шпора 1. Шпора 1. 1. Статические и динамические моменты. Механическая характеристика механизма. Уре движения
 Скачать 1.35 Mb. Скачать 1.35 Mb.
|

|
Потери мощности ΔР в электродвигателе удобно представить суммой двух составляющих потерь - постоянных К и переменных И, т. е. ΔР = К+V. (8.1). Под постоянными подразумеваются потери мощности, не зависящие от нагрузки двигателя. К ним относятся потери в стали магнитопровода, механические потери от трения в подшипниках и вентиляционные потери. В СД и двигателе постоянного тока с независимым возбуждением к постоянным потерям обычно относят и потери в обмотках возбуждения. Под переменными подразумеваются потери, выделяемые в обмотках двигателей при протекании по ним токов, определяемых механической нагрузкой ЭП. Переменные потери мощности в двигателе могут быть в общем случае определены через электрические или механические переменные и параметры. В двигателях постоянного тока переменные потери мощности V = I2R (8.2), где I, R - соответственно ток и сопротивление цепи якоря двигателя. В трехфазных асинхронных двигателяx V=V1+V2=3I12R1+3I2`2R2`, где V1, V2 - потери мощности соответственно в цепях обмоток статора и ротора. В синхронных двигателях V=3I12R1. Потери мощности при работе двигателя в номинальном режиме определяются по его паспортным данным с помощью номинального КПД и номинальной мощности двигателя: ΔPНОМ= PНОМ(1-ηНОМ)/ηНОМ. (8.7) Постоянные потери мощности: К=ΔPНОМ-VНОМ. П  отери энергии в двигателе. За время работы tp двигателя с постоянной нагрузкой полные потери энергии, обусловленные К и V, ΔА=ΔPtp (8.9). При работе двигателя с циклически изменяющейся нагрузкой полные потери энергии за весь цикл отери энергии в двигателе. За время работы tp двигателя с постоянной нагрузкой полные потери энергии, обусловленные К и V, ΔА=ΔPtp (8.9). При работе двигателя с циклически изменяющейся нагрузкой полные потери энергии за весь цикл где ΔPi, ti - потери мощности и время работы на i-м участке цикла; m - число отдельных участков цикла, (сумма та на рис.)ti=tц - время цикла. Потери мощности и энергии в преобразователе являются электрическими и определяются по формулам (8.2) и (8.9). При использовании для управления двигателями полупроводниковых преобразователей потери в них складываются из потерь в вентилях, трансформаторах, сглаживающих и уравнительных реакторах, фильтрах и элементах устройств искусственной коммутации. Потери в полупроводниковых элементах преобразователей обычно относительно малы (несколько процентов от номинальной мощности). При расчете потерь в трансформаторах и реакторах берется сопротивление их обмоток или эквивалентное сопротивление преобразователя, определяемое формулой (4.34). Потери мощности в маломощной системе управления обычно не превышают нескольких десятков ватт и принимаются во внимание только при выполнении точных энергетических расчетов. Потери мощности в механической передаче определяются главным образом трением в движущихся частях и существенно зависят от передаваемого момента. Потери в механической передаче обычно оцениваются с помощью КПД, значение которого для разных ее видов и нагрузок приводятся в справочной литературе. 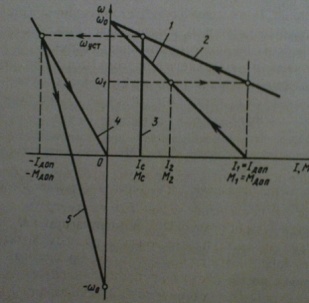 21. Пуск двигателя сначала происходит по искусственной характеристике 1 с резистором Щ в цепи якоря, называемым пусковым. В момент включения двигателя его ток и момент ограничиваются до заданного (допустимого) уровня В В /доп и А/, 1 А/доп. По мере увеличения скорости и соответственно ЭДС двигателя ток в якоре снижается, и при скорости со, резистор может быть закорочен (выведен из цепи якоря). Двигатель переходит на работу по естественной характеристике 2, при этом броски тока и момента также не превышают заданного уровня. Завершается пуск двигателя после достижения им скорости НЦ определяемой точкой пересечения характеристик двигателя 2 и исполнительного органа 3. Совокупность двух или более искусственных характеристик, используемых при пуске двигателя, называется пусковой диаграммой. При ее расчете и построении заданными параметрами являются: допустимые ток I § или момент М | момент нагрузки А/., пределы изменения тока (момента) или число искусственных характеристик т, соответствующее числу ступеней пускового резистора. Пуск двигателя начинается по характеристике 3. При скорости со,, когда ток снизится до значения Щ ключом К1 закорачивается ступень Кл} и двигатель уже по характеристике 2 продолжает свой разбег. При скорости со2 ключом закорачивается ступень ЩЯ и двигатель начинает работать на естественной характеристике 1. 22. Метод средних потерь является наиболее точным и универсальным из косвенных методов. Сущность этого метода заключается в определении средних потерь мощности АР^ за цикл работы двигателя и сопоставлении их с номинальными потерями мощности ДРном, после чего делается заключение о нагреве двигателя. При использовании метода средних потерь рассматривается достаточно удаленный цикл работы двигателя, в котором средний перегрев его не изменяется. Метод средних потерь позволяет оценить тепловой режим работы двигателя по среднему превышению температуры. В этом заключается определенная погрешность метода, поскольку максимальный перегрев двигателя на отдельных участках цикла может превышать т . Точность оценки нагрева этим методом тем выше, чем больше постоянная нагрева двигателя Г превышает значение /пих наиболее продолжительного участка цикла работы двигателя, т. е. в случае выполнения неравенства tmax < Тн. При этом тср= тmax. Методы эквивалентных величин основываются на методе средних потерь. Метод эквивалентного тока целесообразно использовать в том случае, когда известен график изменения тока двигателя во времени, который может быть получен расчетным путем или экспериментально. Д  ля получения расчетной формулы метода эквивалентного тока представим в соответствии с средние потери мощности в двигателе как сумму постоянных К и переменных V потерь: ля получения расчетной формулы метода эквивалентного тока представим в соответствии с средние потери мощности в двигателе как сумму постоянных К и переменных V потерь:С учетом условие проверки двигателя по нагреву после некоторых преобразований будет иметь вид: Ток эквивалентен по условиям нагрева действительному изменяющемуся во времени току двигателя. Итак, в соответствии с формулой (9.21) средний нагрев двигателя не будет превосходить допустимого (нормативного) уровня, если эквивалентный ток за цикл его работы не будет превосходить номинального (паспортного) тока. Формула (9.21) справедлива, если постоянные потери не изменяются за цикл работы, а сопротивления главных цепей двигателя остаются неизменными в цикле работы. Следовательно, если постоянные потери или сопротивление главных цепей двигателя из- меняются, то метод эквивалентного тока даст погрешность в оценке теплового состояния двигателя. Метод эквивалентного момента удобно использовать в том случае, когда известен график изменения момента двигателя во времени М(г). В дополнение к указанным условиям применения метода эквивалентного тока при использовании метода эквивалентного момента должно соблюдаться еще одно условие - постоянство магнитного потока двигателя на протяжении всего цикла работы. Метод эквивалентной мощности используется, если известен график изменения мощности во времени, и при условии постоянства постоянных потерь, магнитного потока и скорости двигателя на всех участках рабочего цикла. √  ( ( )/ )/ = =  = =  < < 23. Изменение магнитного потока используется преимущественно для регулирования скорости. Этот способ находит широкое применение в ЭП вследствие простоты его реализации и экономичности, так как регулирование осуществляется в относительно маломощной цели возбуждения двигателя и не сопровождается большими потерями мощности. М  агнитный поток при регулировании скорости обычно уменьшают по сравнению с номинальным (точка А на кривой намагничивания) за счет снижения тока возбуждения, так как его увеличение выше номинального вызывает дополнительный нагрев обмотки возбуждения. Кроме того, двигатель рассчитывается и конструируется таким образом, что бы его магнитная система была близка к насыщению, поэтому увеличение тока возбуждения не приводит к заметному увеличению магнитного потока. Уменьшение магнитного потока приводит к увеличению скорости идеального холостого хода ш0. Ток короткого замыкания агнитный поток при регулировании скорости обычно уменьшают по сравнению с номинальным (точка А на кривой намагничивания) за счет снижения тока возбуждения, так как его увеличение выше номинального вызывает дополнительный нагрев обмотки возбуждения. Кроме того, двигатель рассчитывается и конструируется таким образом, что бы его магнитная система была близка к насыщению, поэтому увеличение тока возбуждения не приводит к заметному увеличению магнитного потока. Уменьшение магнитного потока приводит к увеличению скорости идеального холостого хода ш0. Ток короткого замыкания  = U/ = U/ , т.е. от магнитного потока не зависит и при его варьировании будет оставаться неизменным. , т.е. от магнитного потока не зависит и при его варьировании будет оставаться неизменным. Показатели данного способа регулирования скорости ДПТНВ следующие: диапазон регулирования 3...4; направление регулирования - вверх от естественной характеристики; плавность регулирования определяется плавностью регулирования тока возбуждения; стабильность скорости достаточно высокая, хотя она и снижается при уменьшении магнитного потока. Способ экономичен, так как регулирование скорости не сопровождается значительными потерями мощности, а реализация его не требует больших капитальных затрат. 24. Повторно-кратковременный номинальный режим работы (83) характеризуется чередованием периодов нагрузки / (рабочие периодов) с периодами отключения двигателя / (паузами), причем как рабочие периоды, так и паузы не настолько длительны, чтобы превышения температуры могли достигнуть установившихся значений. Для повторно-кратковременного режима работы выпускаются специальные серии двигателей. В каталогах на них указывается номинальная мощность Р при нормативной продолжительности включения ПВноы = 15, 25, 40, 60 и 100%. Длительность рабочего цикла /ц для них не должна превышать 10 мин, в противном случае двигатель считается работающим в продолжительном режиме. Если при повторно-кратковременном режиме ПВ и мощность нагрузки равны (или близки) номинальным данным двигателя, то проверка его по нагреву не требуется, поскольку работа при таких параметрах нагрузочной диаграммы гарантируется заводом-изготовителем. 25. Данный способ широко используется для регулирования любых координат ЭП при высоких требованиях к показателям его качества. По этой причине до недавнего времени он являлся основным при создании регулируемых ЭП постоянного тока. Реализация этого способа предусматривает питание якоря ДПТНВ от преобразователя, выходное напряжение которого регулируется по значению и может изменяться при необходимости по полярности. Поскольку основным источником питания ЭП служит сеть переменного тока, то таким преобразователем является управляемый выпрямитель (УВ). Напряжение на выходе УВ вследствие наличия внутреннего сопротивления Яп о Обмотка возбуждения ДПТНВ питается от отдельного источника постоянного тока, например от неуправляемого или тоже управляемого выпрямителя. П  ри изменении Еп пропорционально изменяется скорость идеального холостого хода ри изменении Еп пропорционально изменяется скорость идеального холостого хода  на хар-ках изменяется, а наклоп нет. Получаемые искусственные характеристики 2... 8 (см. рис. 4.11,6), оставаясь линейными и параллельными друг другу, имеют по сравнению с естественной характеристикой 1 ДПТНВ больший наклон из-за наличия сопротивления Rп в выражении для определения перепада скорости (отметим, что естественная характеристика 1 соответствует питанию двигателя от источника с нулевым внутренним сопротивлением). Характеристики располагаются во всех четырех квадрантах параллельно друг другу; при Е=0 ДПТ работает в режиме динамического торможения. на хар-ках изменяется, а наклоп нет. Получаемые искусственные характеристики 2... 8 (см. рис. 4.11,6), оставаясь линейными и параллельными друг другу, имеют по сравнению с естественной характеристикой 1 ДПТНВ больший наклон из-за наличия сопротивления Rп в выражении для определения перепада скорости (отметим, что естественная характеристика 1 соответствует питанию двигателя от источника с нулевым внутренним сопротивлением). Характеристики располагаются во всех четырех квадрантах параллельно друг другу; при Е=0 ДПТ работает в режиме динамического торможения.Управляемый выпремитель может электромашинным в системе «генератор- двигатель» или полупроводниковым в системе «тиристорный преобразователь - двигатель». Система «генератор - двипг этой системе, схема которой В на рис. 4.12, якорь 4 двигателя I ИН^И7-Щ— НН^Н редственно присоединяется к яко| (О водным двигателем 1 электромашину ный выпрямитель 2 трехфазного переменного тока в постоянный, вращающийся со скоростью сог. Регулирование напряжения на якоре двигателя происходит за счет изменения тока возбуждения генератора /вг с помощью потенциометра 8, при этом изменяется ЭДС | генератора Ет и соответственно напряжение на якоре двигателя V. Регулирование напряжения в этой системе может сочетаться с воздействием на магнитный поток двигателя, что обеспечит двухзонное регулирование скорости. Основными достоинствами системы Г - Д являются большой диапазон и плавность регулирования скорости двигателя, высокая жесткость и линейность характеристик, возможность получения всех энергетических режимов работы, в том числе и рекуперативного торможения. В то же время для нее характерны такие недостатки, как утроенная установленная мощность системы, низкий КПД, инерционность процесса регулирования скорости, шум при работе. Система «тиристорный преобразователь - двигатель». Основным типом преобразователей, применяемых в настоящее время в регулируемых ЭП постоянного тока, являются полупроводниковые статические преобразователи и, в первую очередь, тиристорные. Они представляют собой управляемые реверсивные или нереверсивные выпрямители, собранные по нулевой или мостовой однофазной или трехфазной схемам. Определенные перспективы связаны с использованием в них силовых транзисторов, которые в настоящее время применяются в основном для импульсного регулирования напряжения в ЭП небольшой мощности. Управляемый выпрямитель (преобразователь) включает в себя согласующий трансформатор Т, имеющий две вторичные обмотки, два тиристора У31 и У32, сглаживающий реактор с индуктивностью Ь и систему импульсно-фазового управления СИФУ. Обмотка возбуждения двигателя ОВМ, питается от своего источника. Выпрямитель обеспечивает регулирование напряжения на двигателе за счет изменения среднего значения своей ЭДС Еп. Это достигается с помощью СИФУ, которая по сигналу I/ изменяет угол управления тиристорами а (угол задержки открытия тиристоров У81 и У82 относительно момента, когда потенциал на их анодах становится положительным по сравнению с потенциалом на катоде). Когда а = 0, т. е. тиристоры У81 и У82 получают импульсы управления 1/а от СИФУ в указанный момент, преобразователь осуществляет двух- полупериодное выпрямление и на якорь двигателя подается полное напряжение. Если с помощью СИФУ подача импульсов управления на тиристоры У81 и У82 происходит со сдвигом (задержкой) на угол о * 0, то ЭДС преобразователя снижается, а следовательно, уменьшается среднее напряжение, подводимое к двигателю.   Особенностью характеристик двигателя при его питании от УВ является наличие области (заштрихована на рисунке 4.13, б), где его характеристики нелинейны. В этой области двигатель работает в режиме прерывистого тока, что определяет заметное изменение (уменьшение) жесткости характеристик. Вследствие односторонней проводимости преобразователя характеристики располагаются только в первом (/...5 при а = 0; 30, 60е) и четвергом Щ7 при а = 90, 120, 150, 180°) квадрантах. Меньшим углам управления соответствует большая Е и, следовательно, более высокая скорость двигателя; при а = я/2 ЭДС У В Еа = 0 и двигатель работает в режиме динамического торможения. 26. Кратковременный номинальный режим (52) характеризуется чередованием периодов неизменной нагрузки с периодами отключения двигателя; при этом за время его работы / превышение температуры не достигает установившегося уровня, а за время отключения (паузы) !0 все части двигателя охлаждаются до температуры окружающей среды. Стандартные значения продолжительности рабочего периода составляют 10,30,60 и 90 минут. Для полного использования в кратковременном режиме работы двигателя, предназначенного для работы в продолжительном режиме, его следует перегружать по мощности на валу. В этом случае к концу рабочего периода его переев достигнет допустимого (норматив- и ного) уровня. Коэффициентом термической перегрузки |