шпора 1. Шпора 1. 1. Статические и динамические моменты. Механическая характеристика механизма. Уре движения
 Скачать 1.35 Mb. Скачать 1.35 Mb.
|

|
12.ЭЛЕКТРОПРИВОД С ЭЛЕКТРИЧЕСКИМ ВАЛОМ. В ряде случаев при необходимости использования взаимосвязанного ЭП непосредственное механическое соединение отдельных двигателей оказывается затруднительным, так как это потребует увеличения длины и диаметра соединительных валов, числа опорных подшипников и др. Иногда механическое соединение валов двигателей вообще оказывается невозможным из-за их значительного удаления друг от друга. В этих случаях вместо громоздкой механической передачи используется так называемая система электрического вала, в которой согласованное движение двигателей обеспечивается соответствующей электрической схемой их соединения. Помимо упрощения кинематической схемы рабочей машины применение электрического вала позволяет облегчить автоматизацию технологических процессов, повысить точность работы, устранить возможное явление механического резонанса. Электрический вал находит применение для привода разводных мостов, затворов шлюзовых камер, мощных мостовых кранов, транспортеров и др. Современные системы электрического вала делятся на две основные группы: с вспомогательными уравнительными машинами и основными рабочими машинами. Вспомогательные синхронные или асинхронные машины служат для выравнивания нагрузки на валах основных двигателей. В другой группе уравнительные машины отсутствуют и их функции выполняют основные машины. Схема электрического вала с синхронными уравнительными машинами приведена на рис. 7.4, а. На валах 1 и 6 главных асинхронных двигателей 2 и 5 установлены идентичные уравнительные синхронные машины 3 к 4, статорные обмотки которых включены таким образом, чтобы наводимые в них ЭДС и £} были направлены навстречу друг другу. К валам 1 и 6 двигателей приложена соответственно механическая нагрузка Мс1 и М. 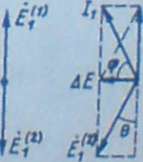 При одинаковых скоростях и нагрузках первой (2 и 3) и второй (4 и 5) пар двигателей векторы ЭДС синхронных машин 3 и 4 будут равны по значению и направлены навстречу друг другу (см. рис. 7.4,6). При этом ток в цепи статоров этих машин равен нулю и машины не развивают никаких моментов. Рис. 7.4 Если в процессе работы нагрузка на одном из валов, например на втором, возрастет, то вектор ЭДС машины 4 £} ' повернется в сторону отставания на некоторый угол 0 (см. рис. 7.4, в). В результате этого в цепи статорных обмоток начнет действовать разность ЭДС, под действием которой по обмоткам статоров машин 3 и 4 потечет ток, (его часто называют уравнительным), и они начнут развивать момент. Так как проекция вектора тока, на вектор ЭДС положительна, а на вектор £f2) отрицательна, то машина 3 начнет работать генератором, создавая на валу J тормозной момент, а машина 4 - двигателем. В соответствии с этим суммарный движущий момент на валу 6 возрастет и его скорость увеличится, а на валу 1 движущий момент уменьшится и его скорость снизится, т.е. валы 1 и 6 вновь начнут вращаться с одинаковой скоростью (синхронно). Рассмотренная система электрического вала имеет существенный недостаток - отсутствие синхронизирующего момента при нулевой скорости машин, так как их ЭДС в этом случае равны нулю. По этой причине чаще в качестве уравнительных машин используются асинхронные машины. Схема электрического вала с асинхронными уравнительными машинами приведена на рис. 7.5,а. Эта схема по принципу своего действия во многом схожа со схемой, приведенной на рис. 7.4,а 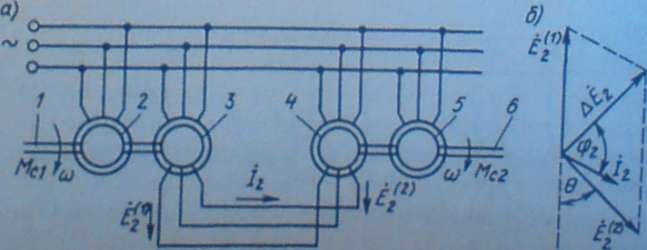 Рис. 7.5 Работа электрического вала происходит следующим образом. Если нагрузка валов обоих машин одинакова, то они вращаются синхронно с одинаковой скоростью. Вследствие вcречного направления ЭДС вспомогательных машин равных по значению, ток I2 в цепи их роторов будет отсутствовать, и машины 3 и 4 моменты развивать не будут. Схема электрического вала без вспомогательных машин приведена на рис. 7.6. Система электрического вала может быть выполнена также только из основных двигателей, которые в этом случае выполняют функции как рабочих, так и уравнительных машин. Для этого статорные обмотки двигателей 1 и 2 подключаются параллельно к питающей сети, а роторные соединяются встречно. Параллельно обмоткам ротора во все три фазы включаются регулируемые резисторы 3 с сопротивлением. При R2д= 0 электрический вал работает как обычные, независимо работающие друг от друга асинхронные двигатели с короткозамкнутыми роторами. При R2д не=0 и вращении АД с одинаковой скоростью угол сдвига между векторами ЭДС машин 8 = 0 и они развивают одинаковые моменты, работая на реостатных характеристиках. При увеличении нагрузки одного из двигателей угол 0 становится не равным нулю, поэтому появляются уравнительные ток и момент. Уравнительный момент будет разгружать машину с большей нагрузкой и догружать менее нагруженную, при этом скорости двигателей выравняются, а положение их роторов будет характеризоваться некоторым углом рассогласования 6*0. Максимально допустимый угол рассогласования для рассматриваемой схемы, как и для системы с уравнительными машинами, составляет пи/2. Основным достоинством электрического вала с основными рабочими машинами является отсутствие вспомогательных машин. Однако для увеличения уравнительного момента путем повышения скольжения в роторную цепь двигателей необходимо включать дополнительные сопротивления, что приводит к дополнительным потерям мощности в ней. Обычно электрический вал с основными рабочими машинами применяется лишь при небольшой разнице моментов нагрузки, приложенных к обоим валам. 15.РЕГУЛИРОВАНИЕ СКОРОСТИ Регулирование скорости движения исполнительных органов требуется во многих рабочих машинах и механизмах – прокатных станах, подъемно-транспортных механизмах, горнодобывающих и бумагоделательных машинах, металлообрабатывающих станках и др. С помощью ЭП обеспечиваются регулирование и стабилизация скорости движения их ИО, а также изменение скорости ИО в соответствии с произвольно изменяющимся задающим сигналом (слежение) или по заранее заданной программе (программное движение), рассмотрим, каким образом с помощью ЭП можно обеспечивать регулирование скорости ИО рабочих машин. Регулировать скорость движения ИО можно воздействуя или на механическую передачу, или на двигатель, или на то и другое одновременно. В первом случае воздействие заключается в изменении передаточного числа i или радиуса приведения р механической передачи при постоянной скорости двигателя, поэтому этот способ регулирования получил название механического. Для его реализации используются коробки передач (при ступенчатом регулировании), вариаторы и электромагнитные муфты (для плавного регулирования). (Применяется механический способ ограниченно из-за сложности автоматизации таких технологических процессов, малого набора регулируемых механических передач указанного типа и их невысоких надежности и экономичности. Способ регулирования скорости ИО, получивший название электрического, предусматривает воздействие на двигатель при неизменных параметрах механической передачи. Этот способ нашел широкое применение в современных ЭП вследствие его больших регулировочных возможностей, простоты, удобства использования в общей схеме автоматизации технологических процессов и экономичности. Комбинированный способ регулирования скорости ИО применяется ограниченно в основном в ЭП металлообрабатывающие станков. Для количественной оценки и сопоставления различных способов регулирования скорости используются следующие показатели:Диапазон регулирования скорости, определяемый отношением максимальной скорости к минимальной, т.е. D = wmax/wmin. Стабильность скорости, характеризуемая изменением скорости при возможных колебаниях момента нагрузки на валу двигателя и определяемая жесткостью его механических характеристик. Чем она больше, тем стабильнее скорость при изменениях момента нагрузки, и наоборот. В рассматриваемом примере большая стабильность обеспечивается при искусственной характеристике 3. Плавность регулирования скорости, определяемая перепадом скорости при переходе с одной искусственной характеристики на другую. Чем больше в заданном диапазоне регулирования скорости может быть получено искусственных характеристик, тем плавнее будет происходить регулирование скорости. Направление регулирования скорости. Допустимая нагрузка двигателя. Электрический двигатель рассчитывается и проектируется таким образом, чтобы, работая на естественной характеристике с номинальными скоростью, током, моментом и мощностью, он не нагревался выше определенной температуры, на которую рассчитана его изоляция. В этом случае срок его службы является нормативным и составляет обычно 15...20 лет. Все способы регулирования скорости делятся по этому признаку на две группы, для одной из которых характерна допустимая нагрузка, равная номинальному моменту, а для другой - равная номинальной мощности двигателя. При правильном выборе способа регулирования скорости двигатель полностью используется в соответствии со своими возможностями во всем диапазоне ее изменения. Экономичность регулирования скорости. Получение одних и тех же показателей (диапазона, стабильности, плавности и т.д.) можно обеспечить с помощью различных ЭП и способов регулирования их скорости. 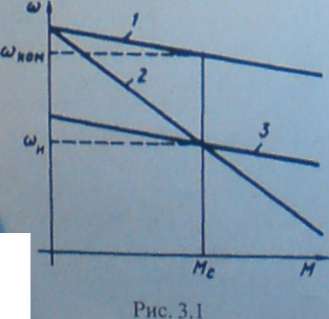 16.КОЭФФИЦИЕНТ ПОЛЕЗНОГО ДЕЙСТВИЯ ЭЛЕКТРОПРИВОДА. КПД работающего двигателя зависит от развиваемой им полезной механической мощности на валу. При малых нагрузках КПД двигателя небольшой, по мере увеличения нагрузки он растет, достигая максимального значения при мощности, несколько меньшей номинальной. Способы повышения КПД двигателей могут быть следующими: ограничение времени работы двигателя на холостом ходу; обеспечение нагрузки двигателя при работе, близкой к номинальной (в том числе путем замены малозагруженного двигателя на двигатель меньшей мощности, что необходимо обосновать экономически, т.е. капитальные затраты на замену должны окупиться за счет сокращения эксплуатационных расходов); применение регулятора экономичности; снижение потерь энергии в переходных режимах. В регулируемых ЭП должны применяться способы, характеризующиеся малыми потерями мощности, например частотное регулирование скорости асинхронных и синхронных двигателей. КОЭФФИЦИЕНТ МОЩНОСТИ ЭЛЕКТРОПРИВОДАЭП, подключаемые к сети переменного тока, потребляют из нее активную и реактивную мощности. Если ЭП работает в каком-то цикле при различных нагрузках или скоростях в установившемся и переходном режимах, то он как потребитель реактивной энергии характеризуется средневзвешенным или цикловым коэффициентом мощности, который определяется отношением потребленной активной энергии за цикл Аа к полной или кажущейся энергии Ап. Коэффициентом мощности характеризуется работа ЭП с двигателями переменного тока (АД и СД), а также системы ЭП постоянного тока «управляемый выпрямитель - двигатель постоянного тока». Повышение коэффициента мощности и уменьшение несинусоидальности напряжения сети при работе системы УВ - ДПТ может быть достигнуто несколькими способами: за счет применения фильтрокомпенсирующих и фильтросимметрирующих устройств, обеспечивающих одновременно компенсацию реактивной мощности, фильтрацию высших гармоник и уменьшение отклонений напряжения по фазам. Эти устройства целесообразно размещать в узле подключения ЭП к электрической сети. Состоят они из управляемого компенсатора, обеспечивающего регулирование реактивной мощности и выполняемого обычно на основе специального тиристорного преобразователя, и энергетического фильтра, который служит для фильтрации высших гармоник ЭП, а также компенсаций реактивной мощности, Энергетические фильтры представляют собой последовательные индуктивно-ёмкостные резонансные цепи, настроенные на частоты высших гармоник вентильных ЭП (нагрузок). Число параллельно включенных резонансных цепей фильтров должно быть таким, чтобы коэффициент несинусоидальности напряжения был не более 5%. Для каждой высшей гармоники используется свой фильтр; путем использования традиционных компенсирующих устройств, к числу которых относятся синхронные двигатели и компенсаторы, батареи конденсаторов, а также тиристорные источники реактивной мощности. Синхронные двигатели являются эффективным и удобным средством компенсации реактивной мощности в системе электроснабжения. Выполняя свою основную функцию приводного электродвигателя, СД одновременно может генерировать в сеть реактивную мощность, т.е. работать с опережающим cos ср, что обеспечивается соответствующим регулированием их тока возбуждения. Синхронные компенсаторы представляют собой СД, работающие без нагрузки. Их основная функция состоит только в регулировании реактивной мощности в системе электроснабжения. Конденсаторы по своему действию эквивалентны перевозбужденным СД, по сравнению с другими источниками реактивной мощности они имеют такие преимущества, как малые потери этой мощности, простота монтажа и эксплуатации. К их недостаткам следует отнести зависимость генерируемой мощности от напряжения, недостаточную стойкость при перегрузках по току и напряжению, а также (ухудшение их работы в сетях с повышенным содержанием высших гармоник. Тиристорные источники реактивной мощности строятся с использованием преобразователей, имеющих искусственную коммутацию вентилей. Такой преобразователь имеет на стороне выпрямленного тока реактор (индуктивный накопитель энергии) или батарею конденсаторов. 16.КОЭФФИЦИЕНТ ПОЛЕЗНОГО ДЕЙСТВИЯ ЭЛЕКТРОПРИВОДА. КПД работающего двигателя зависит от развиваемой им полезной механической мощности на валу. При малых нагрузках КПД двигателя небольшой, по мере увеличения нагрузки он растет, достигая максимального значения при мощности, несколько меньшей номинальной. Способы повышения КПД двигателей могут быть следующими: ограничение времени работы двигателя на холостом ходу; обеспечение нагрузки двигателя при работе, близкой к номинальной (в том числе путем замены малозагруженного двигателя на двигатель меньшей мощности, что необходимо обосновать экономически, т.е. капитальные затраты на замену должны окупиться за счет сокращения эксплуатационных расходов); применение регулятора экономичности; снижение потерь энергии в переходных режимах. В регулируемых ЭП должны применяться способы, характеризующиеся малыми потерями мощности, например частотное регулирование скорости асинхронных и синхронных двигателей. КОЭФФИЦИЕНТ МОЩНОСТИ ЭЛЕКТРОПРИВОДАЭП, подключаемые к сети переменного тока, потребляют из нее активную и реактивную мощности. Если ЭП работает в каком-то цикле при различных нагрузках или скоростях в установившемся и переходном режимах, то он как потребитель реактивной энергии характеризуется средневзвешенным или цикловым коэффициентом мощности, который определяется отношением потребленной активной энергии за цикл Аа к полной или кажущейся энергии Ап. Коэффициентом мощности характеризуется работа ЭП с двигателями переменного тока (АД и СД), а также системы ЭП постоянного тока «управляемый выпрямитель - двигатель постоянного тока». Повышение коэффициента мощности и уменьшение несинусоидальности напряжения сети при работе системы УВ - ДПТ может быть достигнуто несколькими способами: за счет применения фильтрокомпенсирующих и фильтросимметрирующих устройств, обеспечивающих одновременно компенсацию реактивной мощности, фильтрацию высших гармоник и уменьшение отклонений напряжения по фазам. Эти устройства целесообразно размещать в узле подключения ЭП к электрической сети. Состоят они из управляемого компенсатора, обеспечивающего регулирование реактивной мощности и выполняемого обычно на основе специального тиристорного преобразователя, и энергетического фильтра, который служит для фильтрации высших гармоник ЭП, а также компенсаций реактивной мощности, Энергетические фильтры представляют собой последовательные индуктивно-ёмкостные резонансные цепи, настроенные на частоты высших гармоник вентильных ЭП (нагрузок). Число параллельно включенных резонансных цепей фильтров должно быть таким, чтобы коэффициент несинусоидальности напряжения был не более 5%. Для каждой высшей гармоники используется свой фильтр; путем использования традиционных компенсирующих устройств, к числу которых относятся синхронные двигатели и компенсаторы, батареи конденсаторов, а также тиристорные источники реактивной мощности. Синхронные двигатели являются эффективным и удобным средством компенсации реактивной мощности в системе электроснабжения. Выполняя свою основную функцию приводного электродвигателя, СД одновременно может генерировать в сеть реактивную мощность, т.е. работать с опережающим cos ср, что обеспечивается соответствующим регулированием их тока возбуждения. Синхронные компенсаторы представляют собой СД, работающие без нагрузки. Их основная функция состоит только в регулировании реактивной мощности в системе электроснабжения. Конденсаторы по своему действию эквивалентны перевозбужденным СД, по сравнению с другими источниками реактивной мощности они имеют такие преимущества, как малые потери этой мощности, простота монтажа и эксплуатации. К их недостаткам следует отнести зависимость генерируемой мощности от напряжения, недостаточную стойкость при перегрузках по току и напряжению, а также (ухудшение их работы в сетях с повышенным содержанием высших гармоник. Тиристорные источники реактивной мощности строятся с использованием преобразователей, имеющих искусственную коммутацию вентилей. Такой преобразователь имеет на стороне выпрямленного тока реактор (индуктивный накопитель энергии) или батарею конденсаторов.17.РЕЖИМЫ РАБОТЫ ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА НЕЗАВИСИМОГО ВОЗБУЖДЕНИЯ. Электрическая машина обладает так называемым свойством обратимости, т.е. она может работать как двигателем, преобразуя центрическую энергию в механическую, так и генератором, осуществляя обратное преобразование энергии. При этом переход из одного режима в другой может происходить без изменения схемы включения. При работе двигателей в генераторном режиме на валу электрической машины создается тормозной момент, обеспечивающий интенсивное принудительное замедление (торможение) движения ЭП и, следовательно, расширяющий его возможности по управлению движением исполнительного органа (в частности, при его торможении и реверсе). Энергетический режим работы электрической машины можно определить исходя из взаимных направлений двух переменных: электрических (ЭДС Е и тока I) или механических (момента М и скорости со). Режим холостого хода (точка А). Двигатель не получает энергии ни из электрической сети (за исключением электроэнергии на возбуждение), ни с вала. В этом режиме I= 0, Е = U = кФw0, М=0, w=w0 (см. рис. 4.3, а) Двигательный режим (участок I характеристики на рис. 4.1, б) в диапазоне 0 < w < w0, т.е. в первом квадранте, где w и М совпадают по направлению. В этом режиме E<Ut ток I = (U- Е)/R совпадает по направлению с напряжением U и не совпадает с ЭДС, электрическая энергия (ЭЭ) поступает из сети, а механическая энергия (МЭ) с вала двигателя передается исполнительному органу (см. рис. 4.3, б). Генераторный режим работы параллельно с сетью или торможение с рекуперацией энергии в сеть (участок II характеристики на рис. 4.1, б). На этом участке w > w0, поэтому ЭДС больше напряжения сети, ток и момент изменяют свои направления на противоположные. Двигатель получает механическую энергию от рабочей машины и отдает ее (рекуперирует) в виде электроэнергии в сеть (см. рис. 4.3, в). 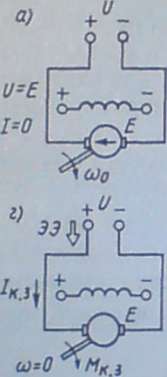 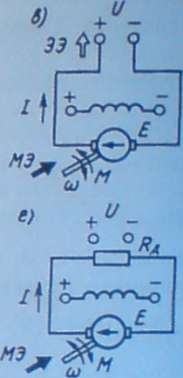 Режим короткого замыкния возникает при W = 0 и E = 0. В этом режиме, согласно (4.1) / = /кз= U/ R, электрическая энергия, поступая из сети, рассеивается в виде тепла в резисторах якорной цепи. Механическая энергия с вала ДПТ не отдается, так как W = 0 (см рис. 4.3, г). Режим генератора при его последовательном соединении с сетью иля торможение противовключением наступает при W < 0 (участок характеристики на рис. 4.1,6). За счет изменения направления скорости ЭДС также меняет свою полярность. Ток в якоре совпадает по направлению с напряжением и ЭДС и определяется их суммарным действием, т.е. / = (U + E)/R. В результате электроэнергия. поступающая из сети и вырабатываемая самим двигателем за механической энергии рабочей машины, рассеивается в виде Ниш в резисторах цепи якоря (см. рис. 4.3, д). Режим автономного генератора или динамическое торможение возникает при включении двигателя по схеме рис. 4.2. В этом случае ток в якоре протекает под действием ЭДС и совпадает с ней по направлению. Электроэнергия вырабатывается за счет поступающей с вала механической энергии рабочей машины и рассеивается в Виде тепла в резисторах якорной цепи. Таким образом, торможение ЭП реализуется при трех разновидностях генераторного режима работы ДПТНВ. Эффективность электромеханического преобразования энергии "двигателя оценивается коэффициентом полезного действия (КПД), который определяется отношением механической мощности на его валу Рмех= Мсо к потребляемой из сети электрической мощности. 18. РАСЧЁТ МОЩНОСТИ И ВЫБОР ДВИГАТЕЛЕЙ. Основным требованием при выборе электродвигателя является его соответствие условиям технологического процесса рабочей машины. Задача выбора состоит в поиске такого двигателя, который будет обеспечивать заданный технологический цикл рабочей машины, иметь конструкцию, соответствующую условиям эксплуатации и компоновки с рабочей машиной, а его нагрев при этом не должен превышать нормативный (допустимый) уровень. Выбор двигателя недостаточной мощности может привести к на- рушению заданного технологического цикла и снижению производительности рабочей машины. Происходящие при этом его повышенный нагрев и ускоренное старение изоляции определяют преждевременный выход самого двигателя из строя, останов рабочей машины и соответствующие экономические потери. Недопустимым является также использование двигателей завышенной мощности, так как при этом, имея повышенную первоначальную стоимость, ЭП работает с низкими КПД и коэффициентом. Выбор электродвигателя производится обычно следующим образом: сначала рассчитывается требуемая мощность, затем предварительно выбранный двигатель проверяется по условиям J?^ перегрузке и нагреву. Если он удовлетворяет условиям проверки, то на этом выбор заканчивается, если же не удовлетворяет, бирается другой двигатель (как правило, большей мощности) и проверка повторяется. Основой для расчета мощности и выбора электродвигателя яв ляются нагрузочная диаграмма и диаграмма скорости (тахограмма) исполнительного органа рабочей машины. Выбор двигателя и проверка его по перегрузке и условиям пуска. По каталогу выбираем двигатель с ближайшими большими значениями мощности и скорости. Выбранный двигатель при этом должен по роду и значению напряжения соответствовать параметрам сетей переменного или постоянного тока или силовых преобразователей, к которым он подключается; по конструктивному исполнению - условиям его компоновки с исполнительным органом и способам крепления на рабочей машине, а по способу вентиляции и защиты от действия окружающей среды - условиям его работы. Выбранный двигатель проверяется по перегрузочной способности. Для этого рассчитывается зависимость его момента от времени M(t)9 т.е нагрузочная диаграмма двигателя. Она строится с помощью уравнения механического движения. |