шпора 1. Шпора 1. 1. Статические и динамические моменты. Механическая характеристика механизма. Уре движения
 Скачать 1.35 Mb. Скачать 1.35 Mb.
|

еЭП. Такие схемы получили название регуляторов. В табл. 11.1 приведены некоторые распространенные схемы регуляторов с использованием ОУ.Р 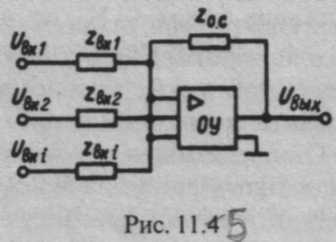 егуляторы получили свои названия в зависимости от выполня емых ими функциональных преобразований входных сигналов. егуляторы получили свои названия в зависимости от выполня емых ими функциональных преобразований входных сигналов.Пропорциональный (П) регулятор осуществляет рассмотренное выше масштабное (пропорциональное) преобразование входного сигнала с коэффициентом к = R0J Rt и инвертированием его знака. Интегральный (И) регулятор. Для реализации этого регулятора в цепь обратной связи ОУ включается конденсатор Со , а во входную цепь - резистор Rv В результате регулятор приобретает свойства интегрирующего устройства и напряжение на его выходе определяется интегралом от входного сигнала. Дифференциальный (Д) регулятор. Схема соединения этого регулятора обеспечивает дифференцирование входного сигнала с коэффициентом Т = R0CC{.). Апериодический (А) регулятор. Переходной функцией такого регулятора является экспоненциальная зависимость выходного сигнала во времени. Функциональные преобразователи входят в состав УБСР-АИ и позволяют возводить в квадрат и извлекать квадратный корень из входного сигнала (ячейка ПК-1АИ), умножать и делить входные аналоговые сигналы (ячейки УМ-1АИ, УМ-2АИ, МДУ-1АИ), выделять модуль сигнала (ячейка ВМ-1АИ), осуществлять различные нелинейные зависимости между входным и выходным сигналами (ячейка ПФ-1АИ). Командные (задающие) устройства реализуются на базе сельсин-ного командоаппарата типа СКА. Они выпускаются в трех исполнениях - с приводом от рукоятки (СКАР), педальным приводом (СКАП) и маховичковым приводом (СКАЗ). Датчики координат электрических приводов. В замкнутых ЭП, как уже говорилось, для формирования требуемых статических и динамических характеристик применяются обратные связи по скорости, положению, току и напряжению, реализуемые с помощью соответствующих датчиков. Датчики напряжения для ЭП с ДПТ выполняются на основе потенциометра, включаемого на зажимы якоря М двигателя, как это показано на рис. 11.10, а. Уровень сигнала обратной связи по напряжению Uo н, снимаемого с потенциометра RP, а значит, и коэффициент обратной связи по напряжению определяются положением движка потенциометра. Датчики положения применяются для получения электрического сигнала, пропорционального положению исполнительного органа или вала двигателя. В таких датчиках используются сельсины, потенциометры и вращающиеся трансформаторы. 48. Регулирование координат АД с помощью резисторов Данный способ регулирования координат, называемый часто реостатным, осуществлятся введением добавочных активных резисторов в статорные или роторные цепи АД (см. рис. 5.1). Он привлекателен простотой своей реализации, но имеет в то же время невысокие показатели качества регулирования и экономичности. В 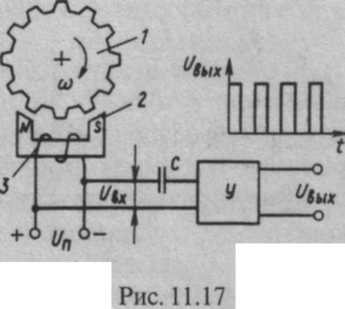 ключение добавочных резисторов в цепь статора применяется главным образом для регулирования (ограничения) в переходных процессах тока и момента АД с короткозамкнутым ротором. все искусственные электромеханические характеристики располагаются в первом квадранте ниже и левее естественной. С учетом того, что скорость идеального холостого хода ю0 при включении R]a не изменяется, получаемые искусственные электромеханические характеристики можно представить семейством кривых 2... 4, которые расположены ниже естественной характеристики 1, построенной при Л1д = 0, причем большему значению Rla соответствует больший наклон искусственных характеристик (рис. 5.6, а). Практическая ценность этих характеристик состоит в обеспечении возможности ограничения токов АД при пуске. ключение добавочных резисторов в цепь статора применяется главным образом для регулирования (ограничения) в переходных процессах тока и момента АД с короткозамкнутым ротором. все искусственные электромеханические характеристики располагаются в первом квадранте ниже и левее естественной. С учетом того, что скорость идеального холостого хода ю0 при включении R]a не изменяется, получаемые искусственные электромеханические характеристики можно представить семейством кривых 2... 4, которые расположены ниже естественной характеристики 1, построенной при Л1д = 0, причем большему значению Rla соответствует больший наклон искусственных характеристик (рис. 5.6, а). Практическая ценность этих характеристик состоит в обеспечении возможности ограничения токов АД при пуске.Д 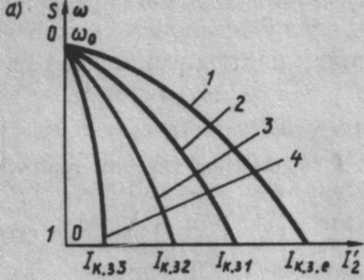 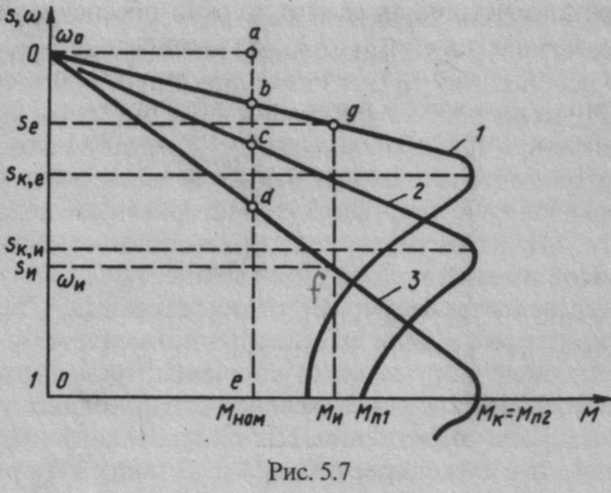 ля получения искусственных механических характеристик проанализируем влияние Ru на координаты их характерных точек. ля получения искусственных механических характеристик проанализируем влияние Ru на координаты их характерных точек. Скорость холостого хода со0= Infjp не изменяется при Rla = var, т.е. все искусственные характеристики проходят через эту точку на оси скорости (скольжения). Включение добавочных резисторов R2д в цепь ротора применяется как с целью регулирования тока и момента АД с фазным ротором, так и для регулирования его скорости. Искусственные электромеханические характеристики при - var имеют вид, показанный на рис. 5.6, а, и могут использоваться для регулирования (ограничения) пускового тока. 49. Датчики скорости и положения, применяющиеся в замкнуты схемах управления. Для получения информации о скорости и положении вала двигателя в замкнутых ЭП применяются аналоговые и дискретные датчики скорости и положения. 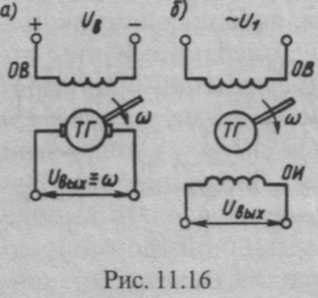 Датчики скорости (тахогенераторы) предназначены для измерени скорости вращения вала двигателя или исполнительного органа рабочей машины. Они представляют собой специализированные электрические машины небольшой мощности, выходное напряжение кс -торых пропорционально скорости вращения их якоря (ротора), т. е £/вых - уы, где у - коэффициент пропорциональности. Основное тре-бование к тахогенераторам заключается в максимальном приближении зависимости U(м) к линейной, чт: вых 4 ' 7 определяет точность их работы. По принципу своего действия и устройству тахогенераторы бывают пост янного и переменного тока. Т 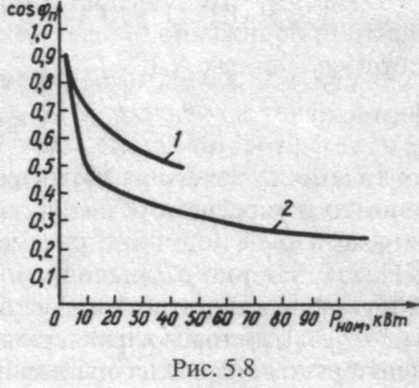 ахогенераторы постоянного ток. представляют собой небольшие генератс -ры постоянного тока с возбуждением с независимого источника (рис. 11.16, а) иг. от постоянного магнита (см. рис. 10.7. Б) Тахогенераторы переменного тока в основном применяются асинхронного типа и по своему устройству мало отличаются от однофазных асинхронных двигателей. Они имеют две обмотки (см. рис. 11.16,5), одна из которых ОВ подключается к питающей сети и служит для возбуждения тахогенератора, а другая ОИ является измерительной. Напряжение на зажимах этой обмотки Uпропорционально скорости вращения тахогенератора ш. ахогенераторы постоянного ток. представляют собой небольшие генератс -ры постоянного тока с возбуждением с независимого источника (рис. 11.16, а) иг. от постоянного магнита (см. рис. 10.7. Б) Тахогенераторы переменного тока в основном применяются асинхронного типа и по своему устройству мало отличаются от однофазных асинхронных двигателей. Они имеют две обмотки (см. рис. 11.16,5), одна из которых ОВ подключается к питающей сети и служит для возбуждения тахогенератора, а другая ОИ является измерительной. Напряжение на зажимах этой обмотки Uпропорционально скорости вращения тахогенератора ш.Синхронные тахогенераторы представляют собой однофазный синхронный генератор малой мощности с ротором в виде многополюсного постоянного магнита. При вращении ротора создаваемое им магнитное поле пересекает витки обмотки статора и наводит в ней ЭДС, пропорциональную скорости вращения, поэтому выходное напряжение на зажимах обмотки статора оказывается пропорциональным скорости ротора. Особенностью синхронных тахогенераторов является зависимость частоты их выходного напряжения от скорости ротора. И 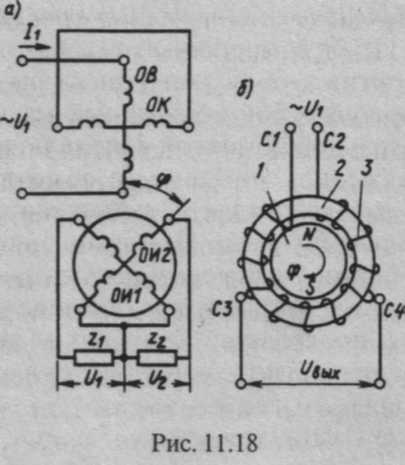 мпульсный индукционный датчик скорости включает в себя зубчатый диск 1 (рис. 11.17), соединенный с валом двигателя или рабочей машины. Напротив зубцов этого диска располагается индуктор 2, представляющий собой постоянный магнит с расположенной на нем измерительной обмоткой 3, подключенной к источнику питания Un. Напряжение, снимаемое с обмотки, подается через конденсатор С на вход усилителя У, выполняющего одновременно роль формирователя импульсов. При вращении диска изменяется зазор между его зубцами и полюсами индуктора 2. Вследствие этого резко изменяются магнитное сопротивление воздушного зазора и магнитный поток, проходящий через зубцы диска 7 и индуктор. Изменяющийся магнитный поток индуцирует в обмотке 3 ЭДС, частота которой / = G)jV/(27i), где N - число зубцов диска; со - скорость диска (вала двигателя). мпульсный индукционный датчик скорости включает в себя зубчатый диск 1 (рис. 11.17), соединенный с валом двигателя или рабочей машины. Напротив зубцов этого диска располагается индуктор 2, представляющий собой постоянный магнит с расположенной на нем измерительной обмоткой 3, подключенной к источнику питания Un. Напряжение, снимаемое с обмотки, подается через конденсатор С на вход усилителя У, выполняющего одновременно роль формирователя импульсов. При вращении диска изменяется зазор между его зубцами и полюсами индуктора 2. Вследствие этого резко изменяются магнитное сопротивление воздушного зазора и магнитный поток, проходящий через зубцы диска 7 и индуктор. Изменяющийся магнитный поток индуцирует в обмотке 3 ЭДС, частота которой / = G)jV/(27i), где N - число зубцов диска; со - скорость диска (вала двигателя).Созданное этой ЭДС напряжение переменного тока Umчерез конденсатор С подается на вход усилителя, который, усиливая этот сигнал, формирует из него последовательность выходных прямоугольных импульсов, частота которых пропорциональна измеряемой скорости. Далее эти импульсы при помощи цифрового блока «частота - код», имеющегося, например, в УБСР-ДИ, преобразуются в двоичное число посредством их подсчета за определенный интервал времени с запоминанием полученного числа на время последующего интервала. При необходимости этот переменный по частоте сигнал можно преобразовать и в напряжение постоянного тока (например, с помощью интегрирующего операционного усилителя) для использования в аналоговых схемах управления ЭП. Датчики положения применяются в замкнутых схемах управления ЭП и выполняются аналоговыми или цифровыми. Вращающиеся (поворотные) трансформаторы, являющиеся аналоговыми датчиками положения (угла поворота) вала двигателя или рабочей машины, представляют собой индукционную электрическую машину малой мощности. Их работу рассмотрим на примере наиболее распространенного синусно-косинусного вращающегося трансформатора (СКВТ). Этот трансформатор (рис. 11.18, а) имеет четыре обмотки, две из которых (возбуждения ОВ и компенсационная О К) расположены на статоре и две (измерительные ОИ1 и ОИ2), называемые вторичными, - на роторе. Ротор соединяется с валом двигателя или рабочей 50. Расчет резисторов в цепи статора. Рассмотрим наиболее распространенную задачу, когда включение добавочного резистора во все три фазы статора (симметричная схема) должно обеспечить заданную кратность пускового тока  или момента или момента  где I1п.и ,I1пе и Мпи,Мпе-соответственно пусковые токи и моменты АДпри включении добавочного резистора и без него. где I1п.и ,I1пе и Мпи,Мпе-соответственно пусковые токи и моменты АДпри включении добавочного резистора и без него.Воспользуемся для расчета методикой, приведенной в [3], для чего введем понятия полного комплексного сопротивления короткого замыкания z,соответствующего моменту пуска АД:  (5.17) (5.17)а также активного г%и реактивного хксопротивлений короткого замыкания, определяемых по формулам  (5.18) (5.18) (519) (519)где cos фп - коэффициент мощности АД в момент его пуска. Тогда для получения заданных кратностей пусковых тока а или момента п. требуемое сопротивление добавочного резистора определим по формулам  (5.20) (5.20) (5/21) (5/21)Основная трудность при использовании формул (5.18) ... (5.21) состоит в определении cos фп = cos фкз, значение которого обычно не приводится в справочниках и каталогах. На рис. 5.8 приведены усредненные зависимости коэффициента мощности асинхронных двигателей от их номинальной мощности в режиме короткого замыкания (пуска), рассчитанные по паспортным данным двигателей серий 4А (кривая 2), и МТК (кривая 1)для различных скоростей вращения. Приближенно для серии двигателей 4А с ко-роткозамкнутым ротором можно принять cos фп = 0,3...0,5, а для АД серий MTF и МТН cos фп = 0,6... 0,7. В [3] приведен также метод расчета добавочного резистора, включаемого в одну фазу статора (несимметричная схема), с целью получения заданных пусковых тока и моме 51. Следящий электропривод. Следящий электропривод, следящая система, обеспечивающая воспроизведение некоторых механических перемещений на управляемом объекте посредством исполнительного электродвигателя (ИЭ). Следящий электропривод включает в себя задающее устройство, измерительный преобразователь, орган сравнения, усилитель и ИЭ. Задающее устройство вырабатывает исходный сигнал (изменяющийся, как правило, по произвольному закону). Измерительный преобразователь непрерывно измеряет фактическое значение воспроизводимой величины на управляемом объекте, которое при помощи органа сравнения сопоставляется с заданным. Обычно измерительный преобразователь и орган сравнения объединены в одном устройстве, вырабатывающем электрический сигнал рассогласования (СР), пропорциональный разности между заданным и фактическими значениями воспроизводимой величины. СР (в виде напряжения или тока) поступает на вход усилителя, а затем на ИЭ, осуществляющий такое движение управляемого объекта, при котором СР уменьшается. В отсутствие СР ротор электродвигателя находится в покое. Различают Следящий электропривод с непрерывным и дискретным управлением. Особенностью первого является непрерывное регулирование напряжения (мощности) ИЭ в функции СР. В простейшем случае эта зависимость линейна. Следящий электропривод с дискретным управлением подразделяются на релейные и импульсные. В релейных Следящий электропривод в качестве усилителя используют бесконтактные реле, которые при определённой величине СР включают ИЭ на полную мощность. В импульсных Следящий электропривод включение ИЭ осуществляется периодически, через определённые (равные) промежутки времени управляющими импульсами тока, амплитуда, длительность или частота которых являются функцией СР. В большинстве Следящий электропривод задаваемой величиной является угол поворота входного вала, а регулируемой — угол поворота выходного вала, с которым связан управляемый объект. В качестве измерительных преобразователей наибольшее распространение в таких устройствах получили потенциометры и индукционные машины переменного тока типа сельсинов или поворотных трансформаторов. Следящий электропривод находят применение в различных системах управления, передачи информации и измерения. 52.Расчет регулировочных резисторов в цепи ротора асинхронного двигателя. Обычно требуется определить сопротивление дополнительного резистора Я2д, при включении которого АД будет иметь заданную искусственную характеристику или же она будет проходить через заданную точку с координатами(  ). При этом предполагается, что естественная механическая характеристика АД известна (рассчитана или снята экспериментально), а требуемая искусственная характеристика задана по условиям пуска или регулирования скорости. ). При этом предполагается, что естественная механическая характеристика АД известна (рассчитана или снята экспериментально), а требуемая искусственная характеристика задана по условиям пуска или регулирования скорости.Расчет сопротивления добавочного резистора R2д может быть выполнен несколькими способами в зависимости от формы задания требуемой искусственной механической характеристики. Если искусственная характеристика задана полностью и определена точка критического момента (например, характеристика 2 на рис. 5.7), то в этом случае расчет основывается на формуле (5.10), с помощью которой находится отношение критических скольжений АД на естественной 1 и искусственной 2 характеристиках: Sк.е/Sк.и=Rр'/(Rр'+ R2д1') = Rр/(Rр + R2д1), (5.22) где Rp - сопротивление фазы обмотки ротора АД. Из (5.22) определим искомое значение R2д1=Rр(sк.и /sк.е -1). (5.23) Формула (5.23) справедлива не только для критического момента Мк , но и для любого фиксированного момента Ми. Таким образом, если задана некоторая точка  искусственной характеристики 3 (см. рис. 5.7) с координатами Ми , sи , то искомое сопротивление резистора можно найти по формуле искусственной характеристики 3 (см. рис. 5.7) с координатами Ми , sи , то искомое сопротивление резистора можно найти по формулеR2д2=Rр(sи /sе -1). (5-24) где sе - скольжение АД на естественной характеристике 1, соответствующее моменту Ми . Отметим, что значение сопротивления обмотки ротора можно найти приближенно по следующей формуле с использованием паспортных данных АД: Rр=E2ksном / (корень из 3*I2ном) (5.25) Если искусственная характеристика задана своей рабочей частью, то для расчета резисторов можно использовать метод отрезков, который подробно рассматривался в гл. 4 применительно i ДПТНВ. На рис. 5.7 выполнено такое построение, для чего проведена вертикальная линия, соответствующая номинальному моменту М , и отмечены характерные точки а, Ь, с, d, е. Тогда сопротиБ ление искомого резистора для получения характеристики 2 R2д1=Rномbc/ae (5-26) где Rном=E2k/( корень из 3*I2ном )- номинальное сопротивление АД; Е2k - ЭДС ротора при s=l; I2ном- номинальный ток ротора. С помощью метода отрезков и рис. 5.7 при необходимости по естественной характеристике 1 можно найти и сопротивление фазы обмотки ротора Rр =R2номab/ae (5.27) 53-Регулирование скорости ад изменением напряжения. Регулирование частоты вращения асинхронного двигателя изменением напряжения на статоре Изменение напряжения, подводимого к обмотке статора асинхронного двигателя, позволяет регулировать скорость с помощью относительно простых технических средств и схем управления. Для этого между сетью переменного тока со стандартным напряжением U1ном и статором электродвигателя включается регулятор напряжения. При регулировании частоты вращения асинхронного двигателя изменением напряжения, подводимого к обмотке статора, критический момент Мкр асинхронного двигателя изменяется пропорционально квадрату подводимого к двигателю напряжения Uрет (рис. 3), а скольжение от Uрег не зависит. Рис. 1. Механические характеристики асинхронного двигателя с фазным ротором при различных сопротивлениях резисторов, включенных в цепь ротора Рис. 2. Схема регулирования скорости асинхронного двигателя путем изменения напряжения на статоре 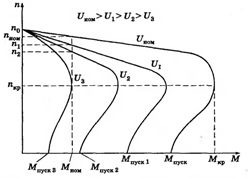 Рис. 3. Механические характеристики асинхронного двигателя при изменении напряжения подводимого к обмоткам статора Если момент сопротивления рабочей машины больше пускового момента электродвигателя (Мс > Мпуск), то двигатель не будет вращаться, поэтому необходимо запустить его при номинальном напряжении 17ном или на холостом ходу. Регулировать частоту вращения короткозамкнутых асинхронных двигателей таким способом можно только при вентиляторном характере нагрузки. Кроме того, должны использоваться специальные электродвигатели с повышенным скольжением. Диапазон регулирования небольшой, до nкр. Для изменения напряжения применяют трехфазные автотрансформаторы и тиристорные регуляторы напряжения. Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость nо магнитного поля статора. Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью. Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки Мс. При постоянном моменте нагрузки напряжение на статоре должно регулироваться пропорционально частоте. 54. Замкнутые электроприводы с подчиненным регулированием координат.. Замкнутые электроприводы с подчиненным регулированием координат. Эффективное и качественное регулирование координат в системе П - Д обеспечивает принцип подчиненного регулирования, реализуемый по структурной схеме, приведенной на рис. 11.4. Напомним, что этот принцип предусматривает регулирование каждой координаты с помощью своего отдельного регулятора и соответствующей обратной связи, т. е. регулирование каждой координаты происходит в собственном замкнутом контуре и требуемые характеристики ЭП в статике и динамике можно получить за счет выбора схемы и параметров регулятора этой координаты и цепи ее обратной связи. У 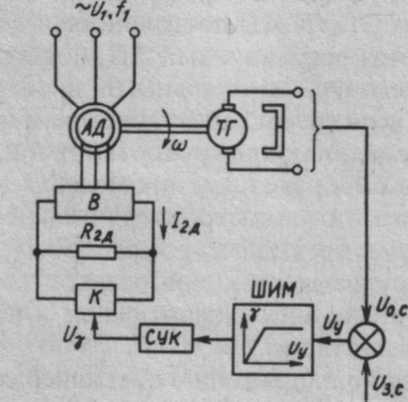 правление внутренним контуром с помощью выходного сигнала внешнего контура определяет еще одно ценное свойство таких систем. Оно заключается в возможности простыми средствами ограничивать любую регулируемую координату, например ток и момент, на заданном уровне. Для этого требуется всего лишь ограничить сигнал, поступающий с внешнего контура. правление внутренним контуром с помощью выходного сигнала внешнего контура определяет еще одно ценное свойство таких систем. Оно заключается в возможности простыми средствами ограничивать любую регулируемую координату, например ток и момент, на заданном уровне. Для этого требуется всего лишь ограничить сигнал, поступающий с внешнего контура.Рассмотрим схему ЭП (рис. 11.26, а) с подчиненным регулированием, выходной регулируемой координатой которой является скорость. Управляющая часть схемы состоит из двух замкнутых контуров: контура регулирования тока (момента), содержащего регулятор тока РТ и датчик тока ДТ, и контура регулирования скорости, содержащего регулятор скорости PC и датчик скорости (тахогенератор) ТГ. Р 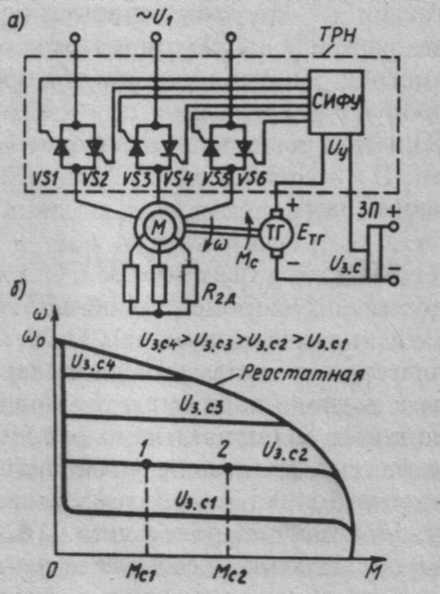 егуляторы тока и скорости в большинстве схем ЭП этого типа выполняются на базе операционных усилителей. Включение в цепь задающего сигнала скорости U3C регулятора скорости PC и его обратной связи резисторов R1 и Rос1 обеспечивает изменение (усиление или ослабление) этого сигнала с коэффициентом k1=Rос1/ R1 Аналогично изменение сигнала обратной связи по скорости Uос . происходит с коэффициентом k2- Roс1/R2. Такой регулятор получиг. название пропорционального регулятора скорости. егуляторы тока и скорости в большинстве схем ЭП этого типа выполняются на базе операционных усилителей. Включение в цепь задающего сигнала скорости U3C регулятора скорости PC и его обратной связи резисторов R1 и Rос1 обеспечивает изменение (усиление или ослабление) этого сигнала с коэффициентом k1=Rос1/ R1 Аналогично изменение сигнала обратной связи по скорости Uос . происходит с коэффициентом k2- Roс1/R2. Такой регулятор получиг. название пропорционального регулятора скорости.П  ри включении в цепь ОУ конденсаторов (реактивных электрических элементов) его функциональные возможности по преобразованию электрических сигналов становятся шире. Так, включение в цепь обратной связи регулятора тока РТ конденсатора Сос после- ри включении в цепь ОУ конденсаторов (реактивных электрических элементов) его функциональные возможности по преобразованию электрических сигналов становятся шире. Так, включение в цепь обратной связи регулятора тока РТ конденсатора Сос после-Будем считать что у крали сёдня разгрузочный день=) д  овательно с резистором Roc2 позволяет получить на выходе РТсигнал в виде суммы двух составляющих: овательно с резистором Roc2 позволяет получить на выходе РТсигнал в виде суммы двух составляющих:Uy = k3Uвх+k4∫Uвхdt, где k3 k4 - коэффициенты усиления сигналов. Здесь сигнал Uу содержит пропорциональную и интегральную составляющие входного сигнала Uвх т.е. РТ является в этом случае пропорционально-интегральным (П - И) регулятором. По каким же критериям и условиям выбираются схема и параметры цепей того или иного регулятора? Основным условием здесь является желаемый (заданный) характер переходных процессов при регулировании координат. Из всех возможных их видов обычно выбираются переходные процессы с затухающими колебаниями (см. рис. 11.26, б), что является оптимальным в том смысле, что позволяет обеспечить устойчивость этих процессов при небольших длительностях и перерегулированиях 55.Замкнутые схемы управления ЭП с ДПТ с обратными связями по скорости и току. з  амкнутая схема электрического привода с двигателями постоянного тока с обратными связями по скорости и току. Для получен жестких характеристик ЭП, необходимых для регулирования с роста, и мягких характеристик, требуемых для ограничения тока момента, т. е. при регулировании двух координат, применяются . ответствующие обратные связи. В схеме ЭП с нелинейными обр_ ными связями по скорости и току (рис. 11.25, а) для обеспечения :-; линейности цепей обратных связей используются узел токоогра:-чения УТО и узел ограничения скорости УСО, характеристики i торых показаны внутри соответствующих условных изображен Приведенная схема соответствует схеме с общим усилителем и линейными обратными связями (см. рис. 11.3), которые опре ют разделение области механических характеристик (см. г 11.25, б) на три зоны -1, II и III. амкнутая схема электрического привода с двигателями постоянного тока с обратными связями по скорости и току. Для получен жестких характеристик ЭП, необходимых для регулирования с роста, и мягких характеристик, требуемых для ограничения тока момента, т. е. при регулировании двух координат, применяются . ответствующие обратные связи. В схеме ЭП с нелинейными обр_ ными связями по скорости и току (рис. 11.25, а) для обеспечения :-; линейности цепей обратных связей используются узел токоогра:-чения УТО и узел ограничения скорости УСО, характеристики i торых показаны внутри соответствующих условных изображен Приведенная схема соответствует схеме с общим усилителем и линейными обратными связями (см. рис. 11.3), которые опре ют разделение области механических характеристик (см. г 11.25, б) на три зоны -1, II и III.В   зоне I в диапазоне токов от 0 до Iотс действует только обрат -связь по скорости, обеспечивая жесткие характеристики ЭП. В зоне зоне I в диапазоне токов от 0 до Iотс действует только обрат -связь по скорости, обеспечивая жесткие характеристики ЭП. В зонеII при I > Iотс вступает в действие обратная связь по току и характеристики становятся мягче. При дальнейшем увеличении тока и падении скорости ниже скорости отсечки шотс перестает действовать обратная связь по скорости, а за счет действия связи по току характеристики становятся еще мягче (зона III), т.е. обеспечивается требуемое ограничение тока и момента. После формирования требуемых статических характеристик в замкнутом ЭП, построенном по схеме с общим усилителем, может оказаться, что его динамические характеристики неприемлемы -движение в переходных процессах или оказывается неустойчивым, или характеризуется перерегулированием и колебаниями, или имеет значительное время протекания. В этих случаях требуется коррекция законов управления ЭП. Сущность коррекции динамических характеристик ЭП заключается в том, что в его схему включаются дополнительные (корректирующие) устройства, позволяющие нужным образом изменять эти характеристики. Определение схемы (структуры), параметров и места включения корректирующих устройств, или, как говорят, их синтез, производится по заданным критериям качества переходных процессов методами, разработанными в теории автоматического регулирования и ЭП [6, 9]. Не останавливаясь на описании этих методов и схем используемых корректирующих устройств, отметим, что цель коррекции состоит в получении и использовании в схеме ЭП дополнительных сигналов управления, пропорциональных производным и интегралам от основных сигналов. Другими словами, коррекция динамических характеристик ЭП предусматривает использование дополнительных гибких обратных связей. Эти связи по принципу своего действия проявляют себя только в переходных процессах, участвуя в формировании заданных динамических характеристик ЭП и не изменяя в то же время полученные с помощью жестких (постоянно действующих) обратных связей статические характеристики 57. Регулирование скорости электропривода. Общие положения и основные понятия. Регулирование скорости электропривода применяют в установках с переменной нагрузкой для изменения производительности холодильных компрессоров. Регулирование скорости электропривода осуществляется одновременным изменением частоты и напряжения, подводимого к ротору МДП. Предполагается, что статический преобразователь частоты безынерционен, и заданные частота и напряжение, связанные определенным законом, устанавливаются мгновенно. П 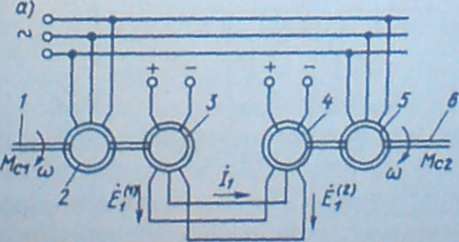 оказатели регулирования. оказатели регулирования.1. Диапазон регулирования - это отношение наибольшей скорости вращения, получаемой в ЭП, к наименьшей: D = ωmax / ωmin 2. Плавность регулирования, определяемая как отношение скоростей на двух соседних ступенях регулирования: К = ωK / ωK+ 1, при этом ωК > ωК + 1 Плавность тем выше, чем К ближе к единице. 3. Стабильность скорости вращения при изменении нагрузки соответствует отношению приращения момента на данной характеристике к приращению скорости: C = ΔM / Δω. Стабильность тем выше, чем меньше изменение скорости при увеличении нагрузки на валу двигателя. 4. Потери энергии при регулировании в регулирующих элементах. Для их снижения регулирующие элементы избегают включать в главные цепи. 5. Допустимая нагрузка на валу двигателя, определяемая нагревом его обмоток и скоростью вращения двигателей с самовентиляцией. Различают регулирование скорости в двух зонах: с постоянным моментом 1 и с постоянной мощностью 2. Направление регулирования скорости вверх или вниз от основной (номинальной скорости). 58. Замкнутые схемы управления ЭП с АД. - Замкнутая схема управления Асин. ЭП, выполненного по сис. ”тиристорный регулятор напряжения-двигатель”(ТРН-АД) З  амкнутый ЭП с частотным управлением АД. амкнутый ЭП с частотным управлением АД.-Замкнутая схема импульсного регулирования скорости АД с помощью резистора в цепи ротора. 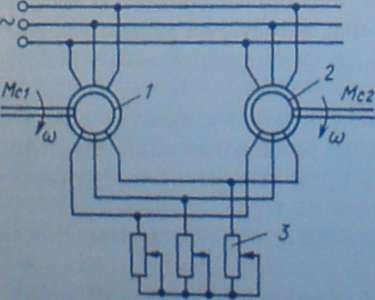 |