шпора 1. Шпора 1. 1. Статические и динамические моменты. Механическая характеристика механизма. Уре движения
 Скачать 1.35 Mb. Скачать 1.35 Mb.
|

|
рт называется отношение потерь мощности при кратковременном режиме ∆Рк к номинальным потерям мощности ∆Рном 27.Для ЭП ряда подъемно-транспортных машин и механизмов с целью получения пониженных (посадочных) скоростей движения их исполнительных органов применяется так называемая схема с шунтированием якоря ДПТНВ (рис. 4.21). В этой схеме параллельно якорю двигателя включен шунтирующий резистор Кш, а последовательно - резистор Яп. 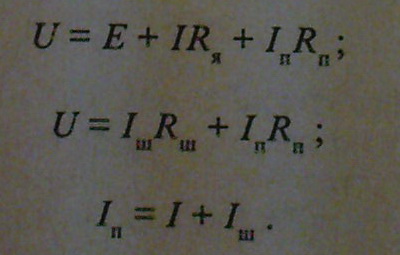 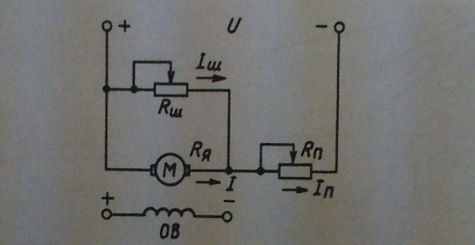 В схеме с шунтированием якоря снижается скорость идеального холостого хода и падает жесткость характеристик по сравнению с основной схемой включения двигателя. что и показывают искусственные характеристики ДПТНВ. Рассмотренный способ регулирования скорости имеет следующие показатели: диапазон регулирования скорости 5...6; плавность регулирования, определяемую плавностью изменения сопротивлений К и К ; регулирование осуществляется вниз от основной скорости при постоянном моменте нагрузки; жесткость получаемых искусственных характеристик относительно высокая в области малых скоростей. Экономичность этого способа невысока из-за значительных потерь мощности в цепи якоря, поэтому он используется для регулирования скорости двигателей небольшой мощности или при кратковременной работе ЭП на пониженных скоростях. 28. К аппаратам ручного управления относятся командные кг мощные устройства - кнопки и ключи управления, командоконтроллеры и силовые коммутационные аппараты (рубильники, пакетные выключатели и силовые контроллеры). Кнопки управления предназначены для подачи оператором управляющего воздействия на ЭП. Они различаются по размерам - нормальные и малогабаритные, числу замыкающих и размыкающих контактов, форме толкателя. Две, три или более кнопок, смонтированных в одном корпусе, образуют кнопочную станцию. Ключи управления (универсальные переключатели) предназначены для подачи управляющего воздействия на ЭП и имеют два или более фиксированных положений рукоятки и несколько замыкающих и размыкающих контактов (см. рис. 10.1,5). В среднем положении рукоятки (позиция 0) замкнут контакт 5М1, что обозначается точкой на схеме, а контакты 5М2 и 5МЗ разомкнуты. В положении У рукоятки замыкается контакт 5М2 и размыкается 8М1. Число контактов ключей и диаграмма их работы могут быть самыми различными. Командоконтролллеры (командо- аппара ты) служат для коммутации нескольких маломощных (ток нагрузки до 16 А) электрических цепей. Эти аппараты, имеющие ручное управление от рукоятки или педали с несколькими положениями, находят широкое применение в схемах управления ЭП крановых механизмов, металлургического оборудования, на транспорте. Рубильники - это простейшие силовые коммутационные аппараты, которые в основном предназначены для неавтоматического нечастого замыкания и размыкания силовых электрических цепей двигателей постоянного и переменного тока напряжением до 500 В и током до 5000 А. Они различаются по силе коммутируемого тока, числу полюсов (коммутируемых цепей), виду привода рукоятки и числу ее положений (два или три). Рубильники серий Р и РА рассчитаны на токи 100...600 А, напряжения 220...660 В и имеют 1 ...3 полюса. Пакетные выключатели - это разновидность рубильников. Их контактная система набирается из отдельных пакетов по числу полюсов (коммутируемых цепей). Пакет состоит из изолятора, в пазах которого находятся неподвижный контакт с винтовыми зажимами для подключения проводов и пружинный подвижный контакт с устройством искрогашения. Контроллеры - это многопозиционные электрические аппараты с ручным или ножным приводом для непосредственной коммутации силовых цепей двигателей постоянного и переменного тока. В ЭП используются контроллеры двух видов -- кулачковые и магнитные. Магнитные контроллеры представляют собой коммутационные устройства, в состав которых входят командоконтроллер и силовые электромагнитные аппараты - контакторы. Командоконтроллер с помощью своих контактов управляет катушками контакторов, которые в свою очередь осуществляют коммутацию силовых цепей двигателей. 29. К аппаратам дистанционного управления относятся контакторы, магнитные пускатели и реле, коммутация контактов которых осуществляется при подаче на их катушки электрического сигнала (напряжения или тока) и снятии этого сигнала. Другими словами, это двух- позиционные коммутационные аппараты с самовозвратом, включение и выключение которых осуществляется электрическим сигналом. Контактор представляет собой электромагнитный аппарат, предназначенный для частых дистанционных коммутаций силовых цепей двигателей. Контакторы различаются по роду тока коммутируемой цепи, числу главных контактов (одно-, двух- и многополюсные), роду тока цепи катушки (управление постоянным или переменным токами), номинальным току и напряжению коммутируемых цепей, конструктивному исполнению и другим признакам. Магнитный пускатель представляет собой специализированный комплексный аппарат, предназначенный главным образом для управления трехфазными асинхронными двигателями, т. е. для их подключения к сети, отключения, обеспечения тепловой защиты и сигнализации о режимах работы. В соответствии с функциями пускателя в него могут входить контактор, кнопки управления, тепловые реле защиты, сигнальные лампы, размещаемые в одном корпусе. Магнитные пускатели различаются по назначению (нереверсивные и реверсивные), наличию или отсутствию тепловых реле и кнопок управления, степени защиты от воздействия окружающей среды, уровням коммутируемых токов, рабочему напряжению главной цепи. Электромагнитное реле представляет собой аппарат, предназначенный для коммутации слаботочных цепей управления ЭП в соответствии с электрическим сигналом, подаваемым на его катушку. Область применения реле очень широкая. Они используются в качестве датчиков тока и напряжения, а также как промежуточные элементы для передачи команд из одной цепи в другую и размножения сигналов, как датчики времени, выходные элементы различных датчиков координат ЭП и датчики технологических параметров рабочих машин и механизмов. Другими словами, они выполняют самые разнообразные функции управления, контроля, защиты и блокировок в автоматизированном ЭП. 30. В ЭП электрического транспорта и ряда грузоподъемных машин и механизмов нашли широкое применение двигатели постоянного тока последовательного возбуждения (ДПТПВ), схема включения и кривая намагничивания которых показаны на рис. 4.30. Основной особенностью этих двигателей является включение обмотки возбуждения 2 последовательно с обмоткой якоря 1 и добавочным резистором Зу вследствие чего ток якоря одновременно является и током возбуждения. М В простейшем случае кривую намагничивания представляют прямой линией 4. Такая аппроксимация по существу означает пренебрежение насыщением магнитной системы двигателя и позволяет представить зависимость потока от тока следующим образом: Ф=aI Электромеханическая и механическая характеристики двигателя выражаются формулами: 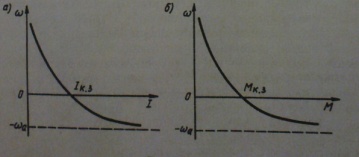 Особенность характеристик состоит в том, что при небольших токах и моцентах двигателя, соответствующих малым моментам нагрузки, его скорость принимает большие значения, при этом характеристики не пересекают ось скорости. Таким образом, для двигателя последовательного возбуждения, включенного по основной схеме (см. рис. 4.30), не существуют режимы холостого хода и генератора, работающего параллельно с сетью (или режима рекуперативного торможения), так как характеристики во втором квадранте не проходят. Это объясняется тем, что при 1,М 0 магнитный поток Ф —» 0, а следовательно, в соответствии с Е—» V. Другими словами, при любой скорости Е <11, в силу чего отдачи энергии в сеть происходить не может. Отметим, что из-за наличия в двигателе потока остаточного намагничивания Ф^ практически скорость холостого хода существует и равна в этом случае отношениюU/(кФост). 41. Схемы замкнутых структур электрического привода Замкнутые структуры электрического привода строятся по принципам компенсации возмущений и отклонений, называемых также принципом обратной связи. Рассмотрим принцип компенсации наиболее характерного внешнего возмущения электрического привода, момента нагрузки Мc, при регулировании скорости w. Основным признаком замкнутой структуры электрического привода является наличие цепи, по которой на вход электропривода вместе с задающим сигналом скорости Uз.с. подается сигнал Uм=kмMс, пропорциональный моменту нагрузки Мс. В результате этого управления электропривода осуществляется суммарным сигналом U∆, который автоматически изменяется в нужную сторону при колебаниях момента нагрузки, обеспечивая с помощью системы управления поддержание скорости электропривода на заданном уровне. Несмотря на свою эффективность, электрический привод по этой схеме (Рис.40) выполняется редко из-за отсутствия простых и надежных датчиков момента нагрузки Мс (возмущающего воздействия). 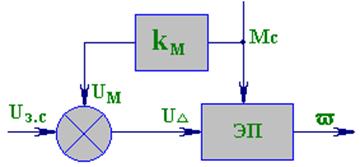  В связи с таким положением подавляющее большинство замкнутых структур электропривода строятся по принципу отклонения (обратной связи). Он характеризуется наличием цепи обратной связи, соединяющей выход электропривода с его входом, откуда и пошло название замкнутых схем. Применительно к рассматриваемому примеру регулирования скорости признаком этой структуры является цепь обратной связи (Рис.41), по которой информация о текущем значении скорости (сигнал обратной связи Uо.с=ko.c.w) подается на вход электропривода, где он вычитается из сигнала задания скорости Uз.с.. Управление электроприводом осуществляется сигналом отклонения UD=Uзс – Uос ( его также называют сигналом рассоглосования или ошибки). Этот сигнал при отличии скорости от заданного уровня автоматически изменяется необходимым образом и устраняет с помощью системы управления электропривода эти отклонения. Тем самым управление движением осуществляется с учетом его результата. В связи с таким положением подавляющее большинство замкнутых структур электропривода строятся по принципу отклонения (обратной связи). Он характеризуется наличием цепи обратной связи, соединяющей выход электропривода с его входом, откуда и пошло название замкнутых схем. Применительно к рассматриваемому примеру регулирования скорости признаком этой структуры является цепь обратной связи (Рис.41), по которой информация о текущем значении скорости (сигнал обратной связи Uо.с=ko.c.w) подается на вход электропривода, где он вычитается из сигнала задания скорости Uз.с.. Управление электроприводом осуществляется сигналом отклонения UD=Uзс – Uос ( его также называют сигналом рассоглосования или ошибки). Этот сигнал при отличии скорости от заданного уровня автоматически изменяется необходимым образом и устраняет с помощью системы управления электропривода эти отклонения. Тем самым управление движением осуществляется с учетом его результата.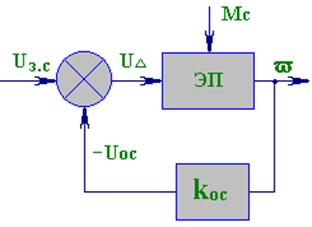 Все виды применяемых в замкнутом электроприводе обратных связей делятся на положительные и отрицательные, линейные и нелинейные, жесткие и гибкие. Все виды применяемых в замкнутом электроприводе обратных связей делятся на положительные и отрицательные, линейные и нелинейные, жесткие и гибкие.Положительной называется такая обратная связь, сигнал которой направлен согласно (складывается) с задающим сигналом, в то время как сигнал отрицательной связи направлен ему встречно. Жесткая обратная связь характеризуется тем, что она действует как в установившемся, так и в переходном режимах электропривода. Сигнал гибкой обратной связи вырабатывается только в переходных режимах электропривода и служит для обеспечения требуемого их качества, например устойчивости движения, допустимого перерегулирования. Линейная обратная связь характеризуется пропорциональной зависимостью между регулируемой координатой и сигналом обратной связи Uо.с., в то время как при реализации нелинейной связи эта зависимость нелинейная. В зависимости от вида регулируемой координаты в электроприводе используются все названные выше связи по скорости, положению, току, напряжению, магнитному потоку, ЭДС. Для обеспечения заданного хода и качества технологических процессов на электроприводе кроме указанных «внутренних» обратных связей часто подаются сигналы технологических датчиков, например температуры, давления, расхода и т.д. В этом случае электропривод вместе с рабочей машиной или механизмом, реализующим технологический процесс или операцию, образуют систему автоматического регулирования. 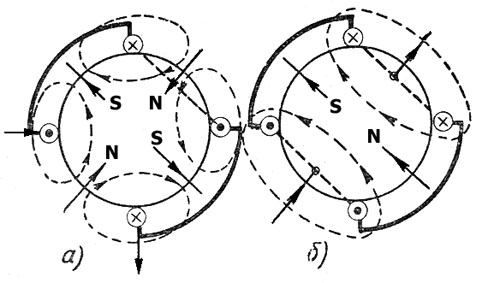 4 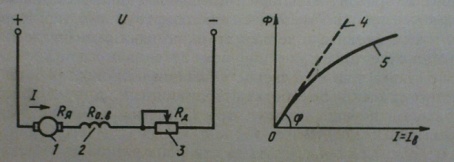 2. Электропривод с программным управлением Электрический привод с программным управлением обеспечивает движение исполнительного органа рабочей машины по определенной, наперед заданной программе. 2. Электропривод с программным управлением Электрический привод с программным управлением обеспечивает движение исполнительного органа рабочей машины по определенной, наперед заданной программе. От программного устройства ПУ (рис.39) сигнал управления Uп поступает на электропривод, который обеспечивает отработку этого сигнала управления, перемещая соответствующим образом исполнительный орган ИО. Совокупность программного устройства ПУ и электропривода ЭП называют системой программного управления СПУ. Вся совокупность существующих программных устройств делится на числовые и нечисловые (цикловые) программные устройства. Электрический привод с числовым программным управлением. Такой электропривод представляет собой универсальную систему программного управления. Эта система обеспечивает существенное повышение производительности труда и качества обработки деталей. При использовании электрического привода с частотным программным управлением все технологические данные по обработке изделий — скорости и перемещения изделий или обрабатывающего инструмента, их направления, последовательность операций при обработке и т.д. — задаются в виде чисел. Совокупность всех чисел образует программу обработки данного изделия, которая предварительно соответствующим образом рассчитывается, кодируется, записывается на тот или иной программоноситель. Перед обработкой изделия программа вводится в программное устройство электропривода, который в дальнейшем обеспечивает обработку изделия без непосредственного участия рабочего. Для обработки другого изделия требуется лишь изменить программу, что значительно сокращает время обработки за счет исключения вспомогательных операций. Таким образом, система программного управления с числовым программным управлением представляет собой разновидность цифрового электропривода с программным управлением. Системы числового программного управления делятся на аналоговые (непрерывные) и дискретные (импульсные). В аналоговых системах числового программного управления совокупность чисел, образующих программу обработки изделия, преобразуется в какую-либо непрерывно изменяющуюся аналоговую физическую величину (напряжение постоянного тока, фазу или амплитуду синусоидального напряжения), которая и является входным управляющим воздействием на электропривод. В дискретных системах числового программного управления программа в конечном итоге представляется последовательностью управляющих импульсов, каждому из которых соответствует определенное перемещение инструмента или изделия. Число импульсов определяет значение перемещения, а их частота –– скорость перемещения. Системы числового программного управления работают в одном из двух режимов: режиме позиционирования или режиме контурной обработки. Позиционные (координатные) системы числового программного управления обеспечивают точную установку инструмента относительно изделия или их прямолинейное перемещение. Инструмент или изделие при этом перемещаются по кратчайшим, прямолинейным путям между точками установки (позициями) инструмента. Контурные (функциональные) системы числового программного управления обеспечивают перемещение инструмента или изделия по произвольным траекториям, что требуется при контурной обработке изделий различной конфигурации. Системы числового программного управления могут быть замкнутыми или разомкнутыми. В замкнутых системах с помощью датчиков измеряется действительное положение инструмента или изделия и эта информация в виде сигнала обратной связи подается в сравнивающее устройство, в котором она сопоставляется с сигналами программного устройства. При отличии действительного положения от заданного в систему управления электропривода поступают дополнительные управляющие сигналы, обеспечивающие необходимую коррекцию положения инструмента или изделия. Тем самым замкнутые системы числового программного управления обеспечивают большую точность обработки изделий. В разомкнутых системах числового программного управления движение инструмента или изделия не контролируется и не сопоставляется с заданными. Поэтому случайное изменение параметров системы или каких либо возмущений вызывает снижение точности отработки программы. Вместе с тем разомкнутые системы оказываются проще замкнутых в наладке и эксплуатации. Электрический привод с нечисловыми (цикловыми) программными устройствами. Эти приводы используются для обеспечения повторяющихся одинаковых циклов движения исполнительных органов. Программные устройства таких электроприводов выполняются с применением различных контактных и бесконтактных аппаратов релейного действия — конечных и путевых выключателей, шаговых искателей, счетчиков, средств программируемой логики. К электроприводам с нечисловыми программными устройствами относятся также системы с использованием шаблонов и копиров, которые нашли применение в различных копировальных станках и автоматах. В таких системах обычно используется следящий электрический привод релейного действия. В последнее время широкое применение в системах программного управления электроприводами находят программируемые контроллеры, представляющие собой специализированные ЭВМ для автоматизации цикловых и последовательных производственных и технологических процессов. Они позволяют реализовывать как простые схемы управления цикловым движением электроприводов, так и сложные системы комплексной автоматизации промышленного оборудования. Их применение оказывается экономически целесообразным при реализации схем управления, требующих использования нескольких десятков или сотен обычных электрических аппаратов — реле, логических элементов, счетчиков и т.д. 43. Схема включения, статические характеристики и режимы работы АД 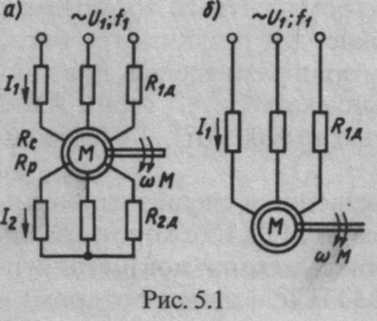 Электромеханическая характеристика I2'(s) АД описывается выражением, получаемым непосредственно из анализа рис. 5.2: I’2=Uф/  , (5.3) , (5.3)г 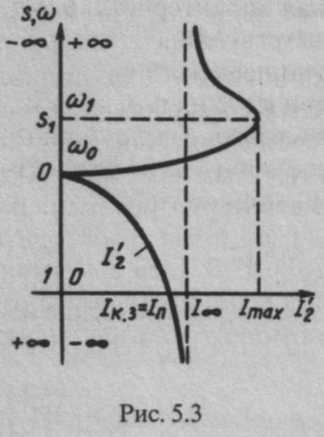 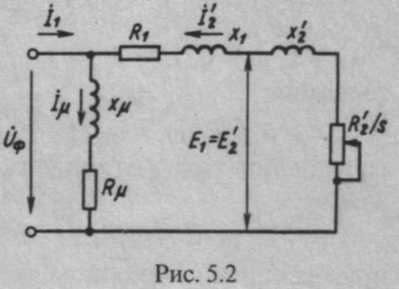 де хк = х, + х'2 - индуктивное фазное сопротивление короткого замыкания. Для построения электромеханической характеристики АД проанализируем характерные точки этой зависимости и ее асимптоты, придавая скольжению s и скорости со различные значения в пределах ±°°: де хк = х, + х'2 - индуктивное фазное сопротивление короткого замыкания. Для построения электромеханической характеристики АД проанализируем характерные точки этой зависимости и ее асимптоты, придавая скольжению s и скорости со различные значения в пределах ±°°:Механическая характеристика  (5.5) (5.5)Характерные точки механической характеристики следующие: s = 0,  = 0, М = 0 - точка идеального холостого хода; = 0, М = 0 - точка идеального холостого хода; s = 1, = 0, М - Мкз = Мп - точка короткого замыкания;s = sкд , M — Mкд ; s = - sкг , M = - Mкг - критические точкисоответственно в двигательном и генераторном режимах; s —» ±°°, —> ±°°, М —> 0 - асимптота механической характеристики, которой является ось скорости.АД может работать во всех возможных энергетических режимах, которые определяются значением и знаком скольжения, а именно: s = 0, = 0 - режим идеального холостого хода;s = 1, = 0 - режим короткого замыкания;О < s < 1, 0<с < 0- двигательный режим;s < 0, > 0 - генераторный режим при работе АД параллельно с сетью (рекуперативное торможение);s > 1, < 0 - генераторный режим при работе АД последовательно с сетью (торможение противовключением).44. Изменение числа полюсов электродвигателя. Для возможности изменения числа пар полюсов электродвигателя статор его выполняют либо с двумя самостоятельными трехфазными обмотками, либо с одной трехфазной обмоткой, которую можно пересоединять на различные числа полюсов. На рисунке схематически показаны две катушки одной фазы, соединенные последовательно. Катушки создают четыре магнитных полюса. Те же катушки, соединенные параллельно между собой, создадут только два полюса (рис. б). Пересоединение обмоток статора производится при помощи специального аппарата – контроллера. При этом способе регулировка скорости вращения двигателя совершается скачками. На практике встречаются двигатели, синхронные скорости вращения no которых могут быть равны 3000, 1500, 1000 и 750 оборотов в минуту. Регулировку скорости вращения двигателя путем изменения числа полюсов можно производить только у асинхронных двигателей с короткозамкнутым ротором. Ротор с короткозамкнутой обмоткой может работать при разных числах полюсов магнитного поля. Наоборот, ротор двигателя с фазной обмоткой может работать нормально лишь при определенном числе полюсов поля статора. Иначе обмотку ротора также пришлось бы переключать, что внесло бы большие усложнения в схему двигателя. 45. Дискретные элементы характеризуются частотой циклов преобразования, погрешностями преобразования и временем преобразования, затрачиваемым на один цикл. Дискретные элементы с амплитудной модуляцией в свою очередь подразделяются на две группы: системы с амплитудной модуляцией первого рода и системы с амплитудной модуляцией второго рода. Дискретные элементы, квантующие сигнал по времени, превращают Непрерывный входной сигнал в последовательность импульсов, составляющих выходной сигнал. Параметрами импульсов являются высота, ширина, положения внутри интервала квантования по времени. Дискретные элементы вносятся в схему следящей системы в основном тогда, когда это дает возможность упростить конструкцию и повысить точность и надежность системы. Дискретные элементы обеспечивают более высокую точность передачи и преобразования информации. Схема установки пистонов н контактов для контроля печатной платы. Дискретные элементы крепятся на плате, главным образом, с помощью панки. При необходимости дополнительного крепления должны быть предусмотрены крепежные детали. Детали крепления должны обеспечивать необходимый зазор ( 1 мм) между элементами крепления и платой. Выводы элементов в этом случае формуются без изгиба. Дискретные элементы, действие которых основано на использовании отрыва потока от стенки. Исходными для создания модели процесса подобных элементов являются представления о пограничном слое в потоке, обтекающем аэродинамический профиль, и об эффекте отрыва потока от стенки при определенных условиях течения в пристеночной области. Предполагается, что в этих элементах при отсутствии управляющего сигнала реализуется безотрывное обтекание аэродинамического профиля потоком питания. При подаче через канал, выполненный в этом профиле, управляющего сигнала в пограничном слое искусственно создаются условия, благоприятствующие отрыву струи от профиля. Под действием управляющего потока точка отрыва пограничного слоя перемещается вверх по течению. Дискретные элементы должны быть сравнимы по размерам с тонкопленочными элементами, поэтому в гибридных схемах применяют микротранзисторы и микродиоды. Размеры их либо сокращены до минимума, либо эти элементы используют без корпуса. Оптические дискретные элементы по виду их применения можно разделить на две основные группы: несвязанные и связанные. Внешний вид конструкций некоторых микросхем. Сейчас дискретные элементы все больше уступают свое место в радиотехнике и электронике, микросхемам - миниатюрным электронным блокам функционального назначения. Один такой блок, объединяющий в миниатюрном корпусе транзисторы, диоды, резисторы, может выполнять функции целого тракта радиовещательного приемника, усилителя 34, генератора, преобразователя частоты, электронного автомата. Какие различаются дискретные элементы сравнения фаз, функционирующие по логическим алгоритмам. В книге рассмотрены дискретные элементы, применяемые в пневматических системах управления. Даны конкретные примеры элементов, образующих разработанную в ГДР систему Дрелоба. В данной книге рассматриваются дискретные элементы, образующие систему Дрелоба, которая разработана и выпускается в ГДР и по своему объему является самой полной дискретной системой из всех известных в настоящее время. Аналоговые решающие блоки и дискретные элементы комплекса с целью программного управления их работой снабжаются вспомогательными логическими субблоками. Последние построены с учетом результатов анализа алгоритмов переработки информации. В данной главе рассматриваются только простые дискретные элементы. Функциональные схемы элементов сравнения сигналов непрерывного ( а, в и релейного ( в действия. Несколько обособленную разновидность представляют собой логические дискретные элементы сравнения фаз с потенциальным или импульсным выходным сигналом ( см. § 12.8), являющиеся элементами дискретного действия. Несколько обособленную разновидность представляют собой логические дискретные элементы сравнения фаз с потенциальным или импульсным выходным сигналом ( см. § 9.7), являющиеся элементами дискретного действия. К этой же группе относятся дискретные элементы, основанные на отрыве потока от профильной стенки. Схемы транзисторных логических элиметов, реализующие функции. Кроме приведенных логических функций, логические дискретные элементы могут осуществлять также задержку и запоминание информации. 46. Регулирование частоты вращения асинхронного двигателя изменением частоты питающего напряжения Так как частота вращения магнитного поля статора nо = 60f/р, то регулирование частоты вращения асинхронного двигателя можно производить изменением частоты питающего напряжения. Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость nо магнитного поля статора. Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью. Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте. Схема частотного электропривода приведена на рис. 5, а механические характеристики АД при частотном регулировании — на рис. 6. Рис 5. Схема частотного электропривода. Рис 6. Механические характеристики асинхронного двигателя при частотном регулировании С уменьшением частоты f критический момент несколько уменьшается в области малых частот вращения. Это объясняется возрастанием влияния активного сопротивления обмотки статора при одновременном снижении частоты и напряжения. Частотное регулирование скорости асинхронного двигателя позволяет изменять частоту вращения в диапазоне (20 - 30) : 1. Частотный способ является наиболее перспективным для регулирования асинхронного двигателя с короткозамкнутым ротором. Потери мощности при таком регулировании невелики, поскольку минимальны потери скольжения. Большинство современных преобразователей частоты построено по схеме двойного преобразования. Они состоят из следующих основных частей: звена постоянного тока (неуправляемого выпрямителя), силового импульсного инвертора и системы управления. Звено постоянного тока состоит из неуправляемого выпрямителя и фильтра. Переменное напряжение питающей сети преобразуется в нем в напряжение постоянного тока. Силовой трехфазный импульсный инвертор содержит шесть транзисторных ключей. Каждая обмотка электродвигателя подключается через соответствующий ключ к положительному и отрицательному выводам выпрямителя. Инвертор осуществляет преобразование выпрямленного напряжения в трехфазное переменное напряжение нужной частоты и амплитуды, которое прикладывается к обмоткам статора электродвигателя. В выходных каскадах инвертора в качестве ключей используются силовые IGBT-транзисторы. По сравнению с тиристорами они имеют более высокую частоту переключения, что позволяет вырабатывать выходной сигнал синусоидальной формы с минимальными искажениями. Регулирование выходной частоты Iвых и выходного напряжения осуществляется за счет высокочастотной широтно-импульсной модуляции. 47.Аналоговые элементы и устройства управления ЭП Работу таких элементов и устройств рассмотрим на примере систем УБСР. Операционный усилитель (ОУ) является основным элементом аналоговой системы. Он представляет собой усилитель постоянного тока с очень большим коэффициентом усиления (до 10 000), охваченный отрицательной обратной связью. При включении во входные цепи и цепи обратных связей наряду с резисторами конденсаторов ОУ могут осуществлять и другие весьма разнообразные преобразования входных сигналов, необходимые для получения требуемых управляющих воздействий |