диплом. Рассмотреть зарубежную практику применения объектов средств контроля подвижного состава на участке железной дороги
 Скачать 1.54 Mb. Скачать 1.54 Mb.
|

|
Введение Одной из главных задач железнодорожного транспорта является максимальное расширение его влияния на рынке транспортных услуг при повсеместном снижении эксплуатационных расходов во всех хозяйствах. Для обеспечения надежных и эффективных транспортных связей между поставщиками и потребителями требуется изменение технологии и повышение уровня управления эксплуатационной деятельностью железных дорог. Это в свою очередь требует повышения оснащенности железных дорог средствами автоматизации и информационного обеспечения перевозочного процесса. Они относятся к группе технических средств, которые комплексно влияют на экономические показатели всех отраслей железнодорожного транспорта и в целом на рентабельность работы сети железных дорог. Следовательно, развитие средств автоматизации является одним из приоритетных направлений в совершенствовании работы железных дорог. Комплекс технических средств многофункциональный КТСМ-02 обеспечивает контроль за состоянием подвижного состава, что позволяет предотвратить аварийные ситуации на железной дороге. Это повышает надёжность и качество услуг. Целью дипломной работы является изучение функционирования средств контроля подвижного состава, находящихся в зоне оперативной деятельности участка железной дороги и разработка приоритетных направлений АРМ для сети информационного обеспечения в системе мониторинга технического состояния подвижного состава. Для реализации поставленной цели необходимо решить следующие задачи: изучить теоретические основы функционирования объектов средств контроля подвижного состава на участке железной дороги; охарактеризовать нормативно-правовые акты, регулирующие условия функционирования объектов средств контроля подвижного состава на участке железной дороги; рассмотреть зарубежную практику применения объектов средств контроля подвижного состава на участке железной дороги; провести ретроспективный анализ структуры, динамики и использования аппаратуры КТСМ-02; изучить методологию оценки эффективности использования аппаратуры КТСМ-02; исследовать эффективность использования составных элементов аппаратуры КТСМ-02; выявить проблемы, возникающих в процессе функционирования аппаратуры КТСМ-02; разработать комплекс мероприятий и выделить основные направления совершенствования по повышению эффективности использования объектов средств контроля подвижного состава на участке железной дороги, а именно КТСМ-02. В данном дипломном проекте рассматривается оборудование комплексами КТСМ-02 участка Видибор – Горынь. Устройство буксового узла Буксовым узлом называется устройство с подшипниками, обеспечивающее трансформацию вращательного движения колесной пары в поступательное перемещение вагона, с минимальным сопротивлением. 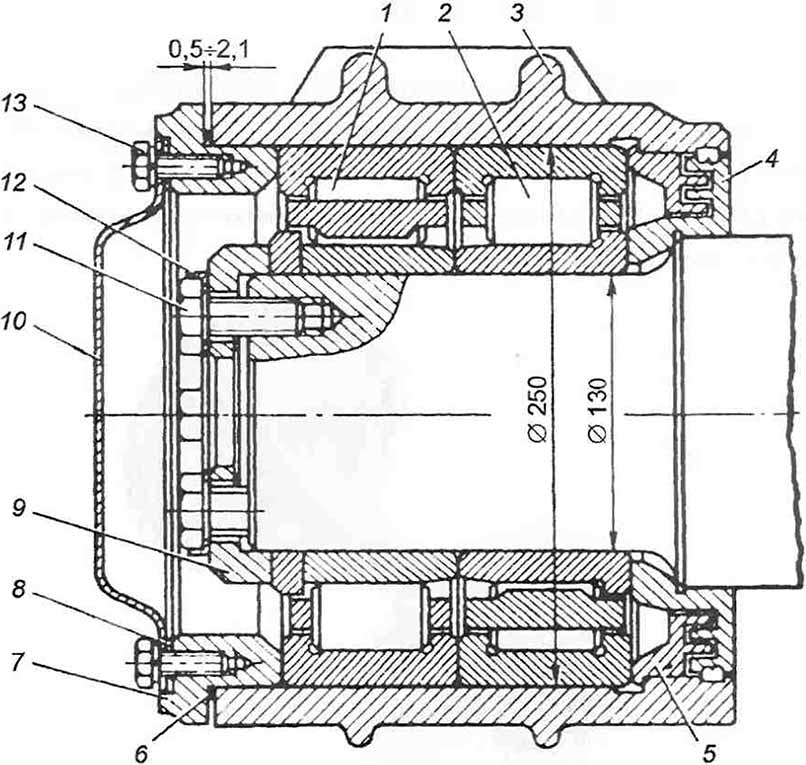 Рисунок 1.1 – Буксовый узел Корпус буксы (3) предназначен для размещения элементов буксового узла и смазки. Конструкция корпуса буксы определяется схемой опирания рамы тележки на буксовый узел. Лабиринтное кольцо (4) и лабиринтная часть (5) корпуса, образуя четырехкамерное бесконтактное уплотнение, препятствуют вытеканию смазки из буксы и попаданию в нее механических примесей. Крепительная крышка (7) фиксирует наружные кольца подшипников и герметизирует корпус буксы с наружной стороны. Смотровая крышка (10) предназначена для осмотра на пунктах технического обслуживания переднего подшипника и контроля состояния смазки, а также обеспечения обточки колесной пары без демонтажа букс. Роликовые подшипники (1 и 2) являются главной составной частью буксового узла, а все остальные элементы для обеспечения их надежной работы.  Рисунок 1.2 – Общий вид роликовых подшипников Опыт эксплуатации буксовых узлов показал, что главными причинами выхода из строя (отказов) являются допускаемые нарушения технологи и при подборе и монтаже роликовых подшипников на шейку оси, а также несовершенства элементов корпуса буксы. 2 оСОБЕННОСТИ РАСПОЛОЖЕНИЯ ПРИЕМНИКОВ ИНФРАКРАСНОГО ИЗЛУЧЕНИЯ Рассмотрим основные особенности применения различных технических средств КТСМ. Как известно, в аппаратуре контроля нагрева букс ПОНАБ-КСТМ-01,ДИСК-КТСМ-01Д и ДИСК2 приемники инфракрасного (ИФ) излучения ориентированы на поверхность крышки буксового узла и частично н верхнюю цилиндрическую( попутную относительно движения поезда) часть корпуса буксы. 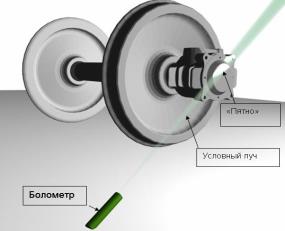 Рисунок 2.1 - Трёхмерная геометрическая модель для определения зоны корпуса буксы, сканируемой болометром при проходе колёсной пары Результаты натурного эксперимента, в котором лазер имитировал «взгляд» приемника инфракрасного излучения напольной камеры, показывают, что при проходе колесной пары ориентированный стандартным образом приемник инфракрасного излучения фактически сканирует, в основном смотровую крышку и частично крепительную крышку буксы, при этом наиболее нагретая часть – корпус буксы не попадает в зону обзора. Проведенные ведущими инженерами НПЦ «Инфотекс» исследования показали, что ориентация на крышку недостаточно информативна ввиду сложности юстировки оптики, удаленности приемника ИК и меньшего нагрева крышки, чем у корпуса буксы. Полученные выводы говорят о том, что в качестве зоны тепловой диагностики подшипников целесообразно использовать корпус буксы, так как приемник инфракрасного сигнала получал бы более мощный сигнал, который пропорционален температуре нагрева наружных колец подшипников. Поскольку верхняя часть корпуса буксы может быть не доступна для прямого сканирования (эта зона частично закрыта рамой тележки или открыта бортами платформ), то целесообразно использовать наиболее нагретую – нижнюю доступную часть корпуса буксы. Результаты исследований и анализ зарубежных решений по ИК диагностике буксовых узлов позволили НПЦ «Инфотекс» предложить для аппаратуры 5-го поколения более совершенный вариант ориентации болометра с установкой напольной камеры прямо на подошву рельса, реализованный в новой модели КТСМ-02Б.  Рисунок 2.2 - Модель, демонстрирующая обзор буксы приемником ИК-излучения в КТСМ-02 При ориентации приемника ИК-излучения на нижнюю цилиндрическую част корпуса буксы в сечении между передним и задним подшипниками с креплением напольной камеры непосредственно к подошве рельса как в аппаратуре КТСМ-02Б, обеспечивается: формирование более мощного (в 1,5…1,8 раза) теплового сигнала; стабильность положения напольной камеры с приемником ИК-излучения относительно корпуса буксы; наименьшее расстояние до поверхности корпуса буксы; исключение ложных показаний аппаратуры на рабочий нагрев шкивов и редукторов привода подвагонных генераторов, на прямое и отражённое от букс излучение. Описание аппаратуры КТСМ-02 Комплекс КТСМ-02 является микропроцессорной многофункциональной системой автоматического контроля технического состояния железнодорожного подвижного состава. Комплекс КТСМ-02 состоит из перегонного (постового и напольного оборудования) концентратора информации КИ-6М и автоматизированного рабочего места оператора (АРМ ЛПК), размещённых на станции. Главное назначение комплекса заключается в координации работы подключенных к нему подсистем, а также в обеспечении информационного взаимодействия системы в целом через систему передачи данных с централизованными средствами сигнализации, регистрации, отображения и накопления результатов контроля. В состав комплекса технических средств входят перегонное оборудование, устанавливаемое на подходах к станции и станционное оборудование, устанавливаемое в станционных служебных помещениях дежурных по станции или пунктов технического обслуживания вагонов. Перегонное оборудование включает в себя: постового оборудования, установленного в помещении поста контроля; напольного оборудования, которое крепится к элементам пути или устанавливается в непосредственной близости от железнодорожного полотна; кабельного хозяйства, предназначенного для осуществления взаимодействия между напольными устройствами и постовым оборудованием. Перегонное оборудование осуществляет контроль технического состояния различных элементов подвижного состава, производит цифровую обработку полученной информации о проконтролированном поезде и посредством каналов связи передает ее на станцию или ПТО, а также в АСК-ПС. Станционное оборудование включает в себя: персональную электронно-вычислительную машину (ПЭВМ) с программным обеспечением автоматического рабочего места линейного пункта контроля (АРМ ЛПК) и встроенной подсистемой речевого оповещения ПРОС-1(ПРОС-1М); концентратор информации (КИ-6М), предназначенный для обеспечения информационного обмена с перегонным оборудованием, который, при организации распределенной сети передачи данных линейных предприятий, также обеспечивает связь между перегонным оборудованием и автоматизированной системой контроля подвижного состава (АСК-ПС); источник бесперебойного питания. На станции АРМ ЛПК производит регистрацию, отображение, накопление и хранение информации о результатах контроля технического состояния подвижного состава, а в случаях обнаружения дефектов, угрожающих безопасности движения, формирует визуальные, тональные и голосовые сигналы оповещения. В процессе работы комплекс обрабатывает сигналы путевых датчиков( датчиков прохода осей Д1-Д4 и рельсовой цепи наложения(далее РЦН)) с целью определения текущей дислокации осей и подвижных единиц контролируемого поезда в зонах контроля.  Рисунок 3.1 – Структурная схема КТСМ-02 Если движение поезда осуществляется в направлении от датчика 1 к датчику 4,то такое направление движение является правильным. Для двухпутных участков это направление является основным направлением движения. Противоположное направление движения является неправильным. Комплекс осуществляет определение дислокации подвижных единиц в обоих направлениях движения. Обрабатывая сигналы путевых датчиков,ПК-05 формирует и передает подсистемы контроля по интерфейсу CAN сообщения в режиме реального времени о заходе и выходе колесных пар в каждую из зон контроля. Информация, содержащаяся в сообщениях, используются подсистемами для управления работой датчиков контроля технического состояния подвижного состава. Одновременно ПК-05 принимает по интерфейсу CAN от подсистем сообщения, содержащие результаты контроля технического состояния подвижного состава, и помещает их в буфер накопления информации. После включения питания или приема удаленной команды "сброс" между ПК-05 и оборудованием передачи данных СПД устанавливается обмен информацией. При нормальной работе комплекса, средств СПД и АРМов между ПК-05 и каждым АРМов устанавливается так называемое "виртуальное соединение",т.е. выполняются все условия для нормального информационного обмена между ними. При установленном виртуальном соединении и при наличии информации в буфере соответствующего АРМа ПК-05 передаст эту информацию через виртуальное соединение этому АРМу. При установленном виртуальном соединении ПК-05 и АРМ периодически контролируют целостность соединения. Если в течении установленного времени удержания соединения ПК-05 не получает от АРМа команды проверки целостности соединения, то виртуальное соединение считается разорванным. В этом случае информация, предназначенная для этого АРМа, начинает накапливаться в буфере. Время удержания соединения задается командой от АРМа и может быть установлена каждым АРМом индивидуально. Если между ПК-05 и АРМом не установлено виртуального соединения, то информация, генерируемая как самим комплексом, так и подсистемами контроля накапливается во внутреннем буфере ПК-05.Информация в буфере конкретного АРМа может быть утеряна в следующих случаях: виртуальное соединение было потеряно более чем на 12 часов; буфер виртуального соединения переполнился; после получения специальной команды от АРМа. В случае аппаратного или программного рестарта ПК-05 2 Функциональные узлы КТСМ-02 2.1 Контроллер периферийный (ПК-05) Блок ПК-05 – это микропроцессорная система, функционально состоящая из согласующего устройства (СУ) и узла микроконтроллера (МК). Он обеспечивает ввод и обработку сигналов от путевых датчиков, а также информационный обмен и координацию работы подсистем контроля, работающих в составе комплекса. Кроме того, ПК-05 отвечает за информационное взаимодействие КТСМ-02 с централизованными средствами сигнализации, регистрации, отображения и накопления результатов контроля через систему передачи данных (СПД)[5]. Согласующее устройство СУ содержит модули гальванической развязки (МГР-М), датчиков формирования сигналов счета осей (МФДО) и формирования сигналов рельсовой цепи наложения (РЦН) тональной частоты (МФРЦ). Посредством МФРЦ осуществляются питание рельсовой цепи наложения РЦН напряжением +12 В, ввод и преобразование сигнала с выхода РЦН в дискретный сигнал, а также гальваническая развязка между цепями РЦН и дискретными линиями ввода–вывода. Модуль МФДО вводит и преобразует сигналы от датчиков фиксации прохода колесных пар типа ДМ-95 в дискретные сигналы напряжения, обеспечивает гальваническую развязку между электрическими цепями датчиков и цепями ввода–вывода. С помощью МГР-М обеспечивается питание дискретных цепей первого и второго контуров гальванической развязки. Модули МР1 и МР2 в стандартный комплект поставки не входят, а устанавливаются для увеличения числа подсистем контроля, при этом информационный обмен с базовой системой осуществляется по локальной сети CAN. Узел микроконтроллера состоит из модулей ВИП и МЦМК, объединенных отдельной соединительной панелью, а также ПТ, подключаемого к модулю МЦМК. Модуль ВИП обеспечивает питание модуля МЦМК и технологического пульта. Модуль МЦМК осуществляет: - прием информации от клавиатуры и вывод информации на индикатор ПТ, а также генерацию звукового сигнала с помощью пьезоэлектрического излучателя ПТ; - прием и передачу данных в локальную сеть CAN; - прием и передачу данных в линию (канал) связи по интерфейсам V23 и RS-232С; - прием и передачу данных по интерфейсу связи с ВУ; - прием и обработку дискретных сигналов от устройства контроля питания фидеров; - прием и обработку дискретных сигналов, формируемых модулями МФРЦ и МФДО; - управление порогом срабатывания формирователя сигнала модуля МФРЦ. - прием и обработку сигнала от датчика температуры наружного воздуха. Основой модуля МЦМК является микроконтроллер, выполняющий обработку входных сигналов, а такж выдачу управляющих воздействий в соответствии с программным обеспечением (ПО), записанным во внутренней памяти микроконтроллера. Цифровой датчик температуры наружного воздуха ДТНВ-2А (рисунок 2.1), смонтированный в аспирационном контейнере, устанавливается вне помещения поста КТСМ и подключается к микроконтроллеру. В зависимости от изменения температуры окружающей среды результаты измерения датчика ДТНВ-2А используются для автоматической коррекции работы тепловых трактов с учетом температур внутри напольных камер КНМ-05, активного и пассивного излучателей на заслонке. Эта функция реализована в новом программном обеспечении АРМ-ЛПК, ЦПК-АСК-ПС версии 2.0.7.6 и 2.0.8.0 с более совершенными алгоритмами обработки данных о тепловом состоянии буксовых подшипников по шкале градусов Цельсия.  Рисунок 2.1 - ДТНВ в аспирационном контейнере Технологический пульт предназначен для ввода и отображения информации, а также подачи звуковых сигналов. С его помощью электромеханик контролирует работу комплекса КТСМ, тестирует состояние его элементов и др[5]. 2.2 Блок управления напольными камерами (БУНК) Блок БУНК представляет собой микропроцессорную систему, состоящую из узла управления (УУ), функции которого выполняет модуль управления и связи (МУС), и двух силовых узлов напольных камер левого (СУЛК) и правого (СУПК). Силовые узлы состоя из двух модулей МКК и МИП, которые объединяются с модулем МУС соединительной панелью. Модули МКК производят коммутацию переменного напряжения 220 В, 50 Гц на понижающих трансформаторах внутреннего и наружного обогревов напольных камер (Т1,Т3 и Т2,Т4 соответственно), осуществляя при этом контроль протекающего тока, а так же обеспечивают гальваническую развязку силовых и сигнальных цепей. 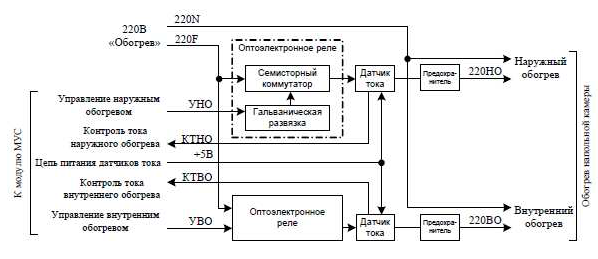 Модуль коммутации и контроля осуществляет включение и выключение обогрева напольных камер, под управлением модуля МУС, и выдачу аналогового, гальванически развязанного, сигнала прямо-пропорционального току контроля протекающему в коммутируемых цепях. |