ТАУ. Лекции ТАУ ч 2. 56 Законы регулирования
 Скачать 0.85 Mb. Скачать 0.85 Mb.
|

56 Законы регулированияПредставим регулятор в виде одного блока, включающего в себя все элементы.  На вход регулятора поступает изменение ошибки eX . Выходной сигнал представляет перемещение ИМ M. Происходит преобразование сигнала ошибки  Выбор закона регулирования и его настроечных параметров определяет качество работы всей системы регулирования. Законы регулирования получают с помощью КУ, последовательных и параллельных. Законов регулирования теоретически сколь угодно много. В судовой автоматике используются типовые законы регулирования: - пропорционально интегрально дифференциальный (ПИД)  - коэффициент пропорциальности - коэффициент пропорциальности Выбор их значений производится из условий обеспечения требуемого качества работы САР. Существуют и другие модификации ПИД закона регулирования Остальные законы регулирования являются частным случаем ПИД закона Пропорциональный П: Пропорционально интегральный ПИ: Пропорционально дифференциальный ПД: Рассмотрим получение законов регулирования САР с параллельным КУ.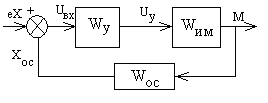 В таких системах в качестве параллельных КУ используются местные обратные связи регулятора с передаточной функцией Wос. Передаточные функции Wу и Wим жестко определяются конструктивными параметрами этих элементов, т.о. изменить передаточную функцию Wрег можно за счет выбора передаточной функции Wос. Wрег представляет собой передаточную функцию закона регулирования. Рассмотрим САР с последовательным КУ. В этих системах в КУ происходит преобразование сигнала eX по формуле закона регулирования. В этом случае динамические свойства усилителя и ИМ искажают закон регулирования, что может вызвать ухудшение качества работы САР. Рассмотрим САР со следящей системой. Следящая система вносит меньше искажения в закон регулирования. Пусть усилитель имеет такую передаточную функцию: Тогда передаточная функция следящей системы примет вид:  Пусть |