1. 1 Технология расформирования составов на сортировочных станциях
 Скачать 1.68 Mb. Скачать 1.68 Mb.
|

2.2 Напольные устройства2.2.1 Управление стрелочным электроприводам СПГБ-4БЭлектропривод СПГБ-4Б относятся к категории электромеханических невзрезных приводов с внутренним замыканием и бесконтактным автопереключателем. Максимальное усилие перевода – 2000 Н (200кгс); габаритные размеры – 780 х 995 х 255 мм; масса – не более 170 кг. Привод может устанавливаться с любой стороны стрелки. Время перевода 0.55-0.58 с. Уменьшенное передаточное число редуктора (35,7). На смену электродвигателям постоянного тока типа ДПС (МСП) и асинхронным двигателям трехфазного переменного тока типа МСА (МСТ) пришли двигатели ЭМСУ – электродвигатель малогабаритный стрелочный универсальный. ЭМСУ имеет электронное управление и работает как от постоянного, так и от переменного тока, а также может регулироваться частота вращения ротора. ЭМСУ разработан на базе вентильно - индукторного двигателя. Номинальная частота вращения ротора в зависимости от типа стрелочного перевода может настраиваться как на заводе-изготовителе, так и в условиях эксплуатации при помощи переносного пульта или ноутбука. Электродвигатели типа ЭМСУ не требуют технического обслуживания в течение 7 лет. Двигатели ЭМСУ-СПГ выпускаются запрограммированными на 3600 ± 15% об/мин и рассчитаны для работы в условиях умеренно-холодного климата (УХЛ), при рабочих температурах от минус 60°С до плюс 50°С, влажности не более 95% при температуре плюс 25°С[6]. Для повышения быстродействия в схеме управления приводом не используют реверсирующее реле, время срабатывания которого 0,15 - 0,2 с, а контрольные реле подключают к контактам автопереключателя, минуя тыловые контакты нейтрального пускового реле, имеющего замедление на отпускание якоря 0,2 - 0,25 с[7]. Использование бесконтактного автопереключателя (рисунок 2.4) повышает ресурс электропривода СПГБ-4Б до 106 срабатываний, но требует изменения контрольной цепи. В крайнем (плюсовом) положении стрелки один из двух рычагов автопереключателя попадает в вырезы контрольных линеек, и связанный с ним ротор датчика соединяет магнитный поток питающей катушки 1 с сигнальной обмоткой 3 (2 – вспомогательная катушка). В обмотке наводится напряжение не менее 65 В, достаточное для притяжения якоря контрольного реле ПК. Другой рычаг автопереключателя находится на поверхности контрольных линеек, и связанный с ним ротор датчика замыкает магнитопроводы питающей 1' и вспомогательной 2' катушек. Последняя увеличивает сопротивление и уменьшает ток питания датчика. В сигнальной катушке 3' индуцируется напряжение (не более 3,5 В), недостаточное для срабатывания соответствующего контрольного реле МК.  Рисунок 2.4 – Принципиальная схема бесконтактного автопереключателя Быстрый износ контактов пусковых реле в рабочей цепи стимулировал использование тиристоров для коммутации тока электродвигателя. 2.2.2 Комплексированная защита горочных стрелокДля защиты стрелок от несвоевременного и несанкционированного перевода в современных системах ГАЦ используется не менее двух устройств, которые работают на разных физических принципах. Причиной этого стало то, что каждый из таких устройств не обеспечивает требований достоверного обнаружения подвижного состава из-за характерных им недостатков: ГРЦ не исключают опасного отказа (потери шунта) если отсутствуют средства диагностики и контроля работоспособности, не контролируется проход длиннобазных вагонов, поверхность катания рельсов загрязнена или произошел пробой изолирующих стыков; РТД-С имеют недостаточную длину зоны контроля, ограниченную началом остряков; ИПД плохо защищены от обрыва ИД волочащимися частями вагонов или при выполнении путевых работ; УСО-М контролируют наличие подвижного состава путем ведения логической модели проследования осей колесных пар без физического взаимодействия с ними на протяжении всего стрелочного участка. Комплексированная защита стрелок (КЗС) представляет собой совокупность двух или нескольких датчиков, решающих одну задачу, объединенных устройством совместной обработки сигналов и принятия решений для формирования интегрального (общего) сигнала управления стрелкой. Структурные связи между комплексируемыми датчиками выбираются с учетом максимального использования их преимуществ и минимизации (или компенсации) недостатков каждого из них. Структурная схема защиты горочных стрелок предполагает совместную работу ГРЦ, РТД-С и ИПД. Каждый из датчиков имеет свое исполнительное реле ИС, РТДС, ИП, контактами которых включается общее путевое реле СП. В качестве вспомогательного средства защиты могут рассматриваться точечные датчики индуктивного действия УСО-М со схемами логической обработки сигналов (рисунок 2.5).  Рисунок 2.5 – Структурная схема существующей КЗС Технические средства КЗС в соответствии с классификацией напольных устройств должны обнаруживать подвижной состав любого типа с момента вступления его первой колесной пары на предстрелочный участок и до момента выезда последней колесной пары за пределы остряков стрелки. При выборе технических средств комплексирования учитываются: непрерывность контроля обнаруживаемого отцепа в стрелочной зоне; независимость характеристик обнаружения от скорости движения отцепа; надежность и всепогодность; возможность дистанционного контроля работоспособности. Отказ любого датчика в составе КЗС приводит исполнительное устройство в защитное состояние. При этом устройства КЗС должны обеспечивать вероятность ложной свободности не хуже 10-6-10-7, а вероятность ложной занятости не хуже 10-4-10-5. 2.2.3 Индуктивно-проводной датчикИндуктивно-проводной датчик, используемый на сети железных дорог России, относится к категории технических средств защиты стрелок горочной автоматической централизации от несанкционированного перевода под вагонами. Он равным образом может использоваться в системах контроля заполнения путей как датчик обнаружения отцепов на сортировочных путях. Наиболее существенными современными требованиями, предъявляемыми к датчикам обнаружения подвижного состава в системах автоматизации сортировочных горок, являются: обнаружение любых типов грузовых вагонов, эксплуатируемых на сети железных дорог как неподвижных, так и движущихся в диапазоне скоростей от нуля до 40 км/ч в пределах контролируемого участка; обеспечение непрерывного тестирования и диагностики работоспособности с прогнозированием предотказных состояний; минимизация ошибок обнаружения и непрерывный физический контроль перемещения всех типов грузовых вагонов. При этом зона обнаружения, отсчитываемая по положению первой и последней оси отцепа, должна быть не меньше нормативной длины контролируемого участка, например, стрелочного. Датчик ИПД обнаруживает подвижной состав в зоне укладки индуктивного шлейфа (ИШ) вне зависимости от климатических и других эксплуатационных условий. Для защиты стрелок ГАЦ используются ИШ, уложенные в форме «прямоугольника» или «восьмерки». Их размеры выбираются в зависимости от размеров стрелочного участка. Границы укладывания индуктивных шлейфов жестко привязаны к границам контролируемого участка, что обеспечивает сопряжение длины зоны обнаружения датчика и нормативной длины контролируемого стрелочного участка. Контроль наличия подвижного состава с помощью ИПД основан на оценке изменения частоты настройки автогенератора гармонических колебаний. Индуктивный шлейф является чувствительным элементом датчика, выполняющим роль колебательного контура автогенератора и изменяющим параметры при наличии подвижного состава в зоне укладки шлейфа. Любой из датчиков обнаружения подвижного состава, эксплуатируемых на сети железных дорог России, а именно на стрелочных участках, характеризуется инерционностью. Инерционность при появлении в зоне контроля объекта определяется временем анализа, необходимым для фиксации факта обнаружения, временем принятия решения по результатам анализа и исполнения команды исполнительным элементом. С целью исключения риска перевода стрелки под движущимися вагонами важно определить эту инерционность и согласовать длины зон обнаружения датчика и контролируемого участка. Для ИПД эти длины согласуются с помощью смещения границ укладки индуктивного шлейфа относительно острия остряков стрелки. Анализ эксплуатации ИПД свидетельствует, что с момента входа первой колесной пары отцепа на границу укладки шлейфа его обнаружение происходит с запаздыванием по времени. Поскольку скорости движения отцепов на сортировочных горках могут изменяться в большом диапазоне, момент фиксации (обнаружения) занятости стрелочного участка может находиться дальше границы защитного участка нормативной зоны контроля горочной стрелки. В результате стрелка может перевестись под вагоном. Чтобы это исключить, необходимо выбрать границы укладки шлейфа относительно границ стрелочного участка с учетом параметров, определяющих инерционные свойства ИПД. В состав ИПД входит аппаратура, располагающаяся в зависимости от функционального назначения в релейном помещении или на поле. В релейном помещении находятся предохранители в цепях питания датчика и реле типа НМШ2-4000, воспринимающие сигналы от электронного блока (ЭБ). БЭ устанавливается в трансформаторном ящике ТЯ ИПД, который, в свою очередь, ставят в границах предстрелочного участка. Место расположения ТЯ ИПД выбирается по местным условиям в начале, середине или конце участка и ближе к трассе кабеля. Исполнительное реле ИП, воспринимающее сигналы от БЭ, и предохранители цепей питания ИПД находятся на посту ГАЦ (рисунок 2.6)[8].  Рисунок 2.6 – Включение ИПД в схему управления стрелкой ГАЦ Роль чувствительного элемента датчика выполняет индуктивный шлейф, уложенный в пределах рельсовой колеи и изменяющий свои параметры при наезде отцепа. Он располагается внутри железнодорожной колеи в пределах контролируемого участка и крепится к шейке рельсов, изготавливается на месте установки и содержит катушку индуктивности, образованную из 7 жил кабеля КВВГ 7x1.5. Концы кабеля заводятся в путевой ящик, где жилы кабеля распределяются на клеммной колодке в катушку индуктивности. Шлейф крепится к подошве рельсов при помощи крепежных скоб (рисунок 2.7). Для защиты от механических повреждений кабель помещен в резинотканевый рукав. На сортировочных станциях используют разную длину индуктивных шлейфов исходя из конкретной решаемой задачи. В системе защиты стрелок применяют шлейфы, размеры которых зависят от конкретных размеров предстрелочного участка и не превышают 6 м. В системе КЗП длины шлейфов выбирают с учётом геометрических размеров подвижных единиц, и они равны 22 м. При этом частота генератора в устройствах защиты стрелок равна 45 или 60 кГц, в КЗП – 30 или 40 кГц. Индуктивный шлейф должен крепиться к шейке рельсов в каждом шпальном ящике, в местах установки накладок шлейф должен крепиться скобами к каждой шпале. 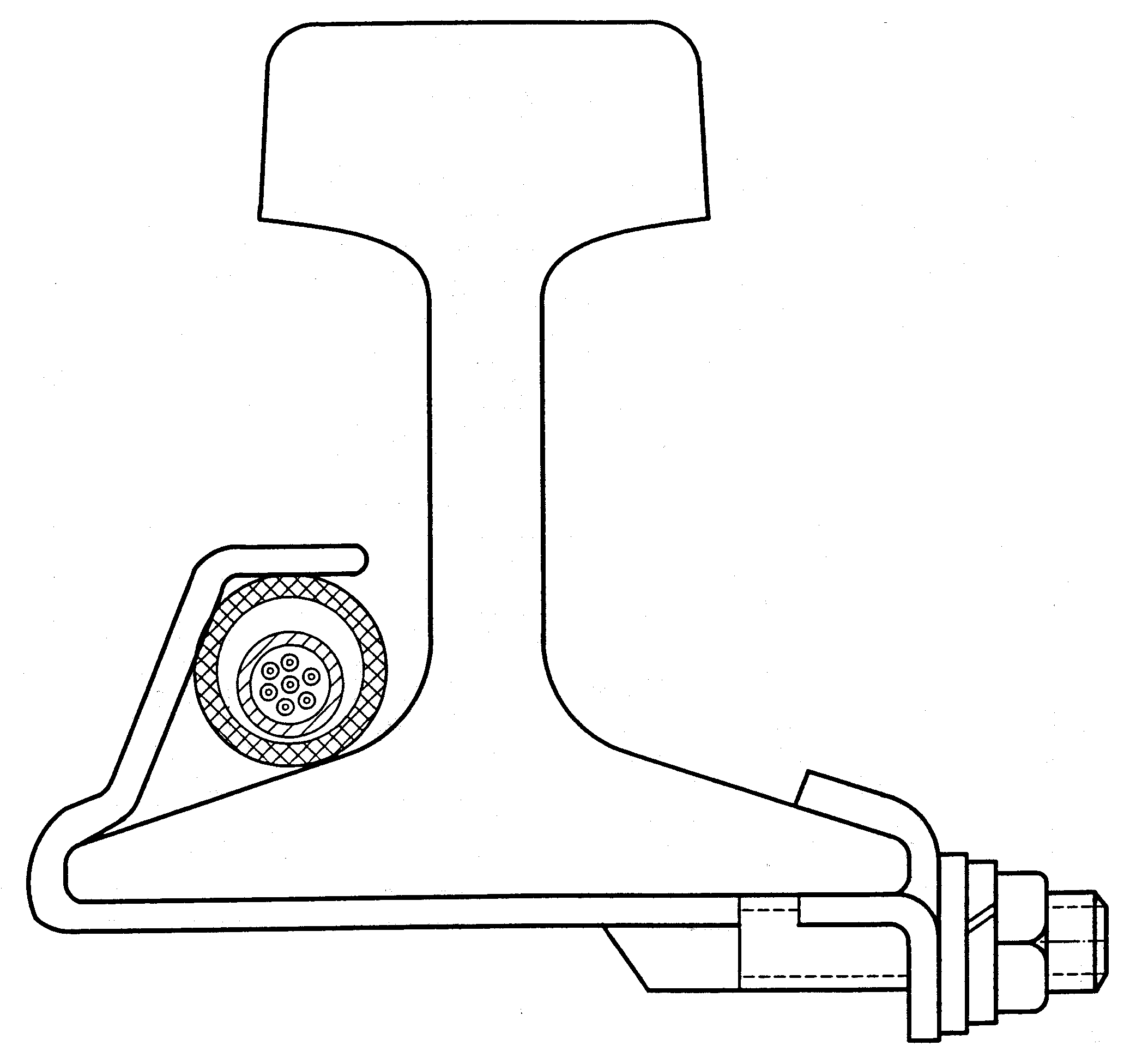 Рисунок 2.7 – Крепление шлейфа ИПД ИПД обеспечивает контроль свободности или занятости участков пути в пределах уложенного шлейфа от подвижного состава с металлической ходовой частью. Принцип контроля подвижного состава основан на изменении частоты и амплитуды генератора гармонических колебаний датчика под действием металлической массы вагона. На рисунке 2.8 изображен принцип регистрации занятия участка контроля.  Рисунок 2.8 – Принцип регистрации занятия участка контроля При свободности этого участка генератор гармонических колебаний выдает на вход порогового устройства сигнальную частоту (синусоидальной формы установленной частоты и амплитуды). Далее пороговое устройство формирует сигнал управления выходным каскадом генератора и на выход БЭ в нагрузку поступает сигнал постоянного тока напряжением примерно 24 В на нагрузке 1440 Ом. При занятости контролируемого участка возможно уменьшение добротности колебательного контура датчика и амплитуды сигнала генератора или полное прекращение колебаний. В любом случае формируется сигнал управления выходным каскадом. В результате сигнал на нагрузке пропадает, это и фиксируется исполнительным элементом.  Блок электроники состоит из генератора гармонических колебаний, порогового устройства, контрольной схемы, схемы автоподстройки, выходного каскада. Схема автоподстройки необходима для стабилизации работы генератора гармонических колебаний. На рисунке 2.9 изображена функциональная схема блока электроники ИПД. Блок электроники состоит из генератора гармонических колебаний, порогового устройства, контрольной схемы, схемы автоподстройки, выходного каскада. Схема автоподстройки необходима для стабилизации работы генератора гармонических колебаний. На рисунке 2.9 изображена функциональная схема блока электроники ИПД.Рисунок 2.9 – Функциональная схема блока электроники ИПД В реальных условиях на рамку ИШ действует не только металлическая масса вагона, но и климатические факторы (в частности, влажность). В результате амплитуда колебаний генератора датчика может изменяться, в то время как порог срабатывания датчика остается постоянным. Это может привести либо к «пропуску» базы вагона, либо к выдаче ложного сигнала занятости. Поэтому в преобразователе датчика реализована схема стабилизации амплитуды колебаний генератора датчика. Эту функцию выполняет схема автоподстройки. Принцип ее действия основан на том, что в цепь отрицательной обратной связи (ООС) генератора введено регулирующее звено, которое изменяет глубину ООС в зависимости от изменения амплитуды колебаний в ИШ генератора датчика. Регулирующее звено состоит из цифроаналогового преобразователя (ЦАП), работающего в следящем режиме. Выходной сигнал Uс генератора гармонических колебаний поступает на вход ЦАП и вход компаратора К3. На другой вход К3 подается опорное напряжение Uоп3, которое и определяет величину выходного сигнала на выходе генератора. Если сигнал Uс на входе К3 выше опорного, то на его выходе формируется сигнал, дающий команду на вычитание числа в реверсивном счетчике. При этом сигнал с выхода ЦАП увеличит уровень ООС генератора и сигнал Uс на его выходе уменьшится. Уменьшение сигнала будет происходить до тех пор, пока он не станет меньше Uоп3. После этого на выходе компаратора формируется сигнал, дающий команду на сложение числа в реверсивном счетчике. В этом случае сигнал с выхода ЦАП уменьшает величину ООС генератора и сигнал на его выходе увеличивается. Напряжение на входе компаратора К3 возрастает на величину  , где n – число разрядов ЦАП, и компаратор вновь даст команду на вычитание. С каждым следующим тактом компаратор будет выдавать команду либо на сложение, либо на вычитание, а величина выходного сигнала – синхронно изменяться. , где n – число разрядов ЦАП, и компаратор вновь даст команду на вычитание. С каждым следующим тактом компаратор будет выдавать команду либо на сложение, либо на вычитание, а величина выходного сигнала – синхронно изменяться.Для контроля работоспособности ИПД электронный блок имеет контрольную схему, которая выдает сигнал об исправности, если величина сигнала в контрольной точке КТ, определяющая работоспособность ИПД, не превышает заданной величины. В противоположном случае контрольная схема блокирует выходной каскад, и напряжение на исполнительное реле ИП не поступает. Для обеспечения условия безопасности работы ИПД контрольная схема ЭБ работает в импульсном режиме. Электронный блок выдает напряжение постоянного тока +24 В, которое питает исполнительное реле. Контроль работоспособности ИПД осуществляется визуально светодиодом «Выход». Конструктивно-электронный блок представляет собой объемную конструкцию, внутри которой расположены две съемные печатные платы. На одной плате (модуль ЭМ1) — источник питания, генератор синусоидальных колебаний и генератор импульсов, а на второй (модуль ЭМ2) — элементы схемы автоподстройки контрольной схемы (схема выходного каскада). На верхних панелях помещены элементы настройки и индикации, вывод контрольной точки. При выключении питания ИПД переходит в режим «Занятость» независимо от состояния контролируемого участка. Если питание прерывается на время не более 2 минут, то ИПД восстанавливает свою работоспособность. Если питание прерывается на время более 2 минут, то ИПД переходит в режим «Занятость». Для приведения ИПД в работоспособное состояние необходимо настроить ИПД в соответствие с требованием руководства по эксплуатации. Инерционность ИПД с момента обнаружения отцепа при входе в зону укладки шлейфа до момента размыкания контактов исполнительного реле определяется следующими факторами: временем анализа, необходимым датчику для регистрации факта обнаружения вагона по реализуемому частотному критерию - 62,5 мс; временем, необходимым для формирования выходным каскадом сигнала управления реле - 20 мс и размыкания контактов исполнительного реле НМШ2-4000 - 38 мс. Таким образом, суммарное время инерционности ИПД при регистрации занятости участка и использовании реле этого типа составляет 120,5мс. При выходе последней колесной пары отцепа из зоны действия датчика также регистрируется факт освобождения участка с инерционностью. В этом случае инерционность ИПД определяется следующими факторами: временем анализа, необходимым датчику для регистрации факта завершения обнаружения по реализуемому частотному критерию - 187,25 мс; временем, необходимым для формирования выходным каскадом сигнала управления реле - 20 мс и временем замыкания контактов при срабатывании исполнительного реле НМШ2-4000 -139 мс. Суммарное время инерционности ИПД при регистрации свободности для этого реле составляет 346,5 мс. На сети железных дорог датчик ИПД со шлейфом в форме «прямоугольника» эксплуатируется на стрелочных участках, оборудованных, как правило, нормально разомкнутой рельсовой цепью. Отцеп контролируется с момента входа на границу защитного участка, которая может совпадать с изолирующим стыком ИС1, и до выхода за последний изолирующий стык ИС2 рельсовой цепи. При этом индуктивный шлейф прокладывают лишь в зоне защитного участка и остряков, так как шлейф находится в зоне влияния вторичного контура, образованного рельсовой цепью до момента выхода последней оси отцепа за границу рельсовой цепи. В результате длина зоны обнаружения ИПД больше нормативной зоны контроля стрелочного участка и превышает геометрические размеры самого шлейфа (рисунок 2.10).  Рисунок 2.10 – Границы зоны обнаружения со шлейфом в форме «прямоугольника» При неисправности аппаратуры рельсовой цепи (например, от рельсов отключен питающий трансформатор) или ее отсутствии длина зоны обнаружения намного меньше нормативной длины стрелочного участка и соизмерима с границами укладки шлейфа. Кроме того, при кратковременном пропадании шунта в момент нахождения последней оси отцепа вне зоны укладки шлейфа ИПД может регистрировать свободность участка контроля. ИПД со шлейфом в форме «восьмерки» контролирует отцеп с момента входа на защитный участок и до корня остряков стрелочного перевода независимо от наличия и состояния рельсовой цепи стрелочного участка, а именно, ее исправности или отключении от рельсов питающего трансформатора. Проведенные на ряде горок эксплуатационные испытания показали, что границы зоны обнаружения отцепов не изменяются при работе ИПД со шлейфом «восьмерка» на стрелочных участках, оборудованных нормально разомкнутой рельсовой цепью. Это является достоинством работы ИПД со шлейфом в форме «восьмерки» в отличие от шлейфа в форме «прямоугольника». Ш  лейф ИПД в форме «восьмерки» (рисунок 2.11) позволяет достичь высоких эксплуатационных показателей при использовании стрелочных участков на электрифицированных путях, а также при комплексировании с любыми типами рельсовых цепей. лейф ИПД в форме «восьмерки» (рисунок 2.11) позволяет достичь высоких эксплуатационных показателей при использовании стрелочных участков на электрифицированных путях, а также при комплексировании с любыми типами рельсовых цепей.Рисунок 2.11 – Шлейф ИПД в форме «восьмерки» 2.2.4 Радиотехнический датчикРельсовая цепь не исключает перевода стрелки под длиннобазным вагоном, у которого расстояние между осями внутренних колес превышает длину стрелочной рельсовой цепи. Это вызывает необходимость дополнения стрелочных рельсовых цепей радиотехническими датчиками [10]. Радиотехнический датчик контроля свободности стрелочных участков (РТД-С) предназначен для фиксации наличия отцепов на стрелочных участках сортировочных горок в системах ГАЦ. РТД-С состоит из передатчика и двух приемников. Для осуществления контроля в РТД-С используется радиоканал сверхвысокочастотного (СВЧ) диапазона. Использование СВЧ диапазона волн вызвано тем, что влияние запыленности, тумана, дождя, снега на волны этого диапазона тем меньше, чем больше неравенство  > > ( - длина волны излучаемого колебания, - радиус частиц метеорологического происхождения). ( - длина волны излучаемого колебания, - радиус частиц метеорологического происхождения).В соответствии со своим назначением РТД могут работать в двух режимах пространственного обнаружения транспортных средств – приема отраженного сигнала (канал отраженного сигнала КОС) и экранирования подвижным составом излучаемого передатчиком сигнала (канал прямого сигнала КПС). РТД-С состоит из двух основных, конструктивно одинаковых, модулей - приемного и передающего. Передающий модуль РТД включает следующие функциональные схемные узлы (рисунок 2.12): рупорная пирамидальная антенна А1; генератор СВЧ (ГСВЧ); стабилизатор тока ГСВЧ (СТ); модулятор М; генератор модулирующих сигналов ГМС; схема индикации И.  Рисунок 2.12 – Функциональная схема передающего модуля РТД Однако с учетом необходимости использования малогабаритных антенн для радиотехнических датчиков был выбран трех сантиметровый диапазон волн (f=10-109 Гц). Антенна передатчика служит для преобразования токов СВЧ, создаваемых ГСВЧ, в энергию электромагнитных волн, излучаемых в сторону контролируемой зоны. ГСВЧ трехсантиметрового диапазона волн выполнен с использованием лавинно-пролетного диода (ЛПД). Стабилизатор тока СТ предназначен для ограничения амплитудного значения тока, протекающего через ЛПД. Генератор модулирующих сигналов ГМС вырабатывает импульсы прямоугольной формы и вместе с модулятором М осуществляет 100% амплитудную модуляцию СВЧ-сигнала. Наличие модулирующего сигнала контролируется схемой индикации И. Приемный модуль РТД имеет следующие функциональные блоки (рисунок 2.13): рупорная пирамидальная антенны А2; детекторная камера Д; усилитель-ограничитель УО; схема индикации И; пороговое устройство ПУ на триггере Шмитта; схема сравнения СС; фазоинверсные каскады ФИ1 и ФИ2; выходное устройство ВУ.  Рисунок 2.13 – Функциональная схема приемного модуля РТД Антенна приемника А2 предназначена для приема и преобразования энергии электромагнитных волн в напряжение СВЧ и аналогична антенне передатчика. Детекторная камера Д представляет собой отрезок прямоугольного волновода с установленным в нем в качестве детектора полупроводниковым СВЧ-диодом КД421А, который преобразует радиоимпульсы в видеоимпульсы. После детектирования сигнал подается на вход усилителя-ограничителя УО. УО приемника усиливает электрические колебания модулирующей частоты, выделяемых детектором из СВЧ-сигнала. С выхода УО сигнал синусоидальной формы поступает на ПУ, где с помощью триггера Шмитта происходит его преобразование в прямоугольные импульсы положительной полярности. Для повышения помехоустойчивости сигнал с выхода триггера Шмитта подается на делитель частоты с коэффициентом деления n=10, а затем на один из входов схемы сравнения СС. Одновременно на другой вход СС приходит сигнал управления от дополнительного приемника. При наличии сигналов на двух входах СС сигнал через фазоинверсные каскады ФИ1 и ФИ2 поступает на выходное устройство ВУ. Его трансформатор и выпрямитель обеспечивают включение исполнительного элемента ИЭ – контрольного реле РТДС. В системах ГАЦ РТД-С должны: фиксировать все типы вагонов, включая длиннобазные, на любых скоростях движения, в том числе неподвижные, с момента вступления первой колесной пары отцепа за изолирующий стык предстрелочного участка и до нахождения последней колесной пары отцепа на остряках стрелки; обеспечивать дистанционный контроль своей работоспособности как при наличии отцепа на стрелочном участке, так и при его отсутствии в зоне контроля; работать при автономной тяге и при наличии рядом расположенных путей, оборудованных электротягой постоянного и переменного тока. РТД-С состоит из двух основных, конструктивно одинаковых, модулей - приемного и передающего. Модули устанавливают на крепежные стойки, расположенные в зоне стрелочного участка. Приемник, установленный внизу стойки, является основным и используется для контроля всех типов вагонов с хребтовой балкой, а верхний приемник дополнительно фиксирует длиннобазные вагоны без нее (рисунок 2.14).  Рисунок 2.14 – Размещение РТД-С в зоне стрелочного участка Рисунок 2.14 – Размещение РТД-С в зоне стрелочного участкаУчитывая технические требования к РТД-С, длину стрелочного участка и реальные габариты подвижного состава, производят выбор места расположения устройства в плане для обеспечения достоверности обнаружения отцепа в заданных границах зоны контроля. Главными требованиями при выборе координат размещения крепежных стоек РТД-С на стрелочном участке являются: - въезд первой оси колесной пары на границу предстрелочного защитного участка должен быть зарегистрирован как занятость стрелки; - выезд последней оси колесной пары вагона за остряки должен быть зарегистрирован как освобождение участка контроля. 2.2.5 Рельсовые цепиРельсовые цепи 25 Гц проектируют на вновь механизируемых и автоматизируемых сортировочных горках, а также в случае их реконструкции и в маневровых районах станций при любых видах тяги. Питание рельсовых цепей 25 Гц производится от преобразователя частоты ПЧ 50/25-150 УЗ с допустимым колебанием выходного напряжения 110 В частотой 25 Гц от 105 до 115 В. Сопротивление жил кабеля между постом ГАЦ и трансформаторным ящиком (предельная длина недублированного кабеля 1000 м) составляет 50 Ом. При соблюдении требований и норм, предъявляемых к горочным рельсовым цепям, нормально разомкнутые рельсовые цепи 25 Гц обеспечивают: – время с момента наложения шунта до размыкания фронтовых контактов обратного повторителя путевого реле СП при наибольшем напряжении контрольной батареи 28 В не более 0,15 с, а время с момента снятия шунта до замыкания фронтовых контактов обратного повторителя путевого реле СП при наименьшем напряжении контрольной батареи 22 В не более 0,35 с; – надежное притяжение якоря путевого реле ИС при наложении на рельсовую цепь нормативного поездного шунта сопротивлением 0,5 Ом с максимальным сопротивлением изоляции  и минимальным выходным напряжением 105 В, 25 Гц; и минимальным выходным напряжением 105 В, 25 Гц; – надежное отпускание якоря реле ИС при снятии нормативного поездного шунта с рельсовой цепи с минимальным сопротивлением изоляции  Ом и максимальным выходным напряжением 115 В, 25 Гц. Ом и максимальным выходным напряжением 115 В, 25 Гц.Н  ормально разомкнутые рельсовые цепи, в которых не контролируется исправность элементов и рельсовых нитей, находят применение на сортировочных горках в качестве путевых датчиков. На рисунке 2.15 изображена схема нормально разомкнутой рельсовой цепи. ормально разомкнутые рельсовые цепи, в которых не контролируется исправность элементов и рельсовых нитей, находят применение на сортировочных горках в качестве путевых датчиков. На рисунке 2.15 изображена схема нормально разомкнутой рельсовой цепи.Рисунок 2.15 – Схема нормально разомкнутой рельсовой цепи Напряжение контрольной батареи для работы обратного повторителя путевого реле П должно составлять 22-28 В. Напряжение питания ГРЦ контролируется реле 1В типа АСШ2-110 на выходе каждого преобразователя ПЧ50/25-150УЗ со стороны напряжения 110 В частотой 25 Гц. На электрифицированных путях и трех ГРЦ, примыкающих к ним, для защиты импульсного стрелочного путевого реле И типа ИВГ (ИМВШ-110) от влияния тягового тока устанавливают фильтры ФП типа ФП-25. При свободной РЦ вторичная обмотка ПТ нагружена на сопротивление изоляции (минимум 3 Ом). В контуре первичной обмотки устанавливается ток, которого недостаточно для срабатывания путевого реле ИС. В момент шунтирования рельсов (нормативный шунт 0,5 Ом) ток в контуре вторичной обмотки возрастает, что приводит к увеличению тока в контуре первичной обмотки и срабатыванию путевого реле ИС. Резистор Ro ограничивает ток при малых сопротивлениях поездного шунта и соединительных проводов контура вторичной обмотки ПТ [7]. В системах ГАЦ рельсовые цепи имеют специфические особенности: относительно малая длина; наличие предстрелочного участка (для стрелочных РЦ); повышенная шунтовая чувствительность и быстродействие; устойчивость при пониженном сопротивлении балласта[18]. Длина РЦ определяет интервал между скатывающимися отцепами, и чем он меньше, тем выше может быть скорость роспуска. В общем случае длина стрелочной горочной РЦ  составляется из отрезков: от изолирующих стыков до начала остряков (предстрелочный участок составляется из отрезков: от изолирующих стыков до начала остряков (предстрелочный участок  ); от начала остряков до изолирующих стыков перед крестовиной стрелки ); от начала остряков до изолирующих стыков перед крестовиной стрелки  . На рисунке 2.16 Показана длина ГРЦ и допустимый интервал между отцепами. . На рисунке 2.16 Показана длина ГРЦ и допустимый интервал между отцепами. Рисунок 2.16 - Длина ГРЦ и допустимый интервал между отцепами Предстрелочный участок необходим для обеспечения полного перевода стрелки до вступления отцепа на ее остряки, если начало перевода сошлось с моментом вступления отцепа на данную РЦ. Длина этого участка определяется по формуле:  , (2.1) , (2.1)где  – скорость движения отцепа; – скорость движения отцепа; – время перевода стрелки; – время перевода стрелки; – время реакции путевого реле на наложение шунта. – время реакции путевого реле на наложение шунта.Необходимость обеспечения быстродействия ГРЦ определяется условиями безопасности при максимальном темпе роспуска составов. Предположим, что длина выбрана без учета , то этой длины может быть не достаточно для того, чтобы стрелка полностью перевелась до вступления на ее остряки первой колесной пары отцепа.Похожая ситуация будет при автовозврате стрелки, если команда на автовозврат поступит прямо перед моментом окончания времени . Следовательно для уменьшения длины предстрелочного участка одновременно с повышением быстродействия стрелочных электроприводов уменьшают время реакции путевого реле на наложение шунта.На сортировочных горках занятость путевых участков должна надежно фиксироваться при нахождении на них хотя бы одной колесной пары при условии того, что головки рельсов могут быть загрязнены. При этом переходное сопротивление зачастую достигает 0,5 Ом и выше, что может привести к кратковременной потере шунта. В этих условиях ГРЦ должны обеспечивать высокую шунтовую чувствительность (0,5 Ом). ГРЦ определяет интервал между скатывающимися отцепами и, чем он меньше, тем выше может перерабатывающая способность горки. Минимально допустимый интервал  между отцепами определяется по формуле: между отцепами определяется по формуле: , (2.2) , (2.2)где – время реакции путевого реле на шунтирование ГРЦ, с; – время перевода стрелки, с; – время прохождения отцепа по стрелочному участку , с; – время прохождения отцепа по стрелочному участку , с; – время реакции путевого реле на снятие шунта с ГРЦ, с (см. рисунок 2.16). – время реакции путевого реле на снятие шунта с ГРЦ, с (см. рисунок 2.16).С целью увеличения перерабатывающей способности горки уменьшают , снижая значения всех его составляющих за счет: и – применения быстродействующих ГРЦ; – применения быстродействующих стрелочных электроприводов; – сокращения длины стрелочных участков.Таким образом, в системах ГАЦ к коротким РЦ предъявляют дополнительные требования по быстродействию, что связано с работой стрелок в режиме автовозврата и недопустимости даже кратковременной потери шунта при проследовании ТС по контролируемому участку. Отцеп должен быть обнаружен независимо от состояния балласта и загрязнения контактных частей рельсов и колесных пар. 2.2.6 Устройство счета осейПрименение недорогих (но надежных в работе), не требующих частой подстройки УСО резко снижает нормы трудозатрат на обслуживание напольных устройств, повышает качество работы модели сортировочной горки, что в свою очередь открывает широкие возможности для точного отслеживания всех передвижений, обеспечивая автоматический съем информации как о скатывании вагонов на спускной части сортировочной горки, так и накоплении их в подгорочном парке. УСО предназначено для фиксации осей и определения направления движения вагонов, контролировать исправность элементов устройства. Устройство считывания осей состоит из: первичного датчика, состоящего из трех катушек индуктивности, размещаемых в одном корпусе, который закрепляется на рельсе, и преобразователя сигналов (ПС), размещаемого в напольном ящике вблизи пути (рисунок 2.17).  Рисунок 2.17 – Устройство счета осей Датчик предназначен для фиксации осей вагонов, следующих по участку, ограниченному ИД и передачи информации на управляющий вычислительный комплекс, размещаемый на посту электрической централизации[19]. Электропитание ИД осуществляется от сети переменного тока частотой 50 Гц напряжением 36 + 4 В. Потребляемый ток не более 0,05А.Первичный преобразователь датчика представляет собой совокупность трех катушек индуктивности без сердечника КИ1, КИ2, КИ3. Причем, две катушки КИ1 и КИ3 (рабочие), располагаются в корпусе горизонтально, их плоскости намотки параллельны рельсу, а третья К2 (вспомогательная) располагается между ними и ее плоскость перпендикулярна плоскости других катушек индуктивности. Катушки К1 и К3 служат для обнаружения колесных пар, а катушка К2 контролирует положение ИД относительно рельса. Вследствие этого преобразователь сигнала датчика строится по трехканальной схеме (рисунок 2.18).  Рисунок 2.18 – Функциональная схема УСО-М Два канала ПС, рабочие, выполняют функции счетчиков осей движущегося вагона. Они практически симметричны и включают: резонансные каскады РК1 и РК3, компараторы сигналов К1 и К3, дискретные делители частоты сигнала Д1 и Д3, каскады оптоэлектронной развязки О1 и О3, индикаторы состояния каналов И1 и И3, и выходные цепи передачи сигналов на пост ЭЦ –СЧ1 и СЧ2. Третий канал выполняет в основном функции контроля работоспособности датчика и включает в себя те же функциональные узлы, что и основные каналы. Выходной сигнал вспомогательного канала представляет собой дискретный сигнал частотой 1 Гц, транслируемый на пост ЭЦ с выхода КИ - «Контроль исправности». Ориентация катушек индуктивности датчика такова, что колесные пары вагона поочередно проезжают над катушкой КИ1, а затем над катушкой КИ3 в одном направлении, либо наоборот при обратном движении. В момент проезда колесной пары над соответствующей катушкой, регистрируется сигнал с соответствующего счетного выхода одного из каналов СЧ1, или СЧ2. При этом в случае регистрации равенства въехавших и выехавших осей через счетную точку, принимается решение о наличии либо отсутствии транспортного средства в зоне контроля. Помимо названной функции датчик позволяет фиксировать и направление движения транспортного средства, в зависимости от очередности во времени появления счетных импульсов с выхода первой или второй катушек КИ1 или КИ3. В преобразователе сигналов имеется автогенератор опорного сигнала с кварцевой стабилизацией частоты. В исходном состоянии с выхода кварцевого генератора в каждый канал ПС датчика через делитель ДЧ, на вход резонансных каскадов РК1,РК2 и РК3 поступает сигнал опорной частоты. Резонансные контура каскадов образованы индуктивностями катушек КИ, КИ2, КИ3 и собственными емкостями, которыми в процессе установки и настройки датчика подстраивают контура в резонанс или вблизи него. Эти сигналы с выходов резонансных каналов поступают на соответствующие компараторы, выполняющие функции пороговых элементов и при достаточном уровне сигнала транслируются через делители частоты Д1, Д2, Д3 и каскады оптоэлектронной развязки О1-О3 одновременно на встроенные индикаторы И1,И2,И3 и на соответствующие выходы в линию связи. Таким образом в исходном состоянии на каждом счетном выходе СЧ1 и СЧ2 как и на контрольном, в линию на пост ЭЦ транслируются переменные дискретные сигналы, свидетельствующие о работоспособном состоянии датчика и отсутствии колесных пар вагона в зоне действия датчика. Одновременно в ПС светятся индикаторы И1-И3, один из которых мигает – И2 с частотой 1 Гц. Эта индикация предназначена для контроля функционирования датчика электромехаником. При въезде колесной пары вагона в зону действия одной из катушек, например КИ1, изменяется начальная настройка резонансного контура РК1, и напряжение на его выходе, подаваемое на вход компаратора К1,уменьшается до величины, приводящей к его закрытию. Вследствие этого пропадает импульсный сигнал на счетном выходе СЧ1, гаснет индикатор И1, что свидетельствует о наличии колесной пары вагона в зоне катушки К1. При выезде колесной пары из зоны действия катушки КИ1, настройка резонансного контура РК1 восстанавливается, напряжение на входе компаратора К1 открывает его и на выходе этого канала возобновляется трансляция переменного дискретного сигнала. Аналогично функционирует и другой рабочий канал, образованный катушкой КИ3. На посту ЭЦ в управляющем вычислительном комплексе ведется обработка поступающих с датчиков сигналов по алгоритму счета осей колесных пар, определению направления движения отцепа, занятости или свободности контролируемого участка. Следует заметить, что работа вспомогательного канала, регистрирующего исправное состояние датчика не прекращается и при въезде колесной пары в зону действия датчиков, благодаря начальной настройке функциональных узлов компаратора. 2.2.7 Горочные светофорыГорочные светофоры устанавливаются в районе вершины горки. Показания горочного светофора, который сигнализирует желтым, зеленым, желто-зеленым, красным огнями и буквой «Н» (осаживание назад) маршрутного указателя, определяют темп (скорость надвига) составов. Горочными светофорами в автоматическом режиме управляет КВГ. Для маневровых передвижений на пути сортировочного парка светофоры дополняют лунно-белыми огнями. Передвижение из сортировочного парка к вершине горки регулируют маневровые светофоры, которые используют и для ограждения замедлителей при проведении ремонтных работ. В «ручном» режиме горочными светофорами управляет дежурный по горке посредством группы блокированных кнопок, при нажатии которых включаются реле сигнальных показаний Ж, З и Н. Схема включения ламп светофоров обеспечивает, кроме включения указанных сигнальных показаний, сигнализацию желтым огнем при перегорании лампы зеленого огня и красным огнем при перегорании лампы желтого огня[1]. 2.2.8 СкоростемерыВ основу работы горочного радиолокационного индикатора скорости РИС-В3М положен эффект Доплеpа, состоящий в том, что при перемещении источника СВЧ колебаний по отношению к наблюдателю и наоборот частота колебаний в месте наблюдения отличается от собственной частоты источника колебаний. Генеpиpуемый приемопередающим модулем СВЧ сигнал, излучается антенной в направлении движущегося объекта и этой же антенной пpинимается отpаженный от объекта сигнал. Доплеpовская частота выделяется приемопередающим модулем и в виде гаpмонических колебаний поступает в блок обработки, где усиливается, фильтpуется, преобразуется в цифровой вид, обрабатывается в цифровом виде, а затем вновь преобразуется в аналоговый вид и уже в форме периодического сигнала прямоугольной формы поступает на выход РИС-В3М. В скоростемере РИС-В3М реализован алгоритм скользящего, быстрого преобразования Фурье (БПФ). Минимальная длительность периода доплеровской частоты равна 0,4 мс, частота соответствует 2,5 кГц и определяется максимальной скоростью отцепа 10 м/с = 36 км/ч. (1м/с = 3,6 км/ч). Максимальной длительности периода доплеровской частоты Tдоп=14,8 мс, соответствует частота 67,6 Гц, что соответствует минимальной скорости отцепа 0,27 м/с (1 км/ч). Время анализа (счета) БПФ составляет 4 мс. Т.е. на выходе скоростемера всегда формируется усредненная оценка скорости на интервале 74 см с постоянным ее обновлением каждые 4 мс. За это время очередная оценка обновленной доплеровской частоты существенно измениться не может. На самом деле при максимальной скорости движения отцепа 8,5 м/с за 4 мс отцеп может проехать путь, равный 3,4 см. Поскольку зона действия скоростемера начинается примерно за 3 – 4 м от замедлителя, то уже до въезда отцепа в замедлитель на выходе РИС-В3М появляется устойчивый сигнал в виде доплеровской частоты импульсной формы, соответствующий фактической скорости движения вагона. Начало обработки сигнала скоростемера в УВК привязывается к моменту въезда первой колесной пары отцепа на рельсовую цепь замедлителя либо на точечный датчик счета осей, устанавливаемый не далее 1 м от начала замедлителя. РИС-В3М устойчиво pаботает в условиях воздействия вибpационных нагpузок в диапазоне частот от 10 до 70 Гц с ускоpением до 3,8 g, а также сохpаняет pаботоспособность в любых атмосферных условиях: дождь, туман, иней, pоса. Диапазон измеpяемых скоpостей РИС-В3М от 1,5 до 35 км/ч. При необходимости, программным путем диапазон измеряемых скоростей может быть расширен до диапазона от 0,4 до 46 км/ч. Излучение СВЧ сигнала антенной РИС-В3М не пpедставляет опасности для эксплуатационного персонала, при соблюдении правил эксплуатации. 2.2.9 Вагонные замедлителиВагонные замедлители предназначены для регулирования скорости движения отцепов посредством их торможения на спускной части горки и на подгорочных сортировочных путях. Основным типом рекомендуемых устройств являются балочные вагонные замедлители, которые создают условия для торможения вагонов, воздействуя на боковые поверхности колес. На первой и второй тормозных позициях устанавливаются замедлители КЗ-5. Замедлитель вагонный клещевидный КЗ-5 предназначен для регулирования скорости движения отцепов при роспуске вагонов на механизированных и автоматизированных сортировочных горках и может устанавливаться, как на строящихся, так и на реконструируемых сортировочных станциях. Он представляет собой специальное балочное тормозное устройство, состоящее из двух независимых тормозных нитей по пять звеньев, смонтированных на деревянных брусьях и устанавливаемое на путях сортировочных горок. По принципу действия относится к нажимным тормозным устройствам с пневматическим приводом секций [23]. Технические характеристики замедлителя: тормозная мощность (погашаемая энергетическая высота) при номинальном давлении воздуха в пневмосети, при торможении, не менее: а) 92-тонного вагона– 1,4 мэв; б) 180-тонного вагона–1,1 мэв; число ступеней торможения– 4; габаритные размеры (длина´ширина´высота)–12,5´3,7´0,9 м; максимальное замедление при торможении вагонов– 4,0 м/с2; допустимая скорость входа вагонов на замедлитель– 8,5 м/с; время срабатывания при номинальном давлении воздуха не более: а) при торможении– 0,8 с; б) при снятии торможения– 0,7 с; расход воздуха на одно затормаживание не более 1,28 м3; Наиболее широко применяемым на сети дорог России на сегодняшний день является парковый рычажно-нажимной замедлитель типа РНЗ-2М, пришедший на смену замедлителю РНЗ-2. РНЗ-2М состоит из трех замедлителей длиной около 3 метров каждый, расположенных на расстоянии 2,5 – 3 м друг от друга. При управлении РНЗ-2М в заторможенное состояние приводится вся тормозная система – одновременно все три замедлителя. Технические характеристики: тормозная мощность– 0,45 мэв; число ступеней торможения– 4; расход воздуха на одно затормаживание – 0,18 м3; габаритные размеры (длина´ширина´высота)– 3,6´4,1´0,5 м; допустимая скорость входа вагонов на замедлитель– 6 м/с; время срабатывания при номинальном давлении воздуха не более: а) при торможении– 0,7 с; б) при снятии торможения– 0,6 с; 2.2.10 Контроль заполнения путейПовышение эффективности и ускорение формирования составов на сортировочных горках в значительной мере связаны с проблемой контроля заполнения путей подгорочного парка. В настоящее время этот контроль ведется с помощью устройств КЗП, выполняющих функции определения длины свободного пробега отцепа от парковой тормозной позиции до стоящих на пути вагонов. Наличие информации о степени и характере заполнения сортировочных путей позволяет сформировать и передать по стандартным каналам связи эту информацию оператору, а также в АСУ СС и маневровому диспетчеру с тем, чтобы скорректировать план (последовательность) роспуска составов с учетом заполнения путей сортировочного парка. Поскольку основным элементом любой системы КЗП являются напольные устройства, то к ним на основе обобщения отечественного и зарубежного опыта определены основные требования: фиксировать присутствие вагонов на контролируемых участках пути в условиях пониженного сопротивления изоляции (балласта) независимо от сопротивления рельсовой линии и переходного сопротивления «рельс-колесо»; контролировать присутствия вагонов на отдельном участке сортировочного пути независимо от наличия вагонов на смежных участках; использовать минимальное число жил кабеля, то есть иметь двухпроводные или четырехпроводные (при наличии резерва) физические линиям связи с центральным устройством; не препятствовать механизированной уборке снега и очистке пути, а также механизированной подбивке балласта; быть простой в обслуживании и не требовать привлечения эксплуатационного штата высокой квалификации; обеспечивать циклический опрос состояний всех контролируемых участков сортировочных путей (время обновления информации не должно превышать 1с), хранение данных о текущем состоянии путей и передачу их на центральный пост по последовательному каналу связи. Все известные отечественные устройства КЗП по принципу работы могут быть разделены на два типа: одни их них для формирования сигнала используют в своей структуре рельсовые нити; другие построены на основе независимых датчиков обнаружения движущихся отцепов. На Российских железных дорогах широко используются КЗП методом импульсного зондирования. |