1. Фигура и размеры Земли. Геоид, эллипсоид вращения, референцэллипсоид
 Скачать 3.3 Mb. Скачать 3.3 Mb.
|

99%.Реверсирование ДВС-ВФШ (двигатель внутреннего сгорания с винтом фиксированного шага). На большинстве теплоходов установлены ДВС, напрямую связанные с гребным валом. Чтобы выполнить реверс, сначала закрывается подача топлива на ДВС. Затем, когда обороты снизятся, из пусковых баллонов в цилиндры подается воздух, проворачивающий двигатель в обратном направлении, после этого впрыскивается топливо, которое в результате сжатия воспламеняется, т. е. происходит запуск двигателя на топливе. Для большинства теплоходов характерен замедленный реверс при торможении с полного переднего хода. Это объясняется тем, что давление контрвоздуха, подаваемого при реверсе в цилиндры, оказывается недостаточным для преодоления момента, приложенного к винту со стороны набегающего потока воды. Для большинства ДВС уверенный реверс возможен лишь тогда, когда обороты переднего хода вращающегося в турбинном режиме винта (после прекращения подачи топлива) снизятся до значения 25—35 % от оборотов полного переднего хода, что соответствует снижению скорости судна примерно до значения 60—70 % от скорости полного переднего хода. При этом судно длительное время движется по инерции и успевает пройти значительный путь, нередко намного превышающий путь, проходимый судном после запуска двигателя на задний ход. На рис. 3.1 приведены графики скорости V(1) и тормозного пути, построенные по результатам натурных испытаний теплохода «Серов» водоизмещением 19500 т при торможении с полного переднего хода (Vо—16,4 уз) полным задним ходом (ПХП—ПХЗ). Если же торможение выполняется при сниженной начальной скорости, например с малого переднего хода, то реверс выполняется быстро за 10—15 с и путь торможения резко сокращается. Двигатели внутреннего сгорания на заднем ходу развивают практически такую же мощность, как и на переднем. Реверсирование ТЗА-ВФШ (турбозубчатого агрегата). На турбоходах при торможении используется турбина заднего хода, мощность которой составляет примерно 50% мощности турбины переднего хода (обе турбины имеют общий вал). Для выполнения реверса с помощью маневрового клапана перекрывается пар на сопла турбины переднего хода и открывается на сопла заднего хода. Необходимо учитывать, что ротор турбины вращается с частотой порядка нескольких тысяч оборотов в I мин, поэтому его остановка с помощью контрпара, подаваемого на лопатки турбины заднего хода, не может быть выполнена мгновенно. Тем не менее реверс турбины с полного переднего хода выполняется значительно быстрее, чем на теплоходах, обычно не более чем за 1 мин, но упор винта на заднем ходу сравнительно невелик. Благодаря указанным свойствам тормозные пути турбоходов при торможении с полного переднего хода обычно бывают того же порядка, что и на теплоходах при прочих равных условиях. Однако при малых начальных скоростях тормозные характеристики турбоходов из-за малой мощности турбины заднего хода значительно хуже, чем у теплоходов. Реверсирование ГЭД-ВФШ (гребных электродвигателей). Существуют различные типы электроприводов на постоянном и переменном токе. Судовые энергетические установки электроходов обычно состоят из нескольких дизель- или турбогенераторов, питающих гребные электродвигатели, что позволяет оперативно варьировать мощностями в зависимости от конкретных условий работы судна. Особенно удобны электроприводы на многовинтовых ледоколах и других судах специального назначения, условия работы которых изменяются в широких пределах. Реверсирование электродвигателей осуществляется коммутированием питающего напряжения. Тормозные характеристики электроходов обычно несколько лучше, чем теплоходов. Реверсирование ВРШ (винт регулируемого шага). Изменение направления упора ВРШ происходит в результате поворота лопастей винта без изменения направления вращения двигателя и без снижения частоты вращения. Эффективность ВРШ при торможении существенно зависит от скорости срабатывания привода поворота лопастей. Механизмы поворота лопастей современных ВРШ, управляемые с мостика, позволяют изменить шаг винта с полного переднего на полный задний ход за 5—10 с, что обеспечивает резкое уменьшение тормозного пути. Суда с такими приводами обладают наилучшими реверсивными характеристиками. Винт в направляющей насадке по сравнению с аналогичным винтом бед насадки при одинаковой частоте вращения создает силу упора при торможении приблизительно на 15% меньше. Силы и моменты, возникающие при маневрировании одновинтового судна: При маневрировании судна возникают следующие силы:
Сила взаимодействия руля и корпуса судна С1. Возникает при работе винта на задний ход. За счёт того, что на правой стороне у винта правого вращения возникает область повышенного давления, а на левой – пониженного. В результате этого сила взаимодействия винта и корпуса судна стремится сместить корму влево. 12. Источники помех в работе РЛС, обнаружение неправильных показаний, ложных сигналов, засветки от моря и т. д. Способы подавления помех. Теневые секторы. Характеристики радиолокационной станции. Режим истинного движения. В этом режиме все неподвижные объекты (буи, береговая черта) остаются неподвижными. По следам послесвечения можно судить об истинных курсах и скоростях судов. Однако направление следа послесвечения зависит от погрешности ввода данных пути своего судна и погрешности решающего устройства радиолокационной станции (РЛС). Эти погрешности можно рассматривать по двум составляющим—по скорости и направлению. Погрешность скорости состоит из погрешностей лага, скорости течения и решающего устройства. При ручном вводе скорости вместо погрешности лага имеет место ошибка имитатора лага. Погрешность направления состоит из погрешности гирокомпаса, решающего устройства, индикатора, ветрового сноса и др. Наибольшую опасность представляет погрешность в оценке курса встречного судна. Для уменьшения погрешностей истинного движения, особенно при наличии ветрового дрейфа или сноса на течении, необходимо систематически корректировать вводимые курс и скорость своего судна. Во всех РЛС с истинным движением для этого предусмотрены специальные корректоры (ручки) на передней панели индикатора. Необходимость коррекции определяется по следам послесвечения, оставляемым неподвижными объектами (берегом, буями). Если неподвижный объект перемещается по направлению к судну, следует увеличить вводимую скорость и наоборот. Смещение неподвижных объектов, направленное перпендикулярно курсу своего судна, исключается введением коррекции курса. Режим истинного движения рекомендуется применять при плавании в проливах, шхерах, по фарватерам, при входе в порт и выходе из него. Погрешности радиолокационных измерений. Основными составляющими погрешности измерения направления являются: погрешность визирования (зависит от размера отметки, положения ее относительно центра экрана и конструкции визира), носящая случайный характер; погрешность системы передачи угла с антенны на индикатор (зависит от типа системы), носящая систематический характер; погрешность центровки начала развертки на индикаторе (только для механического визира), имеющая систематический характер; погрешность передачи курса от гирокомпаса, имеющая систематический характер. Погрешность измерения, указанная в паспорте РЛС, соответствует условиям наблюдения объекта на краю экрана (более 2/3 радиуса) при отсутствии качки судна. Учитывая уменьшение точности вблизи центра экрана, рекомендуется выполнять пеленгование при положении отметки объекта на расстоянии больше половины радиуса экрана. При больших значениях качки (бортовой до 12°, килевой до 6°) ошибка пеленгования может увеличиться на 0,5°. Следует также иметь в виду, что погрешность определения разности пеленгов, если она не превышает 10-20°. всегда меньше абсолютной погрешности единичного измерения, так как в нее практически не входят систематические составляющие погрешности измерений. Основными составляющими погрешности измерения расстояния (при использовании подвижного круга дальности) являются: погрешность совмещения ПКД с отметкой цели (зависит от шкалы дальности, четкости изображения и др.) носит случайный характер; погрешность, вызванная неточностью синхронизации передатчика и индикатора, носит систематический характер; температурная погрешность (зависит от схемы ПКД и мер по температурной стабилизации) носит систематический характер; погрешность, вызванная нестабильностью питающих напряжений и соответствующими изменениями режима работы схемы формирования ПКД, носит систематический характер. Погрешности измерения расстояний выражаются относительно максимального значения дальности применяемой шкалы. Это вызвано тем, что размер отметки, определяющий наибольшую часть общей погрешности, одинаков в любой точке установленной шкалы. Влияние метеорологических условий на радиолокационное наблюдение. Помехи. Атмосферные влияния, увеличивающие дальность обнаружения. Значительное искривление луча радиоволн (суперрефракция) наблюдается тогда, когда скорость снижения температуры с высотой меньше, чем при стандартных условиях, или когда скорость уменьшения содержания водяных паров в атмосфере с высотой больше стандартной. Оба эти условия увеличивают дальность действия РЛС, причем при их совместном проявлении радиолокационный луч может оказаться в приземном слое, называемом атмосферным волноводом. Атмосферные явления, уменьшающие дальность обнаружения. Дальность радиолокационного наблюдения может быть снижена при появлении пониженной рефракции (субрефракции) при наличии осадков, тумана и песчаных бурь). Субрефракция создается при быстром падении температуры с увеличением высоты, особенно ночью, или при условии, когда температура теплого прилегающего слоя воздуха охлаждается холодным морем почти до точки росы. В первом случае имеет место хорошая видимость, во втором случае появляется туман. Явление субрефракции часто встречается в арктических районах, однако резкого снижения дальности при этом не наблюдается. Наиболее существенное снижение дальности обнаружения вызывается плотным туманом или дождем. Град влияет так же, как дождь соответствующей интенсивности, влияние снега сказывается меньше. Помехи от волнения. Они имеют характерный вид. Радиус засветки зависит от состояния мири и может достигать 6- 7 миль Засветка от морских волн опасна тем, что на ее фоне могут быть замаскированы даже сильные сигналы от объектов (суда, буи и т. п.). В этих случаях для уменьшения интенсивности засветки применяется временная автоматическая регулировка усиления (ВАРУ). При наличии засветки от морских волн, делающей возможным в ближней зоне, ручку «ВАРУ» («Помехи от моря») следует устанавливать в такое положение, при котором область сплошной засветки превратится в отдельные флуктуирующие точки, на фоне которых можно выделить эхо-сигналы от объектов. Необходимо помнить, что чрезмерное уменьшение усиления в ближней зоне может привести к потере эхо-сигналов от малых судов и других надводных объектов. Поэтому надо следить, чтобы всегда наблюдались отдельные выбросы помех от моря. Интенсивность помех от морского волнения тем меньше, чем короче длительность излучаемых импульсов. Во всех судовых РЛС на крупномасштабных шкалах .0,5- -4 мили) применяются короткие импульсы 0,07 0,1 мкс. на других шкалах—длинные. Поэтому, если, например, ведется наблюдение на шкале 8 миль РЛС «Океан», то в случае большого волнения целесообразно включить шкалу 4 мили, сместив начало развертки на край экрана и сторону, противоположную курсу судна. В РЛС «Океан» и «Енисей-Р» для более эффективной борьбы с помехами от морских волн целесообразно использовать десятисантиметровый диапазон, так как интенсивность помех в этом диапазоне значительно меньше, чем в трехсантиметровом. Кроме того, в РЛС «Енисей-Р» предусмотрен режим совместной обработки сигналов разных диапазонов волн, когда работают оба передатчика, а сигналы с выходов обоих приемников после совместной обработки поступают на один индикатор. Это позволяет получить существенное снижение уровня помех от волнения при сохранении высокой разрешающей способности по углу, присущей трехсантиметровому диапазону. Помехи от осадков и низкой облачности. Ширина диаграммы направленности антенны в вертикальной плоскости составляет 15-20° Поэтому выпадающие осадки (сильный дождь, град, снегопад), а также низкие насыщенные влагой облака будут обнаруживаться так же. как и обычные объекты, и воспроизводиться на экране в виде засвеченных областей, маскирующих эхо-сигналы от судов. При наличии помех от осадков рекомендуется включать дифференциатор (тумблер «МПВ» или «Дождь»), одновременно увеличивая усиление. При этом становится возможным выделить сильные эхо-сигналы от объектов на фоне засветки от выпадающих осадков, а также получить более детализированное изображение при проходе узкостей и при наличии сплошной яркой засветки берегов. В двухдиапазонных станциях весьма эффективной мерой подавления помех от осадков является переход на длину волны 10 см или работа в двух диапазонах одновременно с совместной обработкой сигналов. Интенсивность помех от осадков существенно снижается при работе короткими излучаемыми импульсами Поэтому при необходимости наблюдения за обстановкой впереди по курсу в пределах 5 миль целесообразно эпизодически на короткое время включать крупномасштабную шкалу дальности. Помехи, вызванные боковыми лепестками диаграммы направленности антенны. Некоторая часть энергии излучается антенной в виде боковых лепестков диаграммы направленности, расположенных по обе стороны от главного луча на различных углах. В результате близко расположенные сильно отражающие объекты начинают обнаруживаться, кроме главного лепестка, ещё и боковыми лепестками, что приводит к появлению на экране серии ложных отметок, сильно растянутых по углу и расположенных симметрично относительно истинной отметки. Обычно ложные сигналы такого рода наблюдаются на дальностях не более 3—4 миль и могут быть ослаблены с помощью ВАРУ. Однако при регулировке ВАРУ следует помнить, что одновременно ослабляются и полезные сигналы, особенно сигналы малых судов и плавучих навигационных знаков. Ложные и многократные отражения. Сигналы от близко расположенного объекта могут быть получены двумя путями: путем прямого облучения и путем облучения за счет отражения от судовых надстроек (мачты, трубы и т. п.). Это обстоятельство приводит к появлению на экране двух сигналов - одного на истинном направлении и правильном расстоянии и ложного на таком же расстоянии, но в теневой зоне. Если теневые зоны известны, то не составляет труда отличить действительные сигналы от ложных. При наблюдении объектов на небольших расстояниях возможно также появление ложных сигналов за счет многократного отражения (например, если вблизи проходит крупное судно, то излученные импульсы могут многократно отражаться от обоих судов), располагающихся в виде серии отметок на равных интервалах по одному направлению. В этом случае действительным является только первый сигнал, все остальные обычно скоро исчезают при увеличении дистанции или изменении взаимного ракурса судов. Помехи от работающих РЛС. Они имеют место тогда, когда поблизости находятся другие суда с работающими радиолокаторами того же частотного диапазона, что и радиолокатор судна-наблюдателя. Помехи этого рода могут также наблюдаться от береговых РЛС и от своих вторых РЛС. По внешнему виду они представляют собой серии точек или линии, располагающиеся радиально по всему экрану либо в виде спирали. Они легко отличаются от других эхо-сигналов по внешнему виду. При каждом обороте антенны они меняют свое положение. Теневые зоны. Теневыми зонами называются секторы обзора РЛС, в которых вследствие влияния судовых препятствий (мачт, труб и др.) дальность действия станции уменьшается либо объект совершенно не обнаруживается. Величина теневой зоны зависит от ширины препятствия и его расстояния до антенны РЛС, При эксплуатации РЛС теневые зоны можно наблюдать на экране в виде темных секторов на фоне помех от морского волнения. Таким путем можно наиболее просто определить их и учитывать при использовании РЛС. Следует иметь в виду, что в зонах обзора, находящихся на границе теневых секторов, диаграмма направленности антенны искажается, боковые лепестки усиливаются, что вызывает ухудшение разрешающей способности РЛС и точности измерений углов. 13. Классификация карт, используемых в судовождении. Содержание карт. Руководства и пособия для плавания. Требования конвенции СОЛАС в отношении карт и пособий для плавания. Картой называется обобщённое и уменьшённое изображение поверхности Земли с применением определённой картографической проекции. Планом называется плоское изображение небольшого участка земной поверхности, в пределах которой кривизной земной поверхности пренебрегают. Морские карты и другие навигационные пособия на все районы океанов и морей издаются Главным управлением навигации и океанографии (ГУНиО), а в зарубежных странах – гидрографическими службами (департаментами). Морские карты издаются главным образом в меркаторской проекции и по своему назначению подразделяются на три вида:
Общенавигационные карты являются основной подгруппой морских карт, обеспечивающих безопасность мореплавания. На них наиболее полно отражается рельеф дна, характер берегов и вся навигационная обстановка (огни, знаки, буи, фарватеры и др.). В зависимости от масштаба общенавигационные морские карты подразделяются на: генеральные, имеющие масштаб от 1:1000000 до 1:5000000; путевые – от 1:100000; частные – от 1:25000 до 1:100000; планы – от 1:100 (при производстве различных гидрографических работ) до 1:25000. Частные карты содержат все навигационные подробности. Дополнительно к картам издаются различные пособия и справочники, из которых можно почерпнуть много полезных, необходимых сведений. К таким пособиям можно отнести руководства для плавания (лоции), в которых собраны все необходимые для мореплавателя сведения, включая рекомендованные пути и советы по ориентировке при плавании вблизи берегов. Для подбора карт и пособий издаётся специальный «Каталог карт и книг». Все карты и пособия имеют свой номер, который называется адмиралтейским. Номера карт состоят из пяти цифр, которые означают: первая – океан или его часть (1 – Северный Ледовитый Океан, 2 и 3 – Северная и Южная часть Атлантики, 4 – Индийский Океан, 5 и 6 – Южная и Северная часть Тихого Океана), вторая – масштаб карты (каждой группе масштаб соответствует цифре от 0 до 4), третья – район моря, в пределах которой находится карта, четвёртая и пятая – порядковый номер в данном районе. Навигационные морские карты и карты-сетки имеют номера, первой цифрой которой является 9. Вторая цифра обозначает океан или его часть; третья цифра – масштаб; последние две являются порядковыми номерами карты в океане.  Содержание Британских карт:
Руководства и пособия для плавания: 1. Правила плавания.
5. Карты, лоции для районов интенсивного судоходства. 14. Пассивное торможение. Основные зависимости. Пассивное торможение выполняется при остановленном двигателе только за счёт сопротивления воды. В общем случае процесс пассивного торможения можно разделить на 2 периода:
Общий вид движения судна при торможении описывается диф. уравнением: Оно основано на парадоксе Даламбера, когда сумма всех сил равна 0, где: m - масса судна с учётом присоединённой массы воды по оси X; m*dV/dt - ускорение ("+" - при разгоне, " - " - при торможении) m dV/dt - сила инерции; К - коэффициент сопротивления воды; V - скорость в продольном направлении; К V2- сила сопротивления воды; Ре - сила упора винта. При пассивном торможении сила упора Ре=0, тогда диф. управление принимает вид: Р 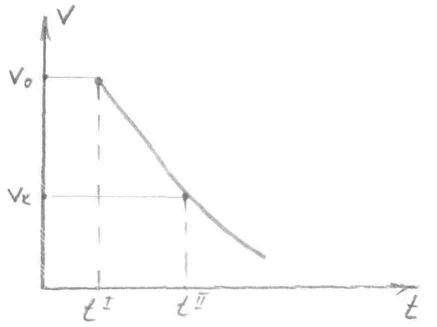 ешение диф. уравнения производится путем разделения переменных и интегрирования в пределах от Vo до Vk. ешение диф. уравнения производится путем разделения переменных и интегрирования в пределах от Vo до Vk.Для того, чтобы определить пройденное расстояние необходимо: Пассивное торможение выполняется при остановленном двигателе только за счет сопротивления воды. 15. Основные типы САРП, их характеристики. Эксплуатационные требования к САРП. Опасность передоверия САРП. Современные САРП по конструкции разделяются на 2 основных типа: системы с автономным индикатором, подключаемым к штатной судовой РЛС; системы, являющиеся составной частью штатной судовой РЛС, с общим индикатором кругового обзора. Общим для всех САРП является использование цифровой вычислительной техники для обработки поступающих радиолокационных данных и отображение результата обработки на индикаторе кругового обзора в форме векторов, символов, охранных зон, отметок прошлого движения целей и других обозначений. Эксплуатационные требования. Требования по точности определены для следующих параметров: относительный курс, относительная скорость цели, расстояние до точки кратчайшего сближения, время выхода в точку кратчайшего сближения, истинные курс и скорость цели. Требования отнесены к четырем типовым сценариям, охватывающим различные ситуации встречи. При скоростях судна 10-25 уз, относительной скорости цели в пределах 10-20 уз, дистанции до цели от 1 до 8 миль вектор относительной скорости должен определяться с погрешностью по направлению, не превышающей 5 0 на величине 1 узел. Расстояние до точки кратчайшего сближения должно вычисляться с погрешность не более 0,7 милей, а время выхода в эту точку – с погрешностью до 1 минуты. САРП, как любая система, является только средством судовождения и как всякое средство имеет свои ограничения ( включая ограничения датчиков информации ). Поэтому чрезмерное доверие к САРП без надлежащих знаний, заложенных в систему принципов и правил эксплуатации может создать аварийную ситуацию. 16. Способы определения дрейфа судна. Учёт дрейфа и течения при счислении, точность счисления. Дрейфом судна называется отклонение движущегося судна с линии намеченного курса под воздействием ветра и ветрового волнения. Направление ветра определяется по той точке горизонта, откуда дует ветер (ветер дует в компас) и выражается в румбах или градусах. Дрейф возникает под воздействием силы давления набегающего потока воздуха на надводную часть судна. Скорость и направление этого потока соответствует вектору скорости кажущегося (наблюдаемого) ветра. где ν - вектор скорости истинного ветра; V – вектор скорости судна; W – вектор скорости кажущегося ветра. Несимметрические отклонения от курса под действием порывов ветра, ударов волн, отклонения руля вызывают зарыскивание судна, которое может быть как под ветер, так и на ветер. Говоря об определении и учёте дрейфа, под термином «дрейф» будем понимать результирующее отклонение судна с линии истинного курса. Угол α между линией истинного курса и линией пути судна называется углом дрейфа. Угол между северной частью истинного мередиана и линией пути при дрейфе называется путевым углом α. Угол α имеет знак «+» - если ветер дует в левый борт, и «-» - если в правый. Для учёта дрейфа при прокладке необходимо знать угол дрейфа, Угол дрейфа можно определить из наблюдений или вычислить по формулам, специально составленным таблицам или номограммам.
Формула Дёмина С.И. tg α - отрицательный, то α =0. W – сила (скорость) ветра, м/с. V – скорость судна, м/с. q – курсовой угол к ветру. Т – осадка судна, м. L – длина судна судна, м. В – ширина судна, м. – коэффициент полноты ватерлинии. Sн – боковая площадь надводной части. Sп – боковая площадь подводной части. с = ПУ – ИК; β - угол сноса от течения, с – снос. Погрешность счисления слагается из погрешностей в принятом направлении движения судна (курса, угла дрейфа, угла сноса, поправки гирокомпаса и др.) и погрешностей в пройденном расстоянии (поправка лага или скорости, принятой для счисления погрешности в учёте течения или неучёта последнего). Погрешности первой группы вызывают боковое смещение судна:  . .Значения а и b могут быть приняты за полуоси эллипса погрешности счисления. Они позволяют вычислить СКП счисления: На больших переходах формулы для расчёта а и b дают завышенные результаты, так как погрешности счисления на одном отрезке пути частично компенсируются таковыми на другом отрезке. В этом случае для расчёта а и b рекомендуется использовать формулы: Производя статическую обработку погрешностей счисления, можно получить коэффициент точности счисления Следует помнить что погрешность счисления не тождественна погрешности счислимого места, так как в последнюю входит и погрешность исходной точки.  17. Активное торможение. Основные зависимости. Активное торможение обеспечивается за счёт реверсирования главного двигателя, после чего создаётся сила упора винта назад. В общем случае процесс активного торможения можно разделить на 3 этапа:
При активном торможении диф. уравнение принимает вид: В процессе активного торможения сила Ре изменяется по закону: где Vo - скорость в момент начала торможения.  1) Если Vo>Vpeв, то Vн=Vрев. Vрев - это скорость переднего хода при которой двигатель внутреннего сгорания уверенно запускается на задний ход. Поскольку Vо>Vрев процесс торможения состоит из 3-х периодов: 1 Прохождение команды t1; (=10с) 2 Пассивное торможение t2 при котором происходит падение скорости от Vо доVн. 3 Активное торможение, t3 при котором происходит падение скорости за счет упора винта, работающего на задний ход от Vн до 0 2) Если Vo < Vрев, то процесс активного торможения состоит из 3-х периодов: 1 Прохождение команды t1; (=10c) 2 Время запуска главного двигателя на ЗХ, по правилам тех. эксплуатации он составляет 15с. 3 Период активного торможения t3 Введем обозначения: а - коэффициент активного торможения С учетом этого: Решение этого диф. уравнения зависят только от величины а. Активное торможение обеспечивается за счет реверсирования главного двигателя, после чего создается сила упора винта назад. 18. Анализ информации, получаемой от САРП. Истинные и относительные векторы. Имитация манёвра для безопасного расхождения, параметры манёвра, время начала исполнения манёвра, контроль выполнения манёвра. Выбор режима индикации векторов перемещений судов в истинном или относительном движении определяется условиями плавания. Индикацию векторов истинного перемещения рекомендуется применять при плавании в проливах, фарватерах во входе в порт и выходе из него, когда он позволяет визуально оценить истинные курсы и скорости встречных судов, быстро отличить подвижные объекты от неподвижных и исключает смазывание радиолокационного изображения береговой черты. Режим относительного движения обычно используется для более точной оценки ситуации сближения и позволяет значительно проще определять степень опасности нескольких судов по расположению ЛОД относительно допустимой зоны кратчайшего сближения. Поэтому его рекомендуется использовать в районах интенсивного судоходства в условиях ограниченной видимости для оценки ситуации и выбора маневра. Коротко можно сказать так – ИД применяется чаще всего в САРП имитируется строения расхождения, включающий только один маневр : курсом, скоростью, или курсом и скоростью. Некоторые САРП могут имитировать два последовательных маневра. Имитация может производиться в относительном или истинном движении. Она может быть статической или динамической. При статической – на экране прокладчика сразу отображается ситуация соответствующая моменту окончания выбора маневра. При этом учитывается: время задержки маневра, который выбрал судоводитель и метод непосредственного маневрирования. При динамической имитации – процесс маневра отображается в ускоренном масштабе времени ( приблизительно в 30 раз). 19. Навигационная изолиния, линия положения, полоса положения. СКП определения места судна по двум линиям положения. Навигационным параметром U называется величина, зависящая известным образом от положения точки и измеряемая для определённого места судна, например пеленг, расстояние, высота светила и т. п. Геометрическое место точек, отвечающее постоянному значению навигационного параметра, называется навигационной изолинией. В навигации для определения места судна используются следующие навигационные параметры и соответствующие им изолинии: Пеленг. На судне измерен истинный пеленг (ИП) предмета А, равный α. Проложив на карте линию пеленга АД, можно увтерждать, что судно в момент взятия пеленга находилось на этой линии. Прямая линия АД, отвечающая условию задачи, на которой находилось судно в момент наблюдения, будет называться изолинией пеленга или изопеленгой. Расстояние. Измерено расстояние Д между судном и ориентиром А. В этом случае судно будет находится на окружности радиусом Д с центром в точке А. Эта окружность будет называться изолинией расстояния или изостадией. Горизонтальный угол. Если измерен горизонтальный угол между предметами А и Б, равный α, или этот угол вычислен как разность двух пеленгов Разность расстояний. В некоторых радионавигационных системах измеряется разность расстояний до двух ориентиров. Тогда изолинией разности расстояний будет гипербола. Линией положения называется прямая, заменяющая участок навигационной изолинии вблизи счислимого места. Если линию положения (или участок изолинии) сместить в обе стороны на значение её СКП mp, то получим среднюю квадратическую полосу положения, внутри которой с вероятностью |
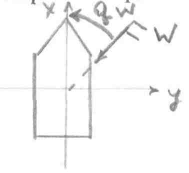 удоводитель всегда измеряет кажущийся ветер на движущемся судне. Он характеризуется величиной курсового угла qw и скоростью W. Величина аэродинамической силы действующей на судно рассчитывается:
удоводитель всегда измеряет кажущийся ветер на движущемся судне. Он характеризуется величиной курсового угла qw и скоростью W. Величина аэродинамической силы действующей на судно рассчитывается: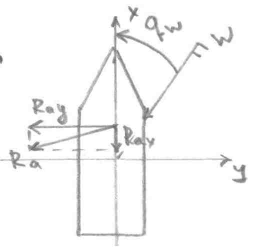 ,
,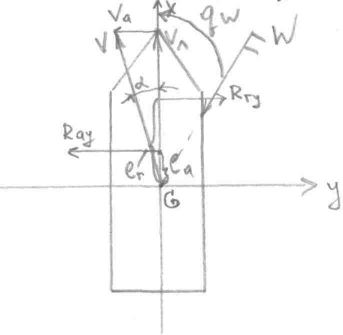 родольная составляющая Rax вызывает изменение cопротивления, а сила Ray - боковое смещение. Под действием Ray на корпусе судна возникает ветровой дрейф с углом α
родольная составляющая Rax вызывает изменение cопротивления, а сила Ray - боковое смещение. Под действием Ray на корпусе судна возникает ветровой дрейф с углом α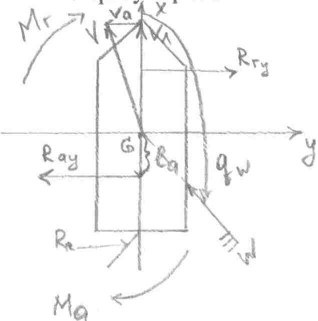 ри появлении угла ветрового дрейфа по надводной части корпуса судна возникает поперечная гидродинамическая сила Rry - которая направлена в сторону противоположную Ray, но смещается в сторону носа от миделя. В этом случае знаки Ма и Мг совпадают. Для удержания судна на курсе необходимо переложить руль, момент которого должен скомпенсировать сумму Мр>Ма + Mr, по этой причине судно на кормовых курсовых углах ветра управляется плохо.
ри появлении угла ветрового дрейфа по надводной части корпуса судна возникает поперечная гидродинамическая сила Rry - которая направлена в сторону противоположную Ray, но смещается в сторону носа от миделя. В этом случае знаки Ма и Мг совпадают. Для удержания судна на курсе необходимо переложить руль, момент которого должен скомпенсировать сумму Мр>Ма + Mr, по этой причине судно на кормовых курсовых углах ветра управляется плохо.