1. Фигура и размеры Земли. Геоид, эллипсоид вращения, референцэллипсоид
 Скачать 3.3 Mb. Скачать 3.3 Mb.
|

|
6. Судовая РЛС. Принцип работы, разрешающая способность, факторы, влияющие на работу и точность РЛС. Радиолокацией называется обнаружение, определение координат и параметров движения различных объектов (целей), отражающих или излучающих радиоволны. Комплекс радиоэлектронных устройств, выполняющих эту задачу, называется радиолокационной станцией (РЛС) или радиолокатором. РЛ-объектом или целью может быть любое физическое тело, электрические свойства которого отличаются от окружающей среды. Электромагнитная энергия сигналов, излучаемая передающей антенной, распространяясь в заданном направлении, отражается от того или иного объекта, расположенного на пути распространения радиоволн, и принимается приёмником. С выхода приёмника усиленные сигналы поступают в индикатор, где преобразуются в форму, удобную для получения информации о принятых сигналах. Рлс с активным ответом (на объекте радиолокационный ответчик – приёмопередатчик) позволяет опознать цель по кодированным ответным сигналам. В зависимости от структуры зондирующих сигналов различают 2 метода РЛ-обнаружения: непрерывного излучения колебаний и импульсный метод. Импульсная РЛС периодически излучает кратковременные импульсы колебаний СВЧ, а в промежутках принимает отражённые от объектов импульсные сигналы, запаздывающие на время Разрешающая способность РЛС характеризует возможность раздельного обнаружения и определения координат нескольких целей, находящихся на определённом расстоянии друг от друга. Разрешающая способность по дальности численно равна минимальному расстоянию между двумя раздельно обнаруживаемыми объектами, расположенными в одном направлении. Раздельное обнаружение сигналов от этих объектов возможно при условии, что отражение от объекта 1 закончится ранее, чем поступит сигнал от объекта 2.  Поскольку отражение от 1 длится в течение τи, а сигнал от 2 запаздывает на время На крупномасштабных шкалах разрешающая способность РЛС по дальности приближается к потенциальной; на мелкомасштабной РСД уменьшается и будет зависеть главным образом от dэ. В обоих случаях на dп влияет качество фокусировки луча на ЭЛТ. Разрешающая способность по направления (азимуту) оценивается минимальным значением угла α между направлениями на 2 равноудалённых объекта 1 и 2, при котором отражённые сигналы от этих объектов будут приниматься раздельно. α - потенциально разрешающий угол. Чем меньше α, тем выше РСН. α практически равен ширине диаграммы направленности антенны в горизонтальной плоскости α = α гор. Реальная разрешающая способность по направлению будет заметна хуже из-за влияния ЭЛТ индикатора. α о = α + α инд. α инд – равен угловым размерам диаметра пятна: Следовательно по мере приближения отметки цели к началу развёртки РСН ухудшается. Основное уравнение радиолокации: Следовательно Dmax зависит от импульсной мощности передатчика, чувствительности приёмника, направленности антенны (GA), ЭПО объекта (Sэ). Водная поверхность оказывает влияние на работу РЛС из-за отражения электро-магнитной энергии от подстилающей поверхности, а также вследствие сферичности Земли, ограничивающей дальность РЛ-обнаружения. Сигналы РЛС достигают объекта и отражаются обратно двумя путями: прямым путём и путём отражения от водной поверхности. Суммарное поле объекта оказывается неравномерным и в пределах диаграммы направленности антенны в вертикальной плоскости ности лепестковый характер. Число лепестков n зависит от высоты hантенны и длины волны Влияние атмосферы выражается в следующем: из-за атмосферной рефракции радиоволны отклоняются от прямолинейного распространения; поглощается и рассеивается энергия радиоволн в сантиметровом и миллиметровом диапазоне. Атмосферная рефракция, т. е. преломление радиоволн в нижних слоях атмосферы возникает вследствие того, что давление и температура воздуха медленно убывает с высотой. Это в свою очередь уменьшает диэлектрическую проницаемость воздуха и вызывает увеличение скорости распространения радиоволн с ростом высоты. Траектории радиолучей искривляются в направлении земной поверхности и дальнейшее действие РЛС повышается. При резком падении температуры может возникнуть субрефракция – искривление радиолучей вверх. Затухание радиоволн, вызванное дождём, туманом, снегом, происходит по двум причинам. Во-первых, капли вода в атмосфере – несовершенный диэлектрик для сантиметровых волн и поэтому возбуждаемый в каплях ток СВЧ создаёт тепловые потери энергии. Во-вторых, при значительных размерах водяных капель имеет место отражение и рассеяние радиоволн. Затухание зависит также от плоскости завесы, формы частичек, температуры (чем больше воды в тумане, тем хуже видимость и меньше дальность действия РЛС). Дожди вызывают заметное ослабление дальности действия РЛС. Отражение энергии в сторону РЛС, вызываемое дождём, часто бывает значительным – мерцающее свечение на экране. Дождевые облака – светлые пятна на экране. Град и снег по сравнению с дождём вызывает меньшее поглощение энергии. 7. Морские единицы длины и скорости. Поправка и коэффициент лага. Определение пройденного расстояния по РОЛ. Метрическая система неудобна для измерений расстояний на море, так как в процессе судовождения приходится решать задачи, связанные с измерением углов и угловых расстояний. Для референц-эллипсоида Красовского длина одной минуты такой дуги выражается следующей формулой: Δ = 1852,23 – 9,34cos2Φ Стандартная морская миля соответствует длине минуты меридиана референц-эллипсоида Красовского на широте 440 18’. Она отличается от значений на полюсах и экваторе всего на 0,5%. Одна десятая часть морской мили называется кабельтов (кб) 1кб = 0,1 мили = 185,2 м За единицу скорости в морской навигации принят узел (уз) – 1уз = 1 миля/час. Переход от скорости в узлах к скорости в кабельтовых в минуту производится по формуле: Vкб/мин = Vуз/6 При расчетах, связанных со скоростью ветра, и в других случаях используется единица метр в секунду (м/с) – 1м/с = 2уз. Расстояние So от некоторого нуля фиксируется специальным счётчиком, а его мгновенное значение в данный момент называется отсчётом лага (ОЛ). Пройденное судном расстояние определяется с помощью относительного лага как разность между его последовательными отсчётами (РОЛ) в моменты времени, снятыми со счётчика лага: РОЛ = ОЛi+1 - ОЛi Лаг, как любой прибор, определяет скорость с погрешностью. Систематическая погрешность в показаниях лага может быть скомпенсирована поправкой лага Л, имеющей обратный знак. Такая поправка, выраженная в процентах, называется поправкой лага. Она рассчитана по следующим формулам и может иметь как положительный, так и отрицательный знаки: ΔЛ = (So – РОЛ)/РОЛ * 100% ΔЛ = (Vo – Vл)/ Vл * 100% So – фактически пройденное судном расстояние. Vo и Vл – скорости судна относительно воды и показанная лагом. Вместо поправки часто используют коэффициент лага: Кл = 1 + ΔЛ/100 = Sл/РОЛ Sл = РОЛ * Кл Скорость судна и правильность работы лага, то есть поправка лага, определяется на ходовых испытаниях. 8. Влияние значений параметров корпуса и руля судна на управляемость судна. На управляемость судна оказывают влияние параметры корпуса, к которым в первую очередь относятся: отношение длины к ширине L/B, коэффициент обшей полноты 6, дифферент, а также форма кормовой оконечности, характеризуемая площадью кормового подзора (площадь подреза кормы) fк. Площадь fк ограничивается кормовым перпендикуляром, линией киля (базовой линией) иконтуром кормы. В качестве критерия подреза кормы можно использовать коэффициент σк; где d— средняя осадка, м. Параметр σк является коэффициентом полноты площади ДП. К параметрам руля, существенно влияющим на управляемость, относятся его площадь, форма и размещение. Форма руля характеризуется его относительным удлинением, определяемым по формуле, где h— высота руля по баллеру, м; Sp— площадь пера руля, м2. Рассмотрим отдельно влияние каждого из перечисленных параметров на управляемость. Отношение L/B. Увеличение отношения L/B приводит к росту сопротивления поперечному перемещению (росту поперечной гидродинамической силы Rv), что приводит к уменьшению угла дрейфа на циркуляции и, следовательно, к сохранению высокой линейной скорости, так как лобовое сопротивление при малых углах дрейфа возрастает незначительно. Кроме того, возрастает демпфирующее влияние гидродинамического момента mr, входящего в третье уравнение системы, что приводит к уменьшению угловой скорости w) (скорости изменения курса). Таким образом, суда с относительно большем отношением L/B обладают худшей поворотливостью и лучшей устойчивостью на курсе. 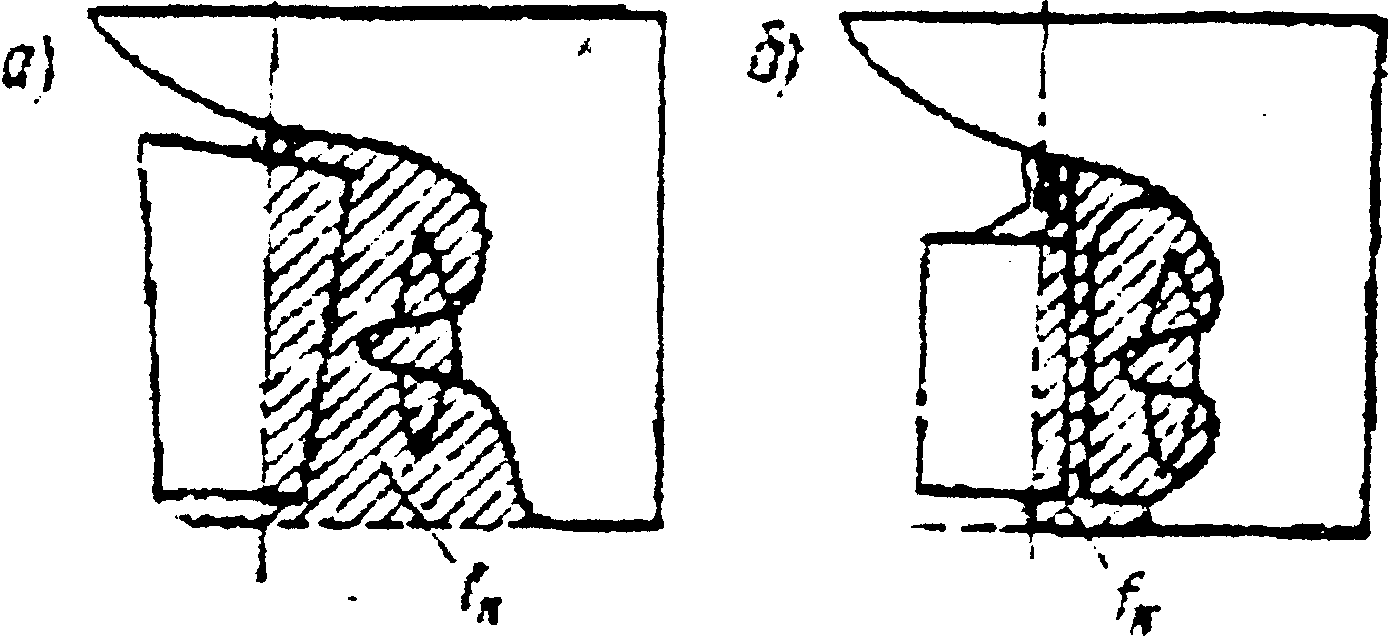 Коэффициент δ. Увеличение δ приводит к уменьшению силы Ry и уменьшению демпфирующего момента mr, а следовательно, к улучшению поворотливости и ухудшению устойчивости на курсе. Дифферент. Увеличение дифферента на корму приводит к смещению ЦБС от миделя в сторону кормы, поэтому возрастает устойчивость на курсе и ухудшается поворотливость. С другой стороны, дифферент на нос резко ухудшает устойчивость на курсе — судно становится рыскливым, что усложняет маневрирование в стесненных условиях. Рис. 2.6. К определению площади кормового подреза: а —корма с подвесным или полуподвесным рулем; б — корма с рулем за рудерпостом Коэффициент σк. Суда с большим σк (малая площадь кормового подреза fk) обладают худшей поворотливостью и лучшей устойчивостью на курсе. Площадь руля Sp. Увеличение Sp увеличивает поперечную силу руля Pру, но в то же время возрастает и демпфирующее действие руля. Практически получается, что увеличение площади руля приводит к улучшению поворотливости лишь при больших углах перекладки. Относительное удлинение руля λр. Увеличение λр при неизменной его площади Sp приводит к возрастанию поперечной силы руля, что приводит к некоторому улучшению поворотливости. Расположение руля. Если руль расположен в винтовой струе, то скорость натекания воды на руль возрастает за счет дополнительной скорости потока, вызванной винтом, что обеспечивает значительное улучшение поворотливости. Этот эффект особенно проявляется на одновинтовых судах в режиме разгона, а по мере приближения скорости к установившемуся значению уменьшается. На двухвинтовых судах руль, расположенный в ДП, обладает относительно малой эффективностью. Если же на таких судах установлены два пера руля за каждым из винтов, то поворотливость резко возрастает. 9. Включение РЛС. Основные органы управления РЛС. Контроль исправной РЛС. При выведенном усилении добиваются такой яркости экрана, чтобы линия развёртки стала едва заметной. Вводят изображение НКД и путём фокусировки делают их возможно более тонкими. Затем вводят усиление. Лучшим является такое положение ручки “усиления”, при котором по всей площади экрана появляется слабый мерцающий фон шумов приёмника, что соответствует максимальной чувствительности приёмника и позволяет обнаруживать объекты на максимальной дальности. Недостаточное усиление может привести к тому, что небольшие объекты, дающие слабые эхо-сигналы, не будут обнаружены. Судоводители часто уменьшают усиление для выделения сильных эхо-сигналов. Это то можно делать лишь в течение короткого промежутка времени, после чего должно быть восстановлено норм. усил. То же самое относится к просмотру части экрана с засветкой от сильных осадков. Следует следить за яркостью изображения, поскольку слабая яркость затрудняет наблюдение, а чрезмерная вызывает расфокусирование изображения. При переключении шкал дальности яркость необходимо подстраивать. Органы управления: ВАРУ- применяется при наличии засветки от морских волн в центре экрана. Следует помнить, что одновременно с подавлением сигналов от волн подавляются и сигналы от малых объектов. (Импульс меньшей длительности )- применяют на шкалах более крупного масштаба для уменьшения интенсивности помех от морского волнения. МПВ- уменьшение помех от дождя. “3-10 см” – длина волны. 10 см целесообразно использовать в комбинации с коротким импульсом для большого ослабления помех осадков. “ОД-ИД“- выбирают исходя из конкретных условий плавания. Выбор шкал дальности. РЛ наблюдение в открытом море следует вести преимущественно на шкалах среднего масштаба (8-16миль) с периодическим просмотром окруж. Обстановки на шкалах как более крупного, так и более мелкого масштаба. В стеснённых водах наблюдение рекомендуется вести исходя из обстоятельств плавания на шкалах более крупного масштаба с периодич. обзором на мелкомасштабных шкалах. 32-64 миль использ. для опр. места судна по мор. берегам. При расхождении с целями на близких расстояниях следует использовать крупномасштабные шкалы, на которых более точно оценив. степень опасности и быстрее обнаруж. манёвры целей. В режиме ОД наиболее просто и наглядно оценивать опасность столкновения и раньше обнаружить изменение ск-ти целей, идущих пересекающимися курсами. В режиме ИД раньше обнаруживаются малые неподвижные цели, нагляднее и проще выделяются цели движущиеся и неподвижные, раньше обнаруж. измен. курса встречными судами. В то же время в ИД сложнее оценка опасности столкновения и предполагаемой дист. расхождения. Наиболее употр.-ОД. При налич. на судне двух РЛС удобно один в ОД, 2 в ИД. Ориентация изображения. Наибольшую точность измерения пеленга, сопостовление РЛ-инф.с картой, упрощение расчётов обесп. режим ориентации “Север”. При работе в этом режиме следует после каждого изменения курса проверять согласование индикатора РЛС с ГК. В режимах “Курс” и “К-стабилизир”изображение на экране РЛС соответствует картине, соблюдаемой визуально с мостиком. Точность РЛ - пеленгования уменьш. 10. Локсодромия и её свойства. Аналитические выражения для вычисления локсодромического курса и расстояния по географическим координатам. Меркаторская картографическая проекция, её свойства. Кривую на поверхности Земли, пересекающую все меридианы под одним и тем же углом, называют локсодромией, что с греческого переводится как «косой бег». Расстояние между двумя точками на сфере по локсодромии не является кратчайшим и её применение в мореплавании объясняется исключительным удобством использования компасов. О  сновные свойства локсодромии: сновные свойства локсодромии:
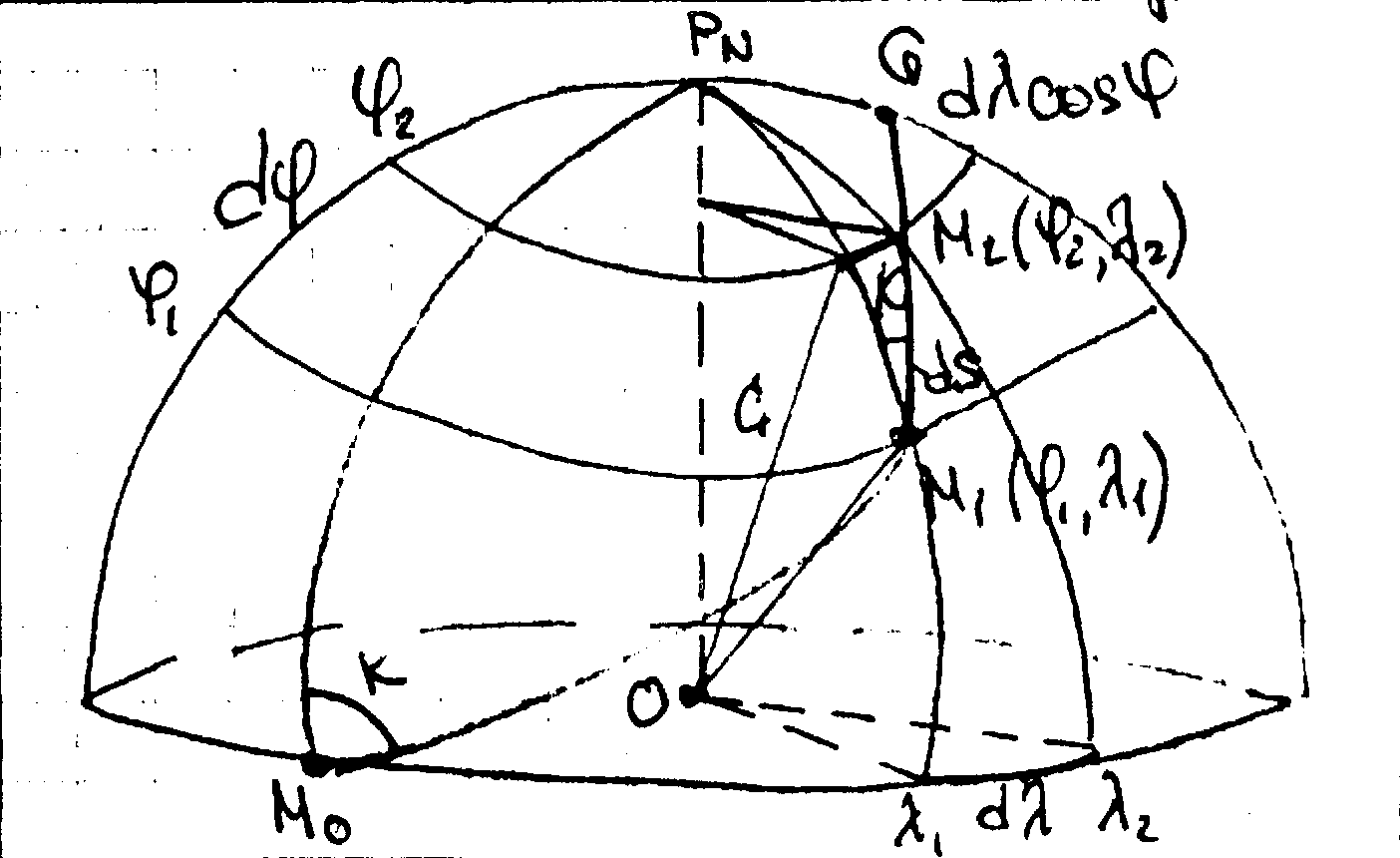 Уравнение локсодромии для эллипсоида: Более краткая запись выглядит так: г 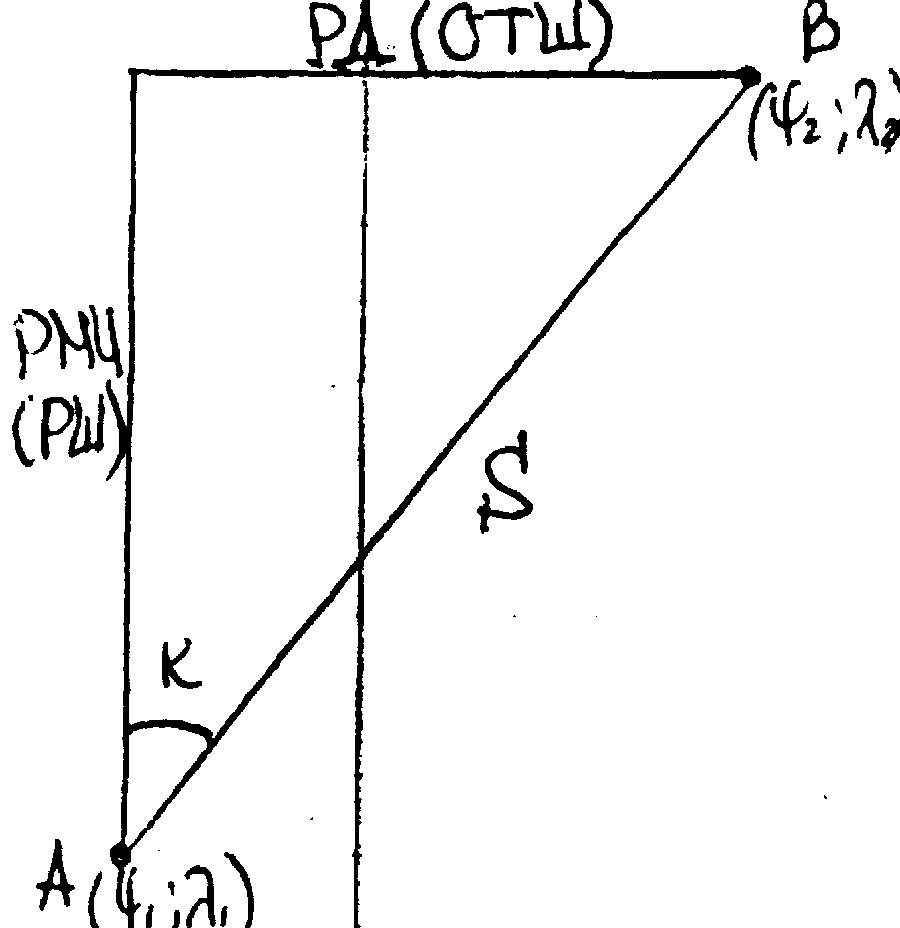 де V1,2 – изометрическая широта. де V1,2 – изометрическая широта.Меркаторская проекция относится к классу цилиндрических нормальных равноугольных проекций, в которых параллели нормальной сетки есть параллельные прямые, а расстояние между меридианами пропорциональны соответствующим разностям долгот. Основные этапы проектирования карты: 1-й этап: Осуществление геодезических измерений на поверхности Земли и их координатная привязка к конкретному референц-эллипсоиду. 2-й этап: Уменьшение размеров референц-эллипсоида до определённого масштаба с целью его дальнейшего развёртывания на плоскости, то есть создание условной эллипсоидальной модели Земли (глобуса) в масштабе, пригодном для изготовления карт. Это математическое преобразование эллипсоид – глобус сохраняет геометрическое подобие контуров изображений. Масштаб преобразования называется главным масштабом μo будущей карты. 3-й этап: Выбор картографической проекции для развёртывания условного глобуса на плоскость и проектирование (преобразование глобус – карта). Из теории искажений известно, что при проектировании эллипсоида на плоскость масштаб μo остаётся постоянным лишь на определённом множестве точек карты. В общем случае при удалении от этого множества масштаб изменяется и становится частным масштабом μ другого множества точек. Величина Отношение частного масштаба к главному называется в картографии модулем параллели: Меркаторской милей называется длина изображения одной минуты дуги меридиана Δф в проекции Меркатора, выраженная в линейных единицах в масштабе карты: Линейный морской масштаб lф показывает, сколько морских миль содержится в одном сантиметре карты и представляет величину, обратную меркаторской миле: 11. Выполнение реверса на судах с различными пропульсивними комплексами. Силы взаимодействия винта, руля и корпуса судна, и учёт их при маневрировании. 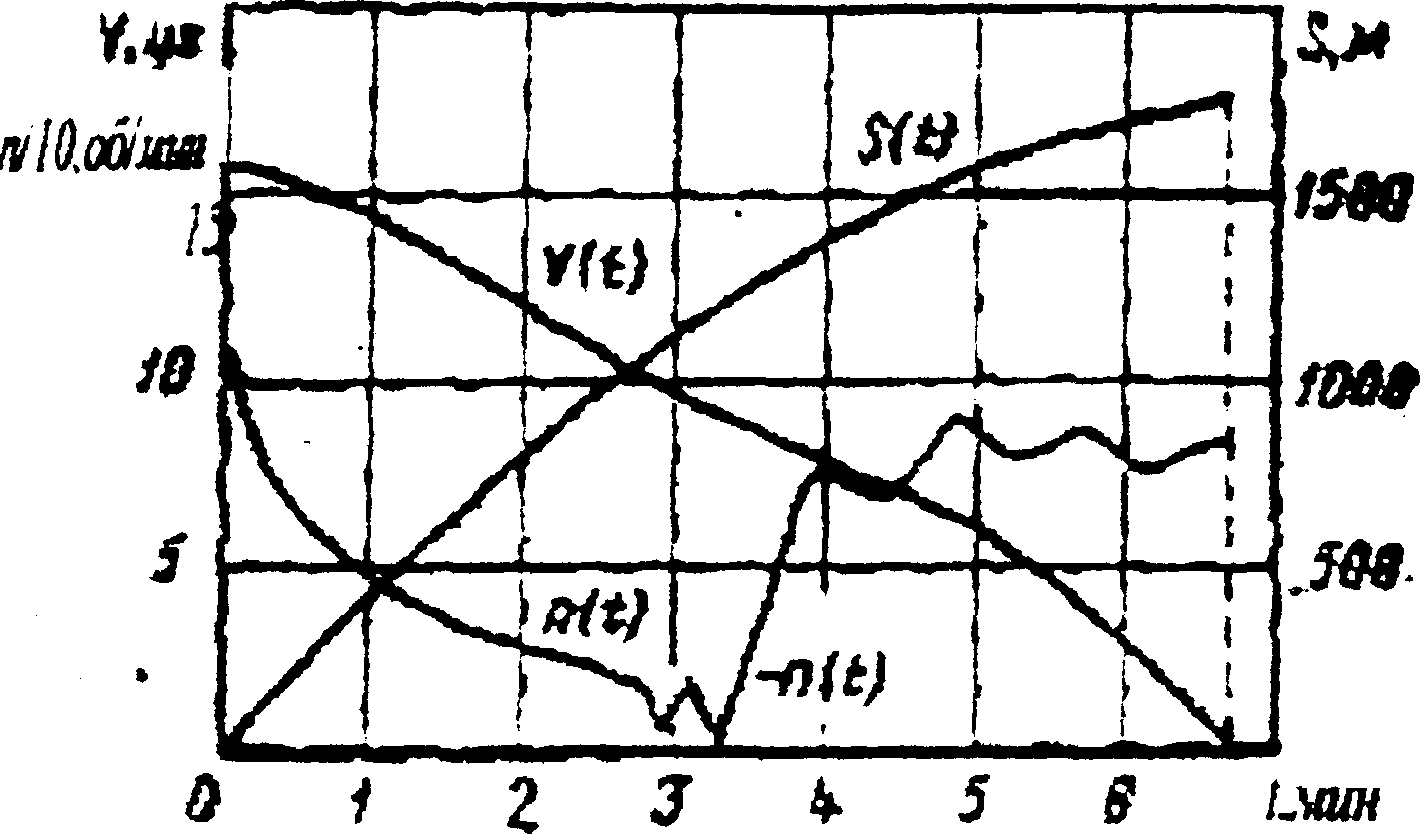 Наибольшее распространение на морских судах в качестве главных двигателей имеют: двигатели внутреннего сгорания (ДВС), турбозубчатые агрегаты (ТЗА) и гребные электродвигатели (ГЭД). В качестве движителей используются ВФШ и ВРШ, образующие пропульсивные комплексы: ДВС-ВФШ, ТЗА-ВФШ, ГЭД-ВФШ, а также любой двигатель — ВРШ. Рассмотрим некоторые характерные особенности выполнения реверсов перечисленных пропульсивных комплексов. Рис. 3.1. Графики торможения теплохода «Серов» с полного переднего хода полным назад Рассмотрим некоторые характерные особенности выполнения реверсов перечисленных пропульсивных комплексов. |