. 11 видно, что точка  находится вне окружности кривой, откуда можно сделать вывод, что по данному критерию система не устойчива. находится вне окружности кривой, откуда можно сделать вывод, что по данному критерию система не устойчива.Из полученных данных можно сделать вывод, что по двум критериям система не устойчива, откуда следует то, что данная система не устойчива. Выполненим Д-разбиение по общему передаточному коэффициенту системы:  (28) (28)Найдём формулы (32): (29) (29)Возьмём характеристическое уравнение формулы (29):  (30) (30)Подставим в формулу (30)  : : (31) (31)Найдём корни характеристического уравнения (31):  (32) (32)В формуле (32) обозначим  : : (33) (33)Выделим действительную и мнимую части:  (34) (34) (35) (35)Приравняем мнимую часть к нулю и найдем корни получившегося уравнения:  Подставим полученные значения в выражение вещественной части:  Отложим на комплексной плоскости значения  и и  : : 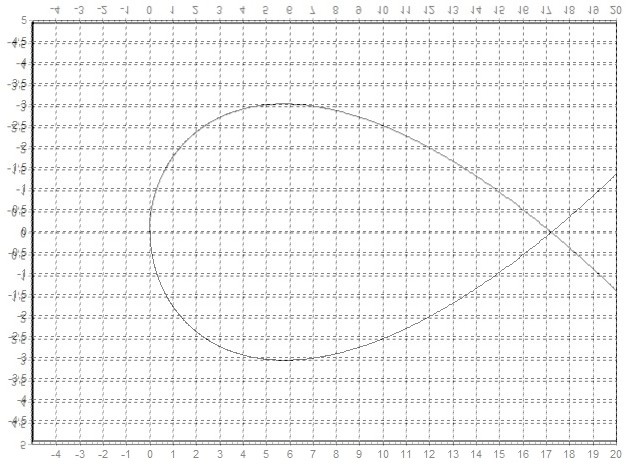 Рис. 12 График D-разбиения На рис. 12 видно, что область устойчивости находится в диапазоне  Пользуясь формулой , найдём диапазон : Найдём статическую ошибку при  , пользуясь формулой (24): , пользуясь формулой (24): Данная по условию статическая ошибка не обеспечивает устойчивую работу системы, из этого следует, что необходима коррекция системы. 7 Моделирование в пакете AUTOCONT поведения замкнутой системы  Рис. 13 Поведение замкнутой системы На рис. 13 видно, что данная система не устойчива, требуется коррекция. 8 Расчет корректирующего устройства 8.1 Построение логарифмических частотных характеристик системы, удовлетворяющих заданным показателям качества Для построения исходной ЛАЧХ упростим выражение :  Определим низкочастотный участок:   Рассчитаем точки перелома для всех участков по формуле:  Переведем в логарифмический масштаб и представим в таблице:  Построим исходную ЛАЧХ:  Рис. 14 Исходная ЛАЧХ Построим желаемую ЛАЧХ: Для низкочастотного участка:     Для среднечастотного участка: Берём наклон данного участка  . .Высчитаем среднее значение частоты, при котором  : : где  — коэффициент определяющий перерегулирование. — коэффициент определяющий перерегулирование.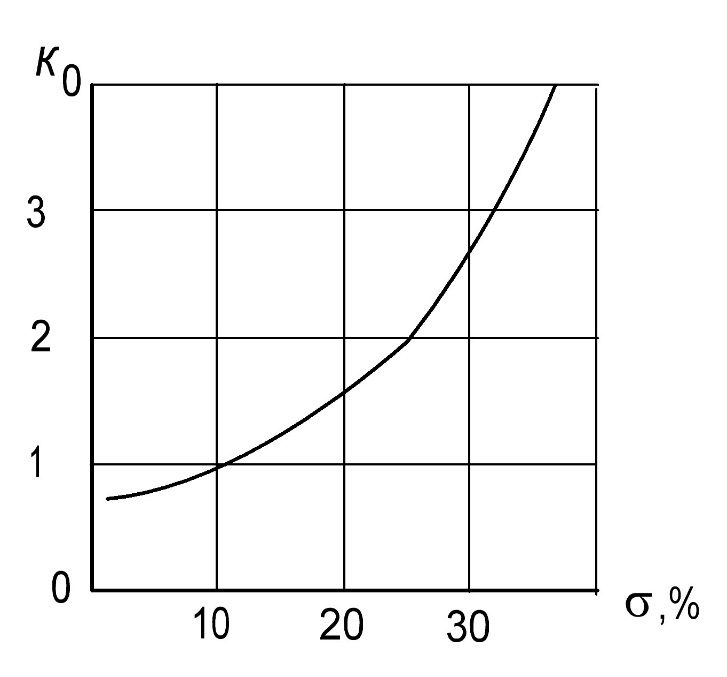 Рис. 15 График определения коэффициента Руководствуясь данными таблицы 1, выбираем   и определим и определим  в логарифмическом масштабе по формуле (38): в логарифмическом масштабе по формуле (38):  Используем следующий среднечастотный участок:  Высчитаем границы среднечастотного участка  и и  : :    Соединим среднечастотный участок с низкочастотным отрезком, имеющим наклон  и рассчитаем и рассчитаем  , при котором данный участок сопрягается с низкочастотным: , при котором данный участок сопрягается с низкочастотным:   Построим желаемую ЛАЧХ.  Рис. 16 Желаемая ЛАЧХ Построим ЛФЧХ желаемой ЛАЧХ:  где  — порядок астатизма системы; — порядок астатизма системы; , где , где  — наклон -го участка ЛАЧХ в — наклон -го участка ЛАЧХ в  ; ; — постоянная времени. — постоянная времени. , так как система не астатическая. , так как система не астатическая.Найдём  : :   Подставим полученные значения в уравнение (55):  Построим ЛФЧХ по данному уравнению:  Рис. 17 ЛФЧХ желаемой ЛАЧХ Из рис. 17 можно найти запас по фазе  = -112 + 180 = 68 град = -112 + 180 = 68 градЗапас по фазе равен 68 градусов 8.2 Выбор способа коррекции и расчет логарифмической частотной характеристики корректирующего устройства Выбираем последовательный способ коррекции системы. Построим ЛАЧХ корректирующего устройства, зная, что  : :Выделим значения частот переломов:   Рисунок 18 – ЛАЧХ корректирующего устройства 8.3 Расчет передаточной функции корректирующего устройства 1) Параметры первого ЛАЧХ: Это интегро-дифференциальное звено с проявлением интегрирующих свойств и единичным коэффициентом усиления:   2) Параметры второго ЛАЧХ: Это интегро-дифференциальное звено с проявлением интегрирующих свойств и единичным коэффициентом усиления:   3) Параметры третьего ЛАЧХ:- Это интегро-дифференциальное звено с проявлением дифференцириющих свойств и единичным коэффициентом усиления:   4) Параметры четвертого ЛАЧХ: Это интегро-дифференциальное звено с проявлением дифференцириющих свойств и единичным коэффициентом усиления:   Таким образом, передаточная функция корректирующего устройства имеет вид:   8.4 Построение графика переходного процесса скорректированной замкнутой системы     Строим график переходного процесса: 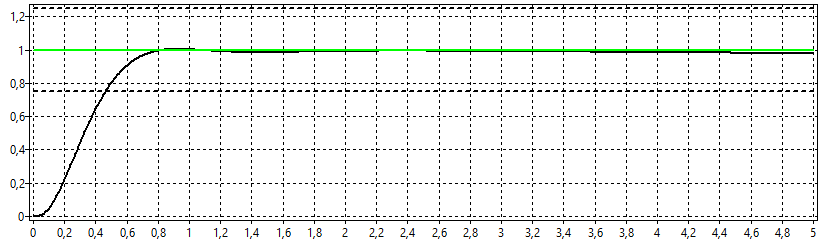 Рис. 20 График переходного процесса с корректирующим звеном 8.5 Синтез корректирующего устройства и выбор элементной базы 1) Выбираем элементы для первого корректирующего звена:  Данное звено интегро-дифференцирующее с проявлением интегрирующих свойств. 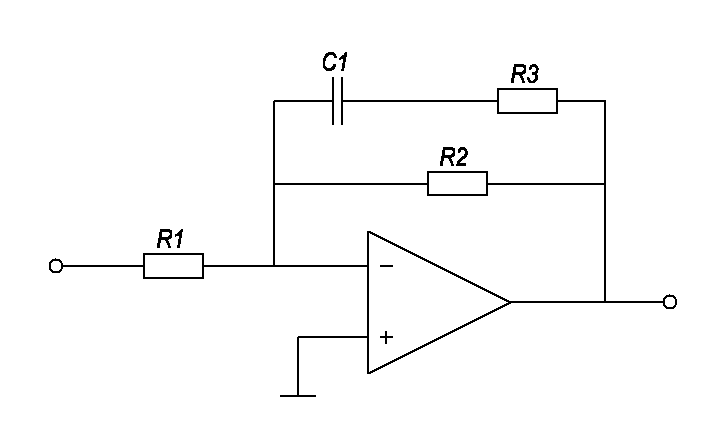 Рис. 21 Реализация интегро-дифференцирующего звена на ОУ с интегрирующими свойствами     Выбираем конденсатор: ECAP (К50-35), 100 мкФ, 25 В, 105°C, Конденсатор электролитический алюминиевый.   кОм кОмИз номинального ряда выбираем резистор: МЛТ-0,25,  кОм, 5% кОм, 5%   кОм кОмИз номинального ряда выбираем резистор: МЛТ-0,25,  кОм, 5% кОм, 5%   кОм кОмИз номинального ряда выбираем резистор: МЛТ-0,25, кОм, 5%2) Выбираем элементы для второго корректирующего звена: Данное звено интегро-дифференцирующее с проявлением интегрирующих свойств, поэтому к нему применима цепь рисунка 21, а также формула (43). Выбираем конденсатор: ECAP (К50-35), 100 мкФ, 25 В, 105°C, Конденсатор электролитический алюминиевый.   кОм кОмИз номинального ряда выбираем резистор: МЛТ-0,25,  кОм, 5%. кОм, 5%.  кОм кОмИз номинального ряда выбираем резистор: МЛТ-0,25,  кОм, 5%. кОм, 5%.  кОм кОмИз номинального ряда выбираем резистор: МЛТ-0,25, кОм, 5%.3) Выбираем элементы для третьего корректирующего звена:  Данное звено интегро-дифференцирующее с проявлением дифференцирующих свойств. 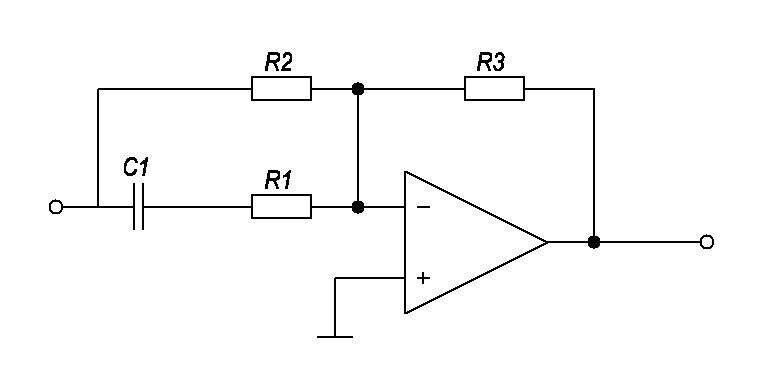 Рис. 22 Реализация интегро-дифференцирующего звена на ОУ с дифференцирующими свойствами    Выбираем конденсатор: ECAP (К50-35), 100 мкФ, 25 В, Конденсатор электролитический алюминиевый миниатюрный.   кОм кОмИз номинального ряда выбираем резистор: МЛТ-0,25,  кОм, 5%. кОм, 5%.  кОм кОмИз номинального ряда выбираем резистор: МЛТ-0,25,  кОм, 5%. кОм, 5%. кОм кОмИз номинального ряда выбираем резистор: МЛТ-0,25, кОм, 5%.4) Выбираем элементы для четвертого корректирующего звена: Данное звено интегро-дифференцирующее с проявлением дифференцирующих свойств, поэтому к нему применима цепь рисунка 22, а также формула (48). Выбираем конденсатор: ECAP (К50-35), 100 мкФ, 25 В, Конденсатор электролитический алюминиевый миниатюрный.  кОм кОмИз номинального ряда выбираем резистор: МЛТ-0,25,  кОм, 5%. кОм кОм, 5%. кОмИз номинального ряда выбираем резистор: МЛТ-0,25, кОм, 5%.  кОм кОмИз номинального ряда выбираем резистор: МЛТ-0,25, кОм, 5%.8.6 Построение переходного процесса для замкнутой системы с корректирующим устройством, собранным на реальных элементах Рассчитаем  , ,  , , , , с учётом стандартных значений элементов: с учётом стандартных значений элементов:    Рассчитаем : Рассчитаем : 8.7 Построение переходного процесса для замкнутой системы с корректирующим устройством без ограничения и с ограничением на управление 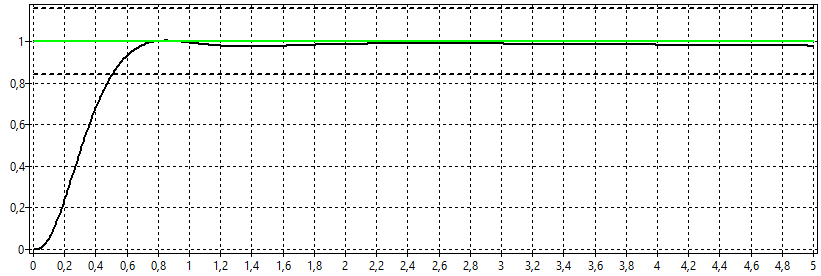 Рис. 23 График переходного процесса с корректирующим устройством, основанном на реальных элементах 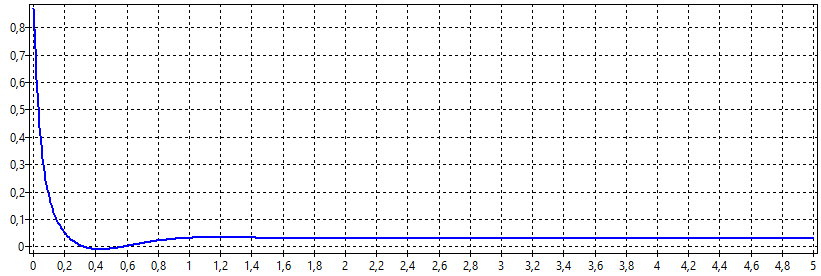 Рис. 24 График сигнала после КУ без ограничения в системе 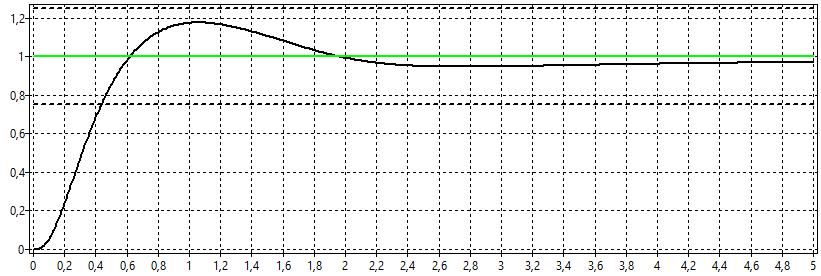 Рис. 25 График переходного процесса с выхода системы со значением ограничения 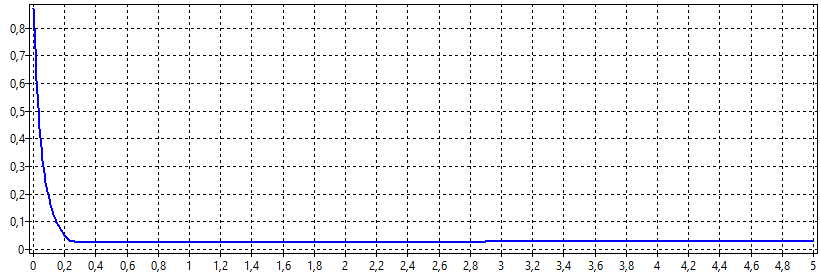 Рис. 26 График сигнала после КУ с ограниченичением в системе Список использованной литературы Бесекерский, В. А. Теория систем автоматического регулирования / В. А. Бесекерский, Е. П. Попов. − 4-е изд., перераб. и доп. − СПб : Профессия, 2004. − 747 с. – (Специалист). Власенко, А. А. Судовая электроавтоматика / А. А. Власенко, В. А. Стражмейстер. – М. : Транспорт, 1983. ‑ 368 с. Маслов, А. А. Введение в Autocont с примерами моделирования систем автоматического управления : учеб. пособие для вузов / А. А. Маслов, С. И. Ушаков, А. Ю. Висков. Мурманск : Изд-во МГТУ, 2005. ‑ 74 с. Прохоренков, А. М. Судовая автоматика / А. М. Прохоренков, В. С. Солодов, Ю. Г. Татьянченко. М. : Колос, 1992. ‑ 448 с. Соколова, Н. В. Синтез нелинейных корректирующих устройств / Н. В. Соколова, В. Т. Шароватов. – Л. : Энергоатомиздат, 1985. ‑ 111 с. : ил. Теория автоматического управления : учебник для вузов. / В. Н. Брюханов [и др]. ; под ред. Ю. М. Соломенцева. ‑ 4-е изд. М. : Высш.шк., 2003. – 268 с.
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||