|
1. Фигура и размеры Земли. Геоид, эллипсоид вращения, референцэллипсоид

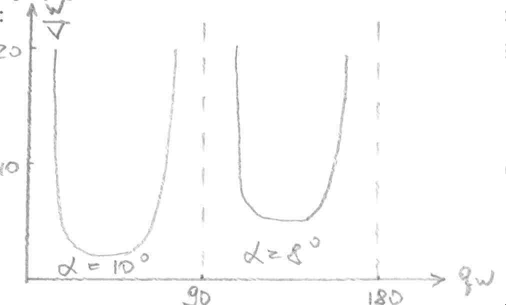
Руль как средство управления, эффективен до углов перекладки руля 35
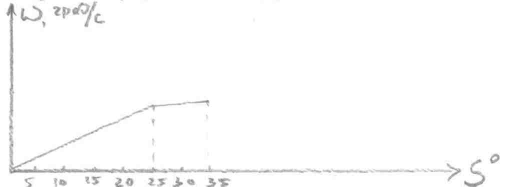
Условие потери управляемости можно записать двумя способами либо другим способом записи является равенство: . .
Момент на руле больше либо равняется сумме аэро и гидродинамической сил. Если перед потерей управляемости судно приводится к ветру, то говорят, что наступает потеря управляемости первого рода. Если же при потере управляемости судно уваливается под ветер, то говорят, что наступает потеря управляемости второго рода.

Для оценки потери управляемости для каждого судна можно построить диаграмму потери управляемости:
24. Аварийные радиобуи EPIRB, SART. Назначение, использование, эксплуатационные проверки.
Аварийный радиобуй (АРБ) системы КОСПАС-САРСАТ RT-260 (Graseby Nova)
АРБ использует спутниковую систему, называемую COSPAS-SARSAT, которая была создана исключительно для обнаружения радиомаяков бедствия, передающих на частотах 121,5 МГц или 406 МГц. Спутники на околополярных орбитах обнаруживают передаваемый сигнал и кодированное сообщение, передаваемое радиомаяком, затем они ретранслируют информацию на расположенные на берегу земные приемные станции, которые преобразуют данные в координаты местоположения маяка, используя принцип доплеровского сдвига. Если спутник находится вне диапазона действия земной приемной станции, он сохраняет данные, полученные на частоте 406 МГц, до момента входа в зону действия и затем передает вызов бедствия. Время задержки до передачи на земную приемную станцию зависит от местоположения и времени до следующего прохождения спутника (обычно больше на экваторе и меньше на полюсах). На экваторе это время может достигать 90 минут. Точность местоположения по сигналу на частоте 406 МГц составляет 5 км.
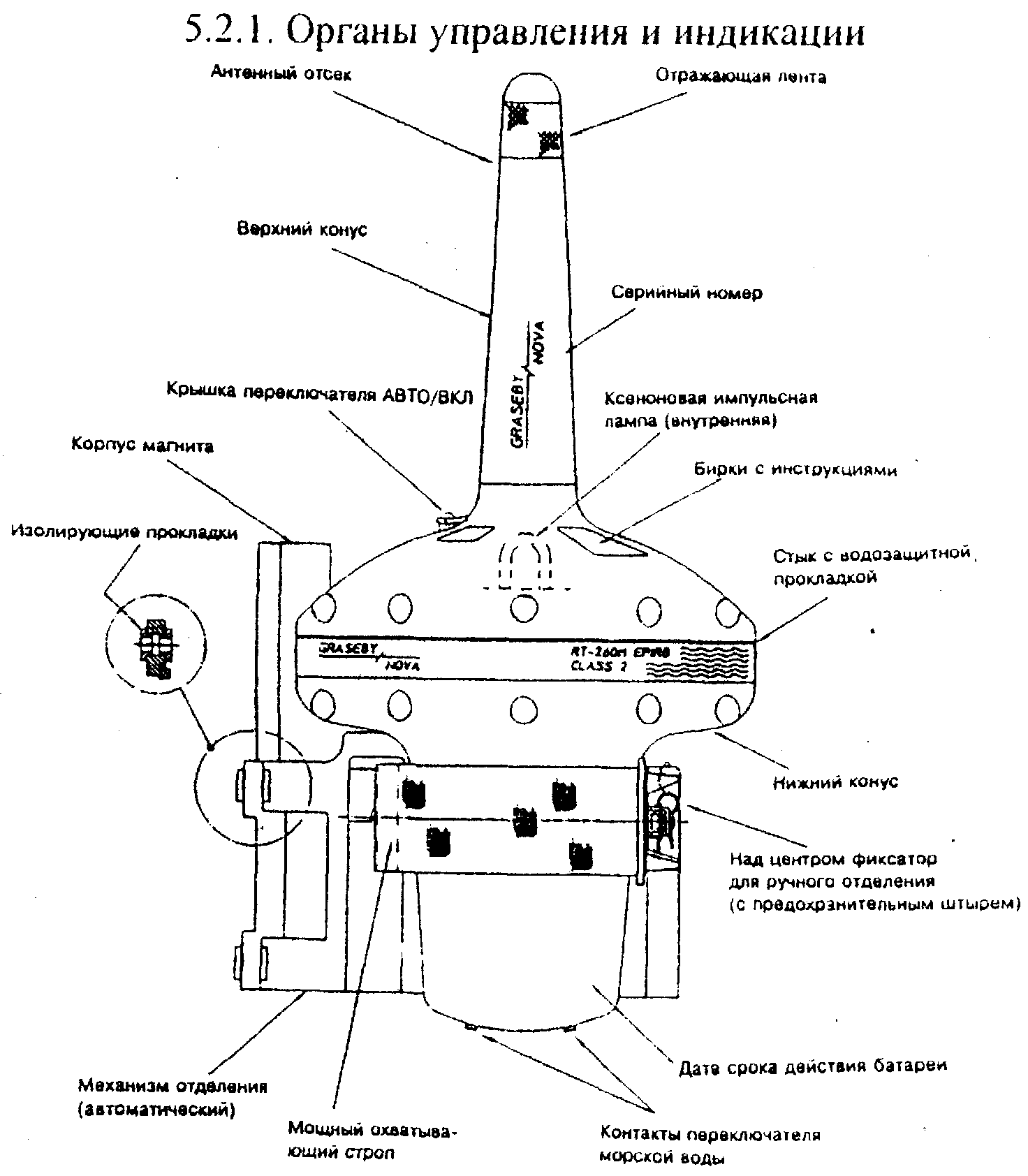
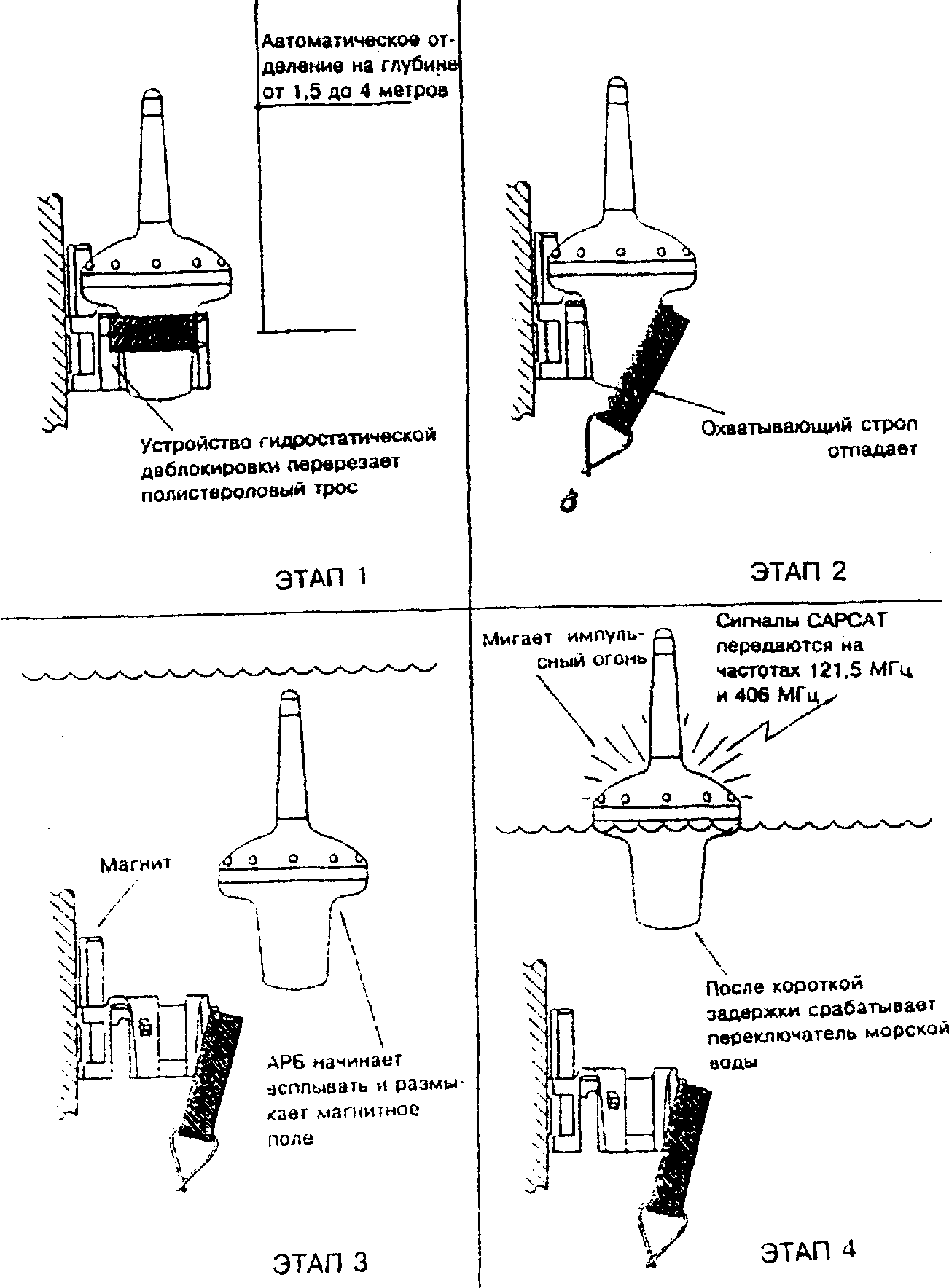
Рис. 5.3. Аварийный радиобуй
Рис. 5.4. Последовательность автоматического отделения АРБ
Передача на частоте 121,5 МГц позволяет службам поиска и спасания осуществить привод на маяк и таким образом точно определить положение аварийного буя.
Работа.
Автоматическая работа.
Когда механизм отделения погружается на глубину от 1,5 до 4 метров, устройство гидростатической деблокировки активирует нагруженный на пружину резчик, который перерезает трос и освобождает EPIRB. Плавучесть EPIRB обеспечивает его всплытие на поверхность вверх маячной лампой и антенной. EPIRB активируется переключателем морской воды и автоматически начинает работать.
ПРИМЕЧАНИЕ: Во время работы EPIRB на передачу мигает импульсная лампа. Для выключения EPIRB можно извлечь его из воды. Примерно через пять секунд он выключится.
Ручная работа.
Для включения EPIRB вручную, необходимо:
а) Удерживая EPIRB в одной руке, вытащить предохранительный штырь из переключающего зажима и потянуть к себе шнур.
б) Освободить переключающий зажим и отжать установочную стяжку.
в) Вынуть EPIRB из механизма отделения.
г) Бросить EPIRB в воду, принимая меры предосторожности; или
д) Снять крышку переключателя АВТО/ВКЛ. е) Переключить в положение ВКЛ.
ПРИМЕЧАНИЕ: Если Вы покидаете судно, возьмите EPIRB с собой в спасательный плот/шлюпку и держите его на плаву на расстоянии от себя, удерживая его на лине.
Проверка.
АРБ должен проверяться один раз в месяц, используя следующие процедуры:
Нажать тестовый переключатель на время около 1 секунды и отпустить. Если АРБ функционирует нормально, то:
а) красная индикаторная лампа даст одну короткую вспышку;
б) спустя 14 секунд импульсная лампа маяка и красная индикаторная лампа начинают постоянно мигать примерно в течение последующих 15 секунд;
в) красная лампа продолжает мигать в течение всего цикла проверки (75 секунд);
г) завершение теста производится автоматически.
ПРИМЕЧАНИЕ: Если EPIRB функционирует не нормально его необходимо срочно вернуть вашему поставщику для расследования.
Случайное включение.
Если по какой-либо причине АРБ включился, когда нет аварийной ситуации выполните приведенную ниже процедуру:
а) свяжитесь с береговым спасательно-координационным центром (rcc) и известите его о ложном сигнале тревоги;
б) выньте АРБ из воды/жидкости, в которой он может находиться. Примерно через пять секунд АРБ выключится;
в) поставьте переключатель АВТО/ВКЛ в положение АВТО;
г) поместите АРБ правильно в механизм отделения;
д) убедитесь, что импульсная лампа прекратила мигание.
Если EPIRB всё ещё находится во включённом состоянии, необходимо открыть его и отсоединить батарею. Эту операцию следует проводить внутри судна, где металлические переборки помогут экранировать сигнал.
Верните буй и механизм отделения вашему поставщику или в адрес, указанный в инструкции. Важно, чтобы EPIRB был возвращён в его механизме отделения, так как это защитит от ложного срабатывания и разрядки батареи во время транспортировки.
Эксплуатационные требования к свободно всплывающим УКВ радиобуям – указателям местоположения (Резолюция ИМО А.805(19)).
АРБ должен быть способен передавать УКВ сигнал тревоги при бедствии и обеспечивать передачу сигнала о местоположении с помощью радиолокационного ответчика, работающего на частоте 9 Ггц. Эти две функции могут быть совмещены в одном блоке. Радиолокационный ответчик (РЛО САР) должен соответствовать рекомендации по эксплуатационным требованиям к радиолокационным ответчикам спасательных шлюпок и плотов для использования в поисково-спасательных операциях и обеспечивать определение местоположения средства, терпящего бедствие, на экранах радиолокаторов средств, оказывающих помощь, с помощью серии точек, расположенных на равном расстоянии друг от друга.
АРБ должен быть автоматического, свободно всплывающего типа. Оборудование, крепление и устройство отделения должны быть надёжными даже в экстремальных условиях.
УКВ АРБ должен:
легко приводится в действие неподготовленным персоналом;
быть оборудован соответствующими средствами защиты от случайного включения;
иметь такую конструкцию, чтобы электрические элементы были водонепроницаемыми на глубине 10 м в течение, по крайней мере, 5 мин. Должны быть учтены изменения температуры до 45оС при переводе АРБ из закреплённого положения в погружённое положение. Вредное воздействие морской среды, конденсация и протечка воды не должны влиять на рабочие характеристики радиобуя;
автоматически включаться после свободного всплытия;
включаться и выключаться вручную;
быть снабжён средствами, указывающими на илучение сигналов;
плавать вертикально на тихой воде и иметь положительную остойчивость и достаточную плавучесть при любом состоянии моря;
сбрасываться в воду без повреждений с высоты 20 м;
подвергаться проверке на судне без излучения аварийного сигнала для определения его нормальной работоспособности;
быть хорошо видимого жёлтого/оранжевого цвета и иметь покрытие из светоотражающего материала;
быть снабжён плавучим фалинем, пригодным для использования в качестве буксира, который должен быть устроен таким образом, чтобы не запутываться в конструкции судна и не препятствовать свободному всплытию АРБ;
быть снабжён лампочкой светосилой 0,75 кд с непродолжительным циклом включения, включающейся в темное время суток для указания его положения находящимся поблизости терпящим бедствие и спасательным средствам;
быть устойчивым к воздействию морской воды или нефти;
быть стойким к разрушениям при длительном воздействии солнечных лучей.
Батарея должна иметь достаточную ёмкость для обеспечения работы УКВ АРБ в течение, по крайней мере, 48 ч.
Установленный АРБ должен:
иметь местное ручное включение; также может быть предусмотрено дистанционное включение с ходового мостика, когда АРБ установлен и закреплён в устройстве автоматического отделения;
быть способен, когда он установлен на судне, нормально работать в условиях ударных нагрузок и вибрации и других условиях окружающей среды, обычно встречающихся на верхней палубе морских судов;
иметь такую конструкцию, которая позволяет ему отделяться и свободно всплывать при погружении на глубину до 4 м при любом угле крена или дифферента.
На наружной стороне оборудования должны быть ясно указаны:
1. краткая инструкция по эксплуатации;
2. дата истечения срока службы используемой первичной батареи.
Под «характером бедствия» должно быть указано «излучение АРБ».
Информация «координаты бедствия» и «время» может не включаться.
В указании «тип последующей связи» должно быть «информация отсутствует», что означает, что последущая связь не будет осуществляться.
Сигналы тревоги при бедствии должны передаваться в пакетах. (N+1)-й пакет передачи, который состоит из пяти следующих друг за другом последовательных сочетаний ЦИВ, должен передаваться с интервалом Tn после (N-го) пакета, где Tn = (230+10М) секунд  5% и N = 1, 2, 3,… 5% и N = 1, 2, 3,…
Эксплуатационные требования к свободно всплывающим спутниковым аварийным радиобуям – указателям местоположения, работающим на частоте 1,6 Ггц (Резолюция ИМО А.812(19), (Резолюция ИМО А.810(19)).
Общие положения.
Спутниковые АРБ должны:
1. быть оборудованиы соответствующими средствами защиты от непреднамеренного включения;
2. иметь такую конструкцию, чтобы электрические элементы были водонепроницаемыми на глубине 10 м в течение, по крайней мере, 5 мин. Должны быть учтены изменения температуры до 45оС при переводе АРБ из закреплённого положения в погружённое положение. Вредное воздействие морской среды, конденсация и протечка воды не должны влиять на рабочие характеристики радиобуя;
3. автоматически включаться после свободного всплытия;
4. включаться и выключаться вручную;
5. быть снабжён средствами, указывающими на илучение сигналов;
6. плавать вертикально на тихой воде и иметь положительную остойчивость и достаточную плавучесть при любом состоянии моря;
7. сбрасываться в воду без повреждений с высоты 20 м;
8. обеспечивать проверку без использования спутниковой системы для определения нормальной работы АРБ;
9. быть хорошо видимого жёлтого/оранжевого цвета и иметь покрытие из светоотражающего материала;
10. быть снабжён плавучим фалинем, пригодным для использования в качестве буксира, который должен быть устроен таким образом, чтобы не запутываться в конструкции судна и не препятствовать свободному всплытию АРБ;
11. быть снабжён лампочкой светосилой 0,75 кд с непродолжительным циклом включения, включающейся в темное время суток для указания его положения находящимся поблизости терпящим бедствие и спасательным средствам;
12. быть устойчивым к воздействию морской воды или нефти;
быть стойким к разрушениям при длительном воздействии солнечных лучей.
Установленный спутниковый АРБ должен:
1. иметь местное ручное включение; также может быть предусмотрено дистанционное включение с ходового мостика, когда АРБ установлен и закреплён в устройстве автоматического отделения;
2. быть способен, когда он установлен на судне, нормально работать в условиях ударных нагрузок и вибрации и других условиях окружающей среды, обычно встречающихся на верхней палубе морских судов;
3. иметь такую конструкцию, которая позволяет ему отделяться и свободно всплывать при погружении на глубину до 4 м при любом угле крена или дифферента.
Если спутниковый АРБ приводится в действие вручную, оповещение о бедствии должно запускаться только специальным выключателем оповещения о бедствии, который должен:
1. быть чётко обозначенным;
2. быть защищённым от непреднамеренного включения.
Запуск оповещения о бедствии должен требовать, по меньшей мере, двух независимых действий.
Спутниковый АРБ не должен автоматически приводитсья в действие, будучи вручную вынутым из устройства отделения.
На наружной стороне оборудования должны быть ясно указаны:
1. краткая инструкция по эксплуатации;
2. дата истечения срока службы используемой первичной батареи.
3. код идентификации, запрограммированный в передатчике.
Спутниковый АРБ должен иметь конструкцию, позволяющую работать при следующих условиях окружающей среды:
температуре от –20оС до 4-55оС;
обледенении;
относительной скорости ветра до 100 узлов;
после хранения при температуре от -30оС до +70оС.
Спутниковый аварийный радиобуй – указатель местоположения, работающий на частоте 406 МГц.
АРБ должен:
обеспечивать передачу оповещения о бедствии на спутник, находящийся на полярной орбите;
иметь частоту 406,025 МГц для передачи сигнала оповещения о бедствии;
иметь частоту 121,5 МГц для привода, главным образом, воздушных судов. Сигнал привода должен иметь непрерывный рабочий цикл, за исключением того, что он может прерываться максимально на 2 секунды в течение передачи сигнала на частоте 406 МГц.
Батарея должна иметь достаточную ёмкость для обеспечения работы УКВ АРБ в течение, по крайней мере, 48 ч.
Частью всех сообщений должен быть идентификатор АРБ. До 1 февраля 1999 года этот идентификатор АРБ должен включать три цифры кода страны, где зарегистрирован АРБ, и следующими за ними либо:
последующими 6 цифрами идентификации судовой станции;
особым серийным номером; или
радиопозывным.
После 1 февраля 1999 года все новые установки АРБ должны соответствовать методу 1.
Спутниковый аварийный радиобуй – указатель местоположения, работающий на частоте 1,6 ГГц.
АРБ должен:
обеспечивать передачу оповещения о бедствии на геостационарный спутник;
непрерывно обеспечиваться данными о местоположении судна для автоматического ввода в сообщение о бедствии при включении;
быть оборудован радиолокационным ответчиком для поиска и спасания, если не предусмотренны встроенные устройства автоматического обновления данных о местоположении после включения.
Батарея должна иметь достаточную ёмкость для обеспечения работы:
передатчика оповещения о бедствии в течение 4 ч или, по крайней мере, 48 ч, если предусмотренны встроенные устройства дл автоматического обновления данных о местоположении;
любых других устройств (например, радиолокационного ответчика для поиска и спасания и проблескового огня), по крайней мере в тесене48 ч.
Любое соединение с АРБ, например, с целью ввода данных или подачи питания, должно быть коррозийно-стойким и защищённым от случайного отсоединения.
Спутниковый АРБ не должен автоматически приводиться в действие, будучи вручную вынутым из устройства отделения.
SART McMurdo RT9.
Радиолокационный ответчик фирмы McMurdo (SART RT9) предназначен для обнаружения терпящих бедствие во время проведения работ по поиску и спасанию. SART работает по принципу приёма импульсов поискового радара и передачи ответной серии импульсов, которые радар отображает как обычные отражённые сигналы.
Судовой радар передаёт поток импульсов большой мощности на фиксированной частоте в диапазоне между 9,2 и 9,5 ГГц (диапазон 3 см).
Тренажёр обеспечивает имитацию следующих функций работы радиолокационного ответчика RT-9 фирмы McMurdo:
а) Тестовая проверка ответчика.
б) Установка ответчика в дежурный режим.
Ввод в действие.
Установка дежурного режима.
Удалить предохрпнительный ярлык. Нажать кнопочный переключатель (кнопку питания) на центральной секции прибора. Примерно 1 раз в 12 сек будет слышен короткий звуковой сигнал, сопровождаемый миганием светового индикатора. Для выключения дежурного режима необходимо вставить ключ (поставаляемый в комплекте с ответчиком) в отверстие диаметром 6 мм с задней стороны центральной секции. Звуковой тон и мигание индикатора прекратятся.
Диагностика.
а) Извлечь SART из установочного кронштейна.
б) Вставить ключ в отверстие диаметром 3 мм, соблюдая осторожность, чтобы не повредить защитный ярлык.
в) Нажать на ключ для приведения в рабочее состояние товетчика. После задержки от 2 до 12 секунд начнёт мигать индикатор. Звучат короткие сигналы, что подобно типичной обстановке, когда прибор работает в режиме ответчика.
г) Проверить работу, используя судовой радар.
д) Выключить SART, используя приведённую ниже инструкцию по дезактивации.
Проверку проводить в течение короткого времени (нескольких секунд).
Дезактивация.
Для дезактивации вставить ключ в отверстие диаметром 6 мм с задней стороны центральной секции. Звуковой тон и мигание индикатора прекратятся, когда дезактивация закончится.
Эксплуатационные требования к радиолокационным ответчикам спасательных шлюпок и плотов (Резолюция IMO А.802(19)).
Радиолокационный ответчик (РЛО), работающий на частоте 9 ГГц, должен обеспечивать указание местоположения единицы, терпящей бедствие, на экране радиолокатора посредством серии точек, расположенных на равном расстоянии друг от друга.
РЛО должен:
легко приводиться в действие неподготовленным персоналом;
быть оборудован средствами защиты от непреднамеренного включения;
быть оборудован визуальными, звуковыми или обоими средствами для определения нормальной работы и предупреждения терпящих бедствие о том, что РЛО приведйн в действие каким-либо радиолокатором;
обеспечить ручное включение и выключение; могут быть предусмотрены средства автоматического включения. (Если проводится испытаание на судне с использованием судоваого радиолокатора, работающего на частоте 9 ГГц, действие РЛО должно быть ограничено до нескольких секунд, чтобы избежать вредных помех на другие судовые радиолокаторы и чрезмерного расхода заряда батареи).
обеспечивать индикацию в режиме ожидания;
обладать прочностью, чтобы выдерживать падение в воду с высоты 20 метров без повреждений;
быть непроницаемым на глубине 10 метров, по крайней мере, в течение 5 минут;
сохранять водонепроницаемость при тепловом скачке 45оС при определённых условиях погружения;
обладать плавучестью, если он не является составной частью спасательной шлюпки или плота;
если он обладает плавучестью, быть оборудованным плавучим фалинем, пригодным для использования как буксир;
противостоять воздействию морской воды или нефти;
обладать сопротивлением к разрушению при длительном воздействии солнечных лучей;
быть хорошо видимого жёлтого/оранжевого цвета по всей поверхности, где это способствует лучшему обнаружению;
иметь гладкую наружную поверхность для предотвращения повреждения спасательной шлюпки или плота;
иметь шест или другое устройство для размещения в кармане спасательной шлюпки или плота, а также иметь иллюстрированную инструкцию.
РЛО должен иметь достаточную ёмкость батареи для работы в режиме ожидания в течение 96 часов и, кроме этого, для обеспечения ответчиком передач в ответ на воздействие периодически повторяющегся запроса в течение 8 часов с частотой 1кГц.
Высота установленной антенны РЛО должна быть, по крайней мере, на 1 метр выше уровня моря.
РЛО должен правильно работать при запросе его с расстояния не менее 5 морских миль навигационным радиолокатором, при высоте антенны РЛС 15 метров. Он должен также правильно работать при запросе с расстояния не менее 30 морских миль авиационным радиолокатором при пиковой мощности, по крайней мере, 10 кВт с высоты 3000 футов.
На наружной стороне оборудования должны быть ясно указаны:
краткие инструкции по эксплуатации;
дата истечения срока службы батареи первичных элементов.
25. Градиенты навигационных параметров. Способы оцеки точности места судна при навигационных определениях. СКП и 95% погрешность в месте судна. Практический учёт погрешностей в определении места судна для безопасной навигации. Требования ИМО.
Любые измерения содержат ошибки, поэтому, измерив пеленг, дистанцию или угол и проложив на карте соответствующую изолинию, нельзя считать, что судно будет находиться на этой изолинии. Вычислить возможное смещение изолинии из-за ошибок можно, используя понятие градиента функции.
Вектор  называется градиентом – это вектор, направленный по нормали к навигационной изолинии в сторону её смещения при положительном приращении параметра, причём модуль этого вектора характеризует наибольшую скорость изменения параметра в данном месте. Этот модуль равен: называется градиентом – это вектор, направленный по нормали к навигационной изолинии в сторону её смещения при положительном приращении параметра, причём модуль этого вектора характеризует наибольшую скорость изменения параметра в данном месте. Этот модуль равен:
 . .
Если при измерении навигационного параметра U допущена ошибка ΔU и известен градиент, то смещение линии положения параллельно самой себе и определяется формулой:
 . .
Чем больше величина градиента g, тем меньше смещение линии положения при той же ошибке ΔU, тем точнее будет определение места судна.
Если при измерении навигационного параметра имела место случайная погрешность mП, град, то погрешность линии положения найдётся по формуле:
 . .
Полоса положения, ширина которой в три раза больше средней, захватывает места судна с вероятностью 99,7%. Такую полосу называют предельной полосой положения. Аналитически  вычисляется по формуле: вычисляется по формуле: , где δ –вспомогательный угол. , где δ –вспомогательный угол.
Значение угла δ получается вычислением:
 . .
Смещение линии положения в милях равно:
 , ,
где m’ - погрешность угла в дуговых минутах.
Для предотвращения навигационных аварий, связанных с посадкой на мель, наряду с другими мероприятиями предпринимались попытки нормировать требования к точности и частоте обсервации в зависимости от условий плавания. Неоднократное обсуждение этих вопросов в комитете по безопасности мореплавания Международной морской организации (ИМО) привело к созданию стандарта точности судовождения, принятому в 1983 г. на 13-й Ассамблее ИМО в резолюции А.529.
Цель принятого стандарта обеспечение руководства различного рода администраций стандартами точности судовождения, которые должны применяться при оценке эффективности работы систем,предназначенных для определения места судна, в том числе радионавигационных систем, включая спутниковые. От судоводителя требуется знать свое место на любой момент времени. В стандарте указаны факторы, влияющие на требования к точности судовождения. К ним относятся:
скорость судна, расстояние до ближайшей навигационной опасности, которой считается всякий признанный или нанесённый на карту элемент, граница района плавания.
При плавании в других водах со скоростью до 30 узлов текущее место судна должно быть известно с погрешностью не более 4% расстояния до ближайшей опасности. При этом точность места должна оцениваться фигурой погрешностей с учётом случайных и систематических ошибок с вероятностью 95%. В стандарт ИМО включена таблица, которая содержит требования к точности места, а также допустимое время плавания по счислению при условии, что гирокомпас и лаг (время плавания), соответствуют требованиям ИМО, счисление не корректировалось, погрешности имеют нормальное распределение, а течение и дрейф учитываются с возможной точностью.
С 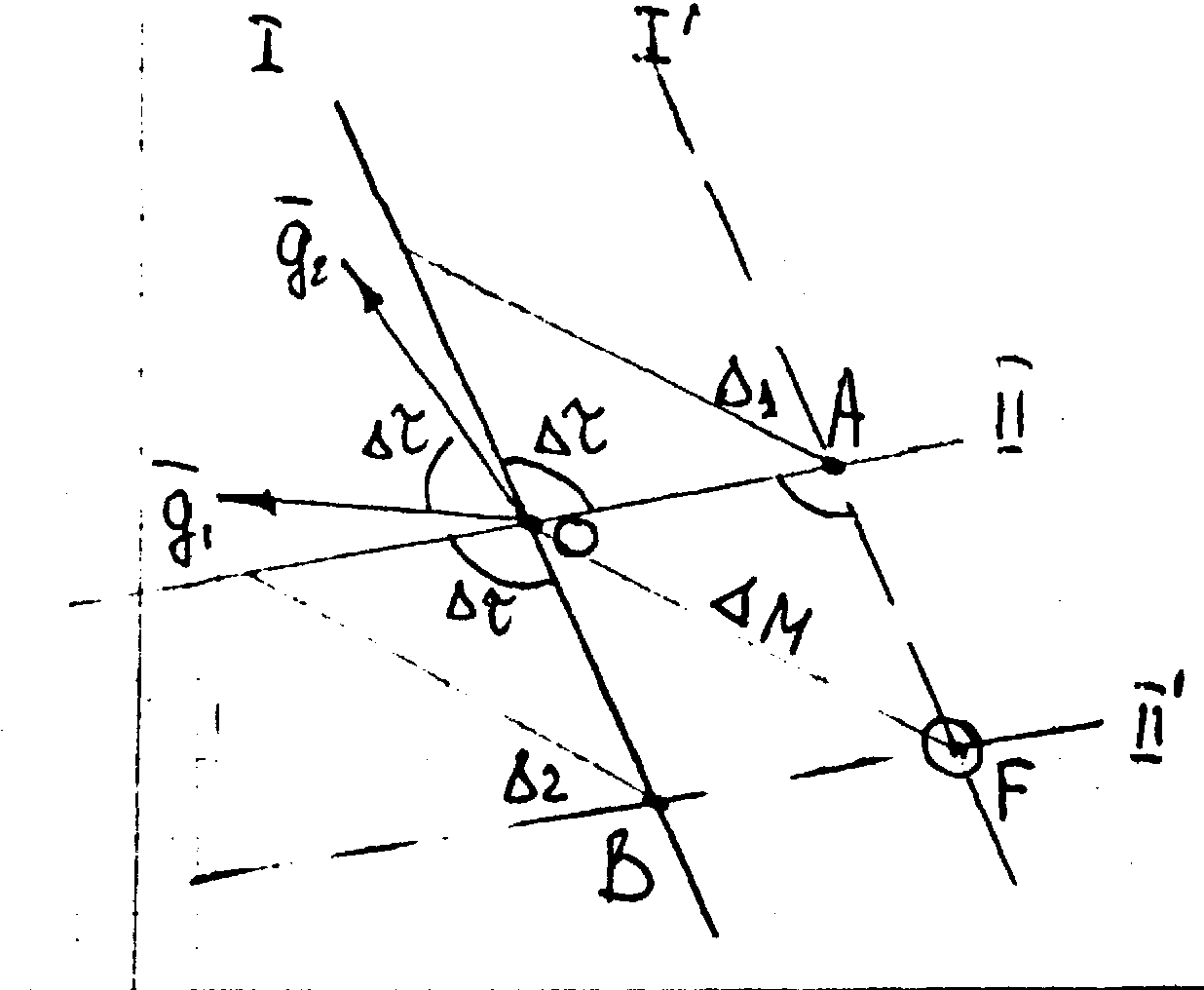 КП 95%: КП 95%:
26. Манёвры и действия вахтенного помощника при спасении человека, упавшего за борт. Способы выполнения манёвров согласно руководства MERSAR.
Падение человека за борт
В случае падения человека за борт вахтенный помощник капитана выполняет следующие действия:
- даёт команду рулевому перейти на ручное управление и, в зависимости от сложившейся ситуации и типа судна, начинает выполнение маневра "Человек за бортом" (схема маневрирования приведена),
- бросает спасательный круг;
- возвращается в рулевую рубку, включает сигнал тревоги, контролируя одновременно доклады рулевого о курсе (капитана предупреждать не следует, поскольку по тревоге он сам поднимется на мостик),
- информирует вахтенного механика;
- осуществляет наблюдение за упавшим человеком (за кругом со светодымящим буем).
С приходом капитана на мостик вахтенный помощник:
- объявляет по трансляции номер спускаемой шлюпки,
- выставляет наблюдателей,
- делает оповещение по УКВ для находящихся вблизи судов (если необходимо, запрашивает их помощь), а в случае потери пострадавшего, дает извещение серии "XXX CQ" на 500 кГц;
- подаёт судовым свистком, если это необходимо, три продолжительных звука и повторяет их по мере необходимости (приближение других судов).
- поднимает сигнал "Оскар";
- определяет место судна и передает в радиорубку координаты места падения человека за борт;
- наносит место падения человека на карту и ведет тщательное счисление пути судна на маневренном планшете с укрупненным в 10 раз масштабом, если это необходимо для учета маневрирования,
- в темное время суток включает поисковые прожекторы.
МАНЕВРИРОВАНИЕ СУДНА ПО КОМАНДЕ "ЧЕЛОВЕК ЗА БОРТОМ"
1 Практика показывает, что в зависимости от сложившейся ситуации и типа морского судна используются различные маневры судна "человек за бортом".
2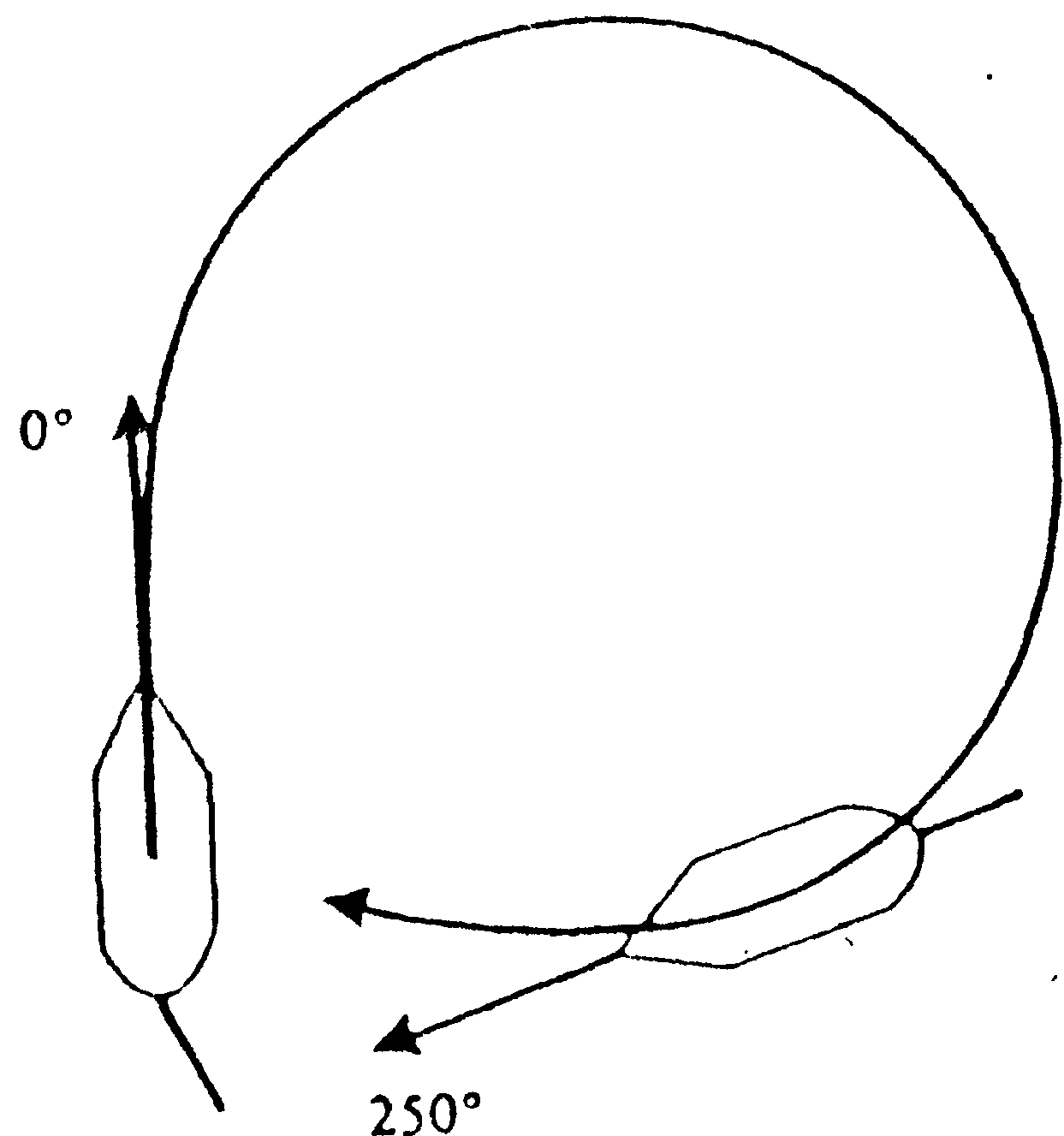 Эффективность маневров, описание которых приведено ниже, доказана в многочисленных случаях падения человека за борт, включая следующие ситуации, Эффективность маневров, описание которых приведено ниже, доказана в многочисленных случаях падения человека за борт, включая следующие ситуации,
Ситуация "Немедленное действие".
Падение человека за борт замечено с мостика, и меры принимаются немедленно.
Ситуация "Действие с задержкой".
О падении человека за борт доложил на мостик очевидец, и меры принимаются с некоторой задержкой.
Ситуация "Пропал человек".
На мостик поступило сообщение о том, что "пропал" человек.
Если судно следует полным ходом вперед, используются три стандартных маневра
А. Простой поворот (маневр 270°).
А1 Переложить руль в положение "на борт" (при ситуации "Немедленное действие" только в сторону падения человека).
А2 После отклонения от первоначального курса на 250° переложить руль в положение "прямо" и застопорить машину.
1. Ситуация «Немедленное действие».
.1.1. ПРОСТОЙ ПОВОРОТ приводит морское судно на место бедствия быстрее всего.
. 1.2. ПОВОРОТ ВИЛЬЯМСОНА требует большего времени и временно уводит судно дальше от места бедствия. 1.2. ПОВОРОТ ВИЛЬЯМСОНА требует большего времени и временно уводит судно дальше от места бедствия.
.1.3. ПОВОРОТ СКАРНОУ не применяется.
2. Ситуация «Действие с задержкой».
.2.1. ПОВОРОТ ВИЛЬЯМСОНА наиболее точно приводит морское судно на место бедствия (Когда судно достигает точки начала маневра, скорость поиска должна быть снижена таким образом, чтобы можно было быстро остановиться).
.2.2. ПОВОРОТ СКАРНОУ не может быть выполнен эффективно, если время, прошедшее между обнаружением бедствия и началом маневра. не известно.
3. Ситуация «Пропал человек».
ПОВОРОТЫ СКАРНОУ и Вильямсона позволяют судну вернуться на свой след. При ПОВОРОТЕ СКАРНОУ путь короче, и поэтому на него тратится меньше времени Когда морское судно после ПОВОРОТА СКАРНОУ легло на обратный курс, точка начала маневра будет находиться приблизительно на расстоянии одного корпуса судна по корме В зависимости от типа судна путь сокращается на расстояние 1—2 мили (см также рисунок).
П оскольку стандартные маневры "человек за бортом" не гарантируют возврата судна на свой след. необходимо регулярно тренироваться в выполнении этих маневров. оскольку стандартные маневры "человек за бортом" не гарантируют возврата судна на свой след. необходимо регулярно тренироваться в выполнении этих маневров.
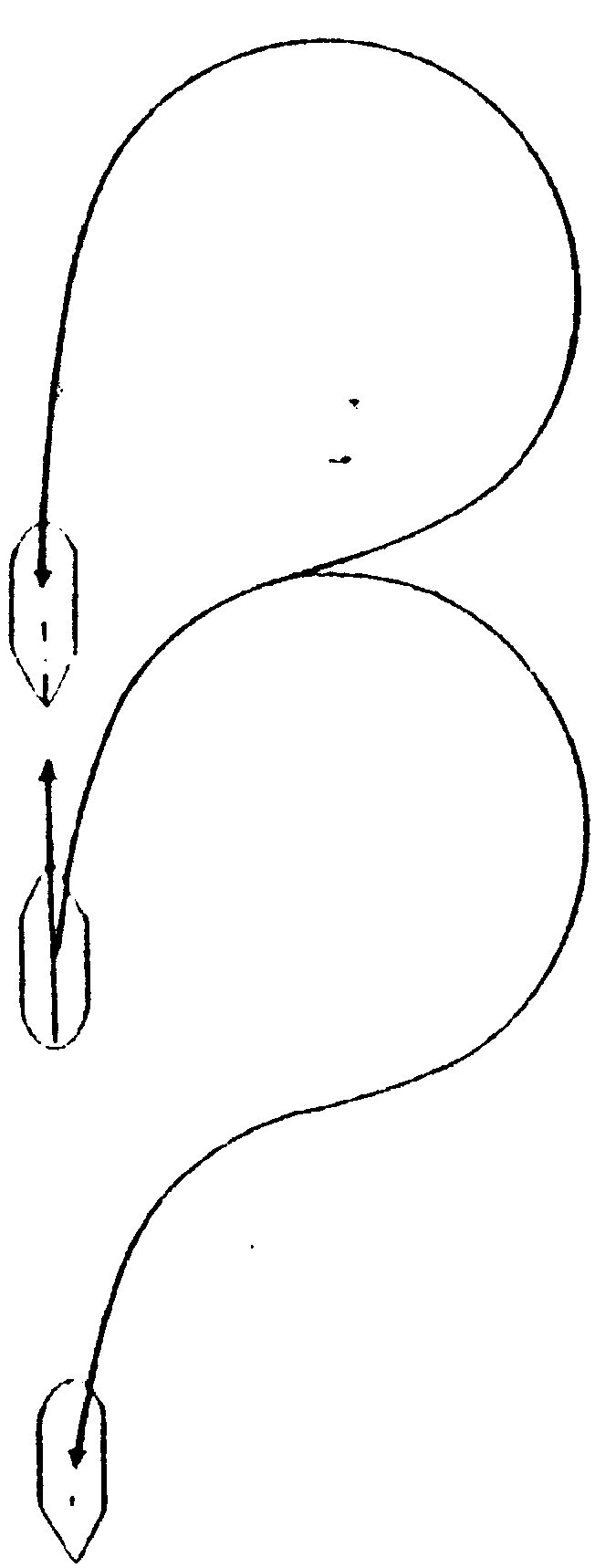
Поворот Вильямсона.
1 Переложить руль в положение "на борт" (при ситуации "Немедленное действие" только в сторону падения человека)
2. После отклонения от исходного курса на 60° переложить руль на противоположный борт.
3. Не достигнув 20° до обратного курса, переложить руль в положение "прямо" и затем лечь на обратный курс.
П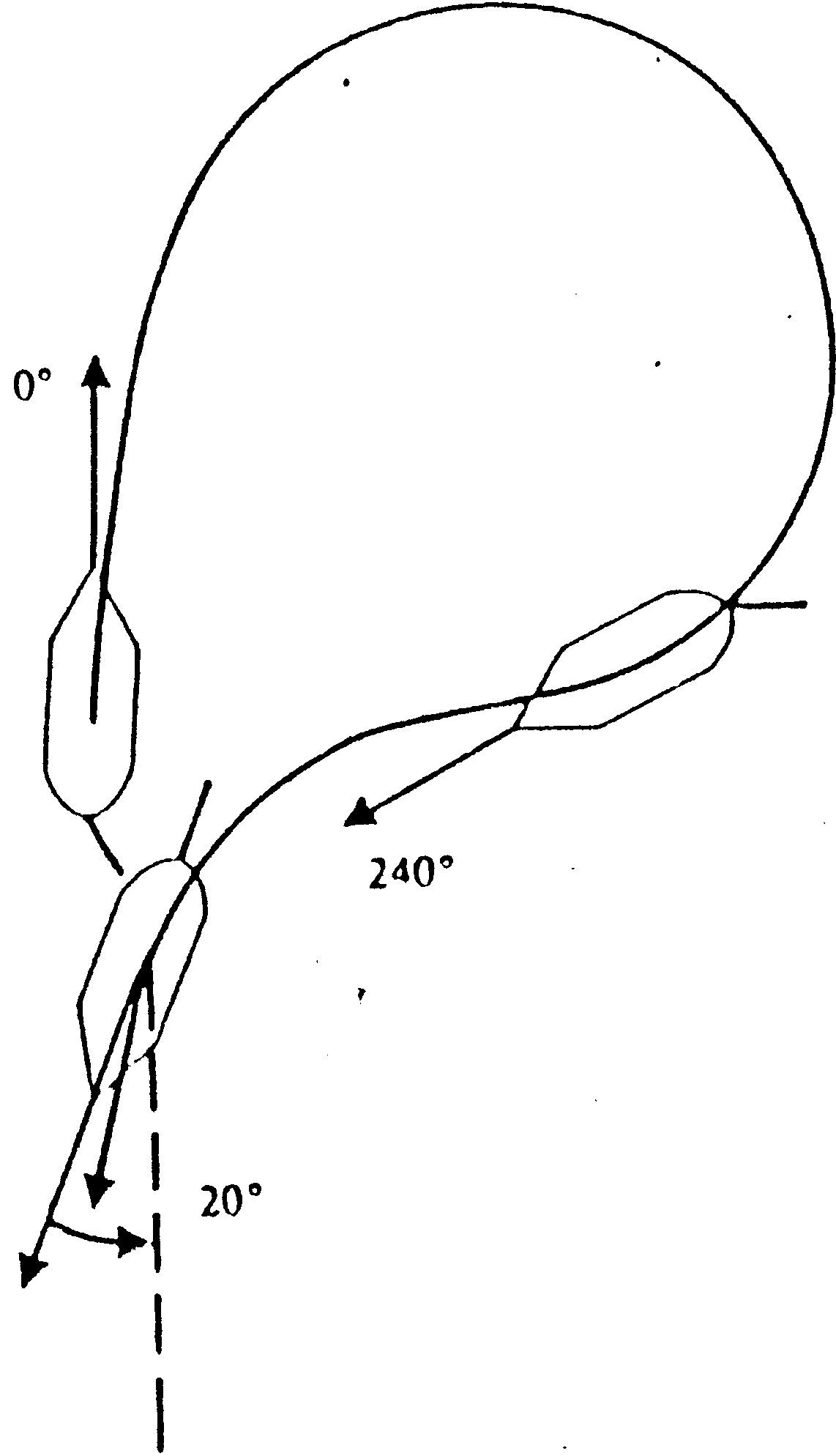 оворот Скарноу (в ситуации "Немедленное действие" не применяется). оворот Скарноу (в ситуации "Немедленное действие" не применяется).
1. Переложить руль в положение "на борт"
2. После отклонения от первоначального курса на 240° переложить руль на противоположный борт.
3. Не достигнув 20° до обратного курса, переложить руль в положение "прямо", чтобы судно затем легло на обратный курс.
27. Сущность шлюзования. Состав гидроузлов. Особенности нижнего бьефа.
28. Ортодромия, ортодромическая поправка. Способы построения ортодромии на картах меркаторской проекции.
Ортодромия (ДБК – дуга большого круга), является кратчайшим расстоянием между двумя точками на земной сфере. Ортодромия АВ обращена выпуклостью к ближайшему полюсу и пересекает меридианы под различными углами, она всегда короче локсодромии или равна ей. В высоких широтах и на больших переходах целесообразно выбирать маршрут по ортодромии. Разность между ортодромией и локсодромией можно получить по формулам:
Для нанесения на меркаторскую карту ДБК используют уравнение ортодромии:
 , где , где
λо – долота точки пересечения экватора ортодромией;
Ко – угол между меридианом и ортодромией в точке пересечения экватора;
φi, λi – текущие координаты.
Задаваясь долготой λi, получают широту φi точки на заданном меридиане. Значения Ко и λо вычисляются предварительно:

Важным параметром ортодромии является направление ортодромии в начальной точке:
 . .
П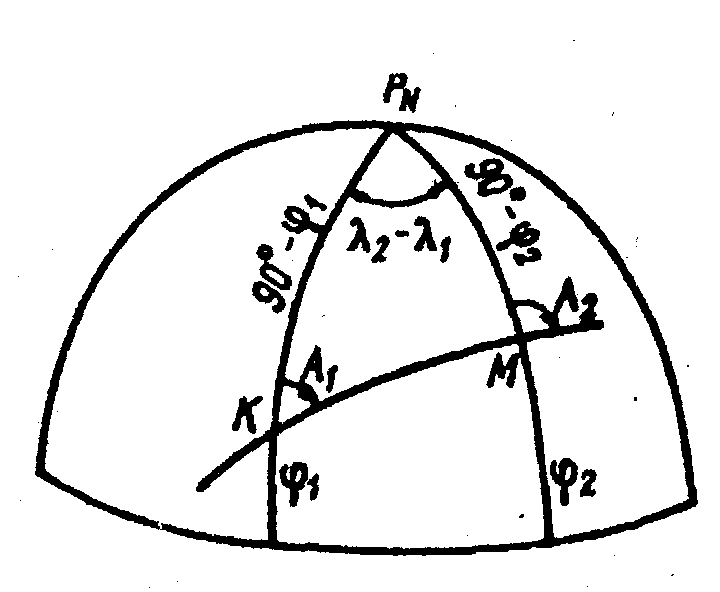 лавание экономически выгоднее совершать не по касательным к ортодромии Кн, а по хордам. Угол между касательной и хордой будет равен ортодромической поправке ψ. Следовательно, общий принцип расчёта плавания по ортодромии состоит в расчёте начального курса Кн, выборе отрезка плавания S для лавание экономически выгоднее совершать не по касательным к ортодромии Кн, а по хордам. Угол между касательной и хордой будет равен ортодромической поправке ψ. Следовательно, общий принцип расчёта плавания по ортодромии состоит в расчёте начального курса Кн, выборе отрезка плавания S для и получения истинного курса: ИК = Кн + ψ. и получения истинного курса: ИК = Кн + ψ.
Расчёт начального курса может быть выполнен с использованием таблицы ортодромических поправок. Для этого на мелкомасштабной карте соединяют точки А и В, снимают значение локсодромического курса, выбирают из таблицы 23-б МТ-75 угол ψобщ и вычисляют Кн = ЛокК1 - ψобщ. Пользуясь таким приёмом, ортодромию можно нанести на карту, повторяя вычисления для двух, трёх и более точек. Для сокращения расчётов издаются карты в гномонической проекции, на которых ортодромия изображается прямой линией. Соединяя начальную и конечную точки, получают ортодромию, координаты которой затем переносят на меркаторскую карту. На гномонических картах имеются таблицы и номограммы для расчёта длины ортодромии и начального курса.
2 9. Управляемость судна при плавании в каналах. 9. Управляемость судна при плавании в каналах.
Когда путь судна в канале смещен к одному из берегов, распределение давления по его бортам различно. На рис. 23.2 показаны высоты уровня воды по бортам такого судна, что является внешним проявлением распределения поля давления. Штриховая кривая дает характер изменения уровня воды со стороны борта, ближайшего к откосу (стенке) канала. Сплошная кривая дает уровень воды со стороны борта, обращенного к его оси. Обращает на себя внимание значительное понижение уровня воды на протяжении средней части корпуса судна и то, что в кормовой части уровень хотя и поднимается, но не достигает среднего значения. Этим объясняется то, что судно, идущее не по оси канала, будет испытывать отталкивание носовой части от берега. Кормовая часть, наоборот, будет стремиться сблизиться с берегом.
Для удержания судна на курсе потребуется перекладка руля преимущественно в сторону берега. Отталкивание носовой части от берега будет проявляться тем более резко, чем больше скорость судна. Для улучшения управляемости в данном случае будет разумным уменьшение скорости, чтобы не допускать высоких волн. так как на значительном ходу отталкивание носовой части может достичь такого значения, что судно «бросится» к оси канала, пересечет его и пойдет в сторону противоположного берега. При небольшой ширине канала может произойти навал на берег или касание бровки канала.
Рис. 23.2. Профиль волны вокруг судна. идущего не по оси канала
Кроме того, с увеличением расстояния от оси канала будет увеличиваться проседание судна, которое зависит от скорости судна и глубины под килем.
МАНЕВРИРОВАНИЕ СУДОВ В УЗКОСТЯХ И НА МЕЛКОВОДЬЕ.
Большого внимания, учета всех изложенных выше обстоятельств и знания особенностей своего судна требует от судоводителя плавание на судоходных участках рек и в каналах с двусторонним движением, где часты случаи расхождения со встречными судами.
Как уже было сказано, область повышенного давления будет находиться в носовой части судна, а пониженного — в районе средней (рис. 23.2). При расхождении сдуов на влияние глубин и берегов канала будет накладываться действие гидродинамических полей расходящихся судов. Действие всех сил будет зависеть от относительного положения судов, их скоростей, размеров и характера потоков жидкости. обтекающей их корпус.
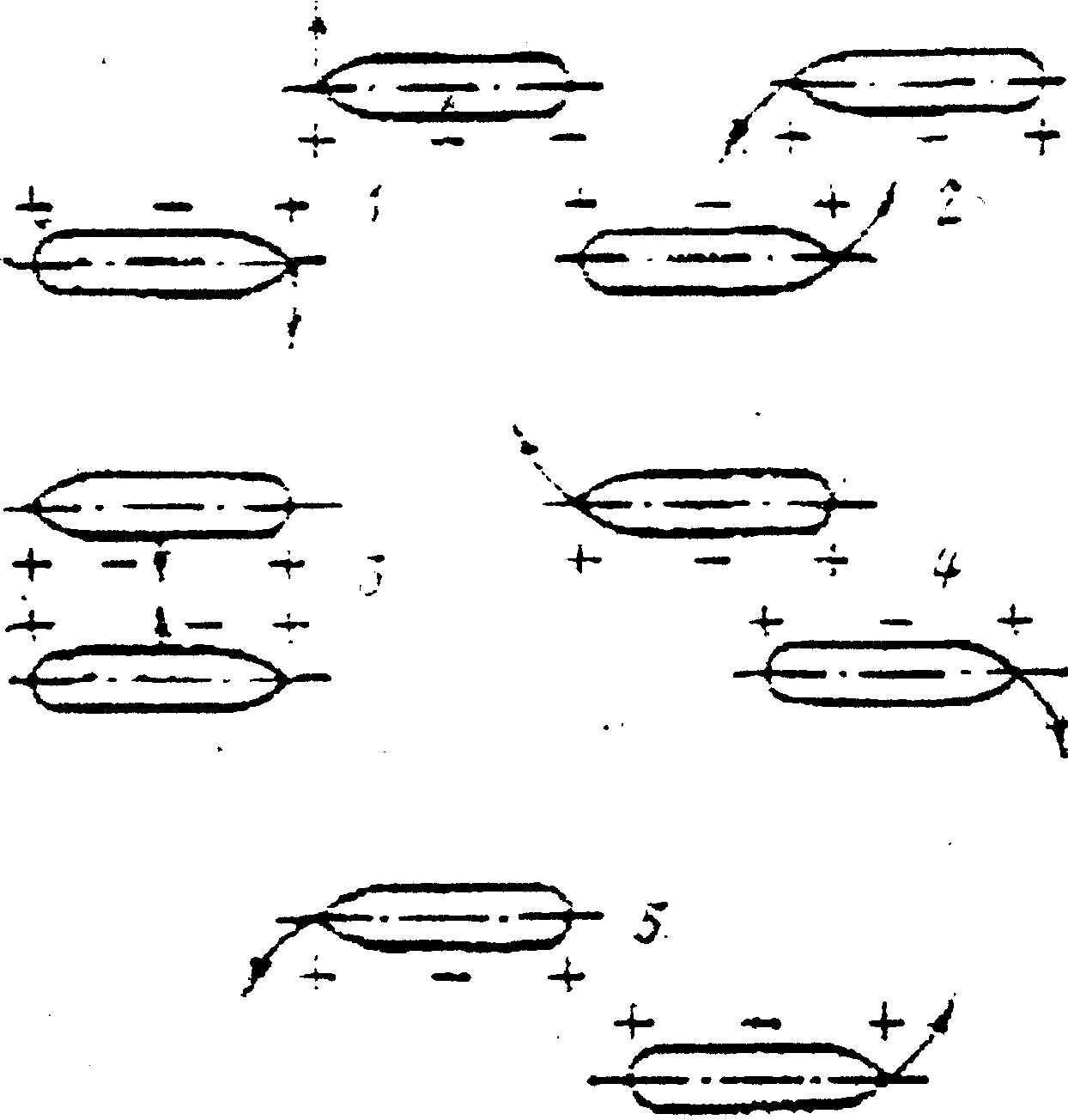
Общая схема взаимодействия гидродинамических полей судов при расхождении представлена Рис. 23.3. В положении 1 под влиянием областей повышенного давления обоих судов они будут стремиться уклониться в разные стороны: в положении 2 массы воды устремляются к области пониженного давления, увлекая за собой носовые части встречных судов. Это самый опасный момент во всей ситуации. В положении 3 в узком пространстве между бортами скорость течения воды увеличивается, давление станет меньше, чем со стороны наружных бортов. Суда будут стремиться сблизиться бортами. В положении 4 кормовые части судов будут находиться напротив областей пониженного давления встречных судов и по той же причине, что и в положении 2. будут стремиться сблизиться с ними. В положении 5 кормовая часть каждого судна будет стремиться отклониться от кормы встречного судна. Описанное явление будет выражено тем резче, чем меньше расстояние между встречными судами и больше их скорость. Большему влиянию подвергается меньшее из встречных судов.
Для уменьшения влияния гидродинамических сил при расхождении рекомендуется иметь траверзное расстояние между ближайшими бортами не менее трехкратной ширины меньшего из судов и скорость, не превышающую значения:

Кроме того, необходимо учитывать наличие других попутных и встречных судов и влияние берега канала или реки.
В общем случае взаимодействие гидродинамических сил при обгоне судов будет таким же, но здесь траверзное расстояние между ними становится опасным, если оно не превышает шестикратной ширины меньшего из судов. Объясняется это тем, что при обгоне взаимодействие судов более длительно и опасность столкновения больше.
В некоторых каналах, с учетом сказанного выше, установлены правила, при которых расхождение со встречными судами возможно но только, если суда, идущие в противоположном направлении, швартуются к причалам у стенки канала.
В таких случаях также необходимо учитывать влияние гидродинамического поля проходящего судна. Когда оно подходит к ошвартованному у причала судну, то последнее под влиянием носовой волны будет стремиться двигаться от него вдоль причала. Когда форштевень проходящего судна подойдет к судну, стоящему у причала, то ближайшая оконечность последнего будет стремиться прижаться к причалу, а противоположная — отойти от него. После того как идущее судно поравняется со стоящим у стенки, все явления будут повторяться в обратном порядке под влиянием кормовой волны. Те же явления наблюдаются и в портах, когда судно проходит мимо стоящих у причалов судов. Во всех указанных случаях идущее судно должно иметь минимальную скорость. Команды стоящих судов должны внимательно наблюдать за швартовами и потравливать их, чтобы избежать обрыва. В таких случаях наиболее применимы манильские или синтетические тросы как более эластичные.
При плавании в узкостях необходимо учитывать влияние всех факторов и окружающей обстановки на управляемость судна. Например, судно в узкостях стремится идти в сторону больших глубин или выступа в стенке канала, образующего его уширение. Это объясняется уменьшением трения в указанных направлениях и большим давлением в носовой части с противоположного борта. На мелководье при Fr < 0,5 управляемость практически та же, то и на глубокой воде.
При 0,5 < Fr
В узкостях большое значение имеет влияние течения и ветра на циркуляцию судна. Когда судно совершает повороты на течении, траектория его движения, сохраняя свой характер (относительно воды), будет смещена по течению относительно грунта. При известных циркуляции судна и элементах действующего течения судоводитель с достаточной степенью точности может получить путь движения судна на повороте.
Ветер также оказывает влияние на циркуляцию. В данном случае по причине смещения судна относительно воды (дрейфа) траектория движения его будет растянута под ветер.
При плавании по рекам и некоторым проливам необходимо учитывать обстоятельства плавания на встречном и попутном течениях.
В случае встречного течения скорость судна относительно берегов будет уменьшена на значение скорости течения. Это даст судоводителю больше времени для наблюдения за окружающей обстановкой и, кроме того, позволит в случае необходимости быстро остановить судно относительно грунта и избежать навала на береговые сооружения и стоящие на якоре или у причала суда. Однако следует иметь в виду, что судно будет хорошо управляться только в том случае, если оно следует точно против течения.
На попутном течении его скорость прибавляется к скорости судна. Это сокращает время наблюдения за окружающей обстановкой, усиливает угрозу навала на стоящие суда и береговые сооружения, но здесь судно легче привести на курс.
Крутые изгибы реки требуют от судоводителя большой внимательности и осторожности. В таких случаях и на встречном, и на попутном течении необходимо следовать при одностороннем движении строго по оси фарватера, а при двустороннем — по линии, ей параллельной. Преждевременные или запоздалые повороты на течении, когда диаметральная плоскость судка образует какой-то угол с его направлением. могут привести к тому, что судно не сможет выровнять курс и будет прижато к берегу.
На крутых поворотах в узкостях может появиться крен судна, который вызовет увеличение его осадки. Принимая во внимание, что абсолютное большинство современных судов имеет прямоугольную форму сечения по миделю, увеличение осадки при углах крена до 6—8° можно подсчитать по формуле
где В — ширина судна, м; Θ — угол крена, °.
Все вышесказанное, а также действующие на флоте инструкции и положения позволяют изложить рекомендации для плавания в узкостях.
До входа в стесненные воды независимо от предполагаемой лоцманской проводки необходимо тщательно изучить по картам и руководствам для плавания район предстоящего плавания и действующие местные правила и выполнить предварительную прокладку.
При изучении пособий и руководств для плавания особое внимание следует обращать на;
узкие проходы, крутые изгибы фарватеров, малые глубины, где запрещены или опасны обгон судов и расхождение с ними;
участки с резко меняющимися глубинами, а также с неодинаковыми расстояниями от оси фарватера до берега или откосов канала;
районы в реке или канале, где возможна стоянка судов на якоре или у причалов.
Далее следует проверить наличие створов на отдельных коленах фарватера, обращая внимание на переходы с одного створа на другой; на необорудованных участках фарватера — наметить естественные ориентиры, которые могут служить створами.
При подготовке к плаванию в узкостях надо учитывать возможное увеличение осадки по различным причинам: проседание корпуса при плавании на ограниченных глубинах;
увеличение дифферента на корму, зависящее от скорости и особенно резко выраженное в каналах;
увеличение осадки в распресненных водах;
приливно-отливные и сгонно-нагонные колебания уровня моря:
качка и орбитальное движение судна в районах, куда заходит морская зыбь.
Кроме того, необходимо иметь запас под килем, который для судна среднего тоннажа в зависимости от характера грунта можно принять равным от 0,6 до 1 м.
При подходе к мелководным районам и на всем пути следования в узкостях надо обеспечить должную остойчивость судна не допускать перекачки балласта или жидких грузов. Палубные грузы и грузовые стрелы следует держать закрепленными с учетом того, что на крутых поворотах утлы крена могут быть значительными. Убирать крепления допускается только в порту назначения, в условиях, где нет угрозы подвижки груза.
Вахта в машинном отделении должна быть предупреждена о входе в узкость. Старший механик должен находиться в машинном отделении во все время следования в стесненных водах и отлучаться только с разрешения капитана.
Главный двигатель необходимо заблаговременно перевести на маневренный режим в соответствии с инструкцией по эксплуатации.
Перед входом в узкость необходимо:
сличить показания судовых часов на мостике и в машинном отделении;
согласовать репитеры гирокомпаса, сделать отметку времени на ленте курсографа;
проверить действие радиолокатора и сделать обзор окружающей обстановки на шкалах разного масштаба;
проверить работу машинного телеграфа;
опробовать средства звуковой и световой сигнализации и навигационные огни, а также средства внутрисудовой связи;
если требуется, подготовить сигналы для судна с большой осадкой, которое может следовать только в пределах фарватера;
подготовить сигналы, требующиеся по местным правилам, если таковые действуют в данном районе, а также присоединить к фалам сигналы для судна, лишенного возможности управляться.
Рулевое устройство, включая запасное и аварийное, надо проверить и в течение всего перехода в узкостях вести за ним неослабное наблюдение; включить дублирующий рулевой насос или мотор, на руль поставить опытного матроса первого класса.
На бак следует вызвать боцмана или лицо, его заменяющее. Якоря должны быть подготовлены к отдаче и удерживаться только ленточными стопорами.
При плавании в стесненных водах необходимо строго выполнять местные правила плавания и следовать с установленной скоростью, ограничение которой вызвано необходимостью обеспечить:
наименьшее сопротивление воды движению судна и минимальный расход топлива;
наилучшую управляемость судна: уменьшение проседания корпуса судна и дифферента на корму:

уменьшение угрозы присасывания при обгонах судов и расхождении с ними;
сохранение откосов и стенок канала;
уменьшение угрозы обрыва швартовов судна, стоящих у причалов рек и каналов, и навала на них.
Во всех случаях расхождения с судами, прохода узких мест и в других случаях, когда необходимо обеспечить лучшую управляемость, следует плавно снижать скорость судна.
Резкое уменьшение скорости может привести к тому. что судно, поднятое на собственной кормовой волне, потеряет управляемость.
Для обеспечения безопасности плавания крупнотоннажные суда в узкостях должны пользоваться помощью буксирных судов. Расстановка их в зависимости от тоннажа и осадки проводимого судна показана на рис. 23.4. а. б. В таких случаях с кормы и носа буксируемого судна подают не одинарные, а двойные буксиры (усы). Расходиться с судами и обгонять их следует, учитывая сказанное выше и местные правила. При отсутствии местных правил следует руководствоваться хорошей морской практикой.
Рис. 23.4. Буксировка крупно- тоннажных судов в узкостях
При плавании в стесненных водах надо учитывать наличие находящихся поблизости судов и быть готовым к их непредвиденным действиям.
В пути следования необходимо учитывать действие ветра и течения и тщательно вести счисления. Судить о фактических скорости и направлении течения можно по струям у знаков плавучего ограждения. Во всех случаях маневрирования следует учитывать действие ветра и течения на циркуляцию судна и в соответствии с ним выбирать сторону поворота.
При ухудшении погоды и ограничении видимости необходимо действовать в зависимости от обстоятельств и условий плавания.
30. Назначение и состав ECDIS. Понятие электронной навигационной карты (ENC) . Понятие системной электронной карты (SENC). Резолюция ИМО А817(19).
|
|
|
 Скачать 3.3 Mb.
Скачать 3.3 Mb.