ТАУ. Лекции ТАУ ч 2. 56 Законы регулирования
 Скачать 0.85 Mb. Скачать 0.85 Mb.
|

59 Регулятор с гибкой ОС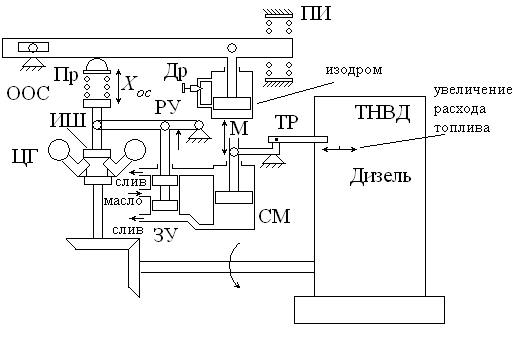 Принцип работы САР с гибкой обратной связью (ГОС) Первая часть действий совпадает с предыдущей Действия ГОС Шток сервомотора перемещает вниз корпус изодрома, заполненного рабочим маслом. Это вызывает перемещение вниз штока изодрома и поворот по часовой стрелке РОС поворачивается по часовой стрелке и дополнительно сжимает пружину ПР Это создает дополнительные усилия на измерительной шайбе ИШ, которая перемещается вниз и рычаг усилителя РУ поворачивается против часовой стрелки. Золотник усилителя также перемещается вниз, уменьшая площадь проходного сечения для рабочего масла. Это уменьшает скорость перемещения поршня СМ Одновременно происходит изменение силы сжатия пружин изодрома ПИ Это вызывает усилие на поршень изодрома, преобразуемое в разность давлений в полостях изодрома. Под воздействием этой разницы рабочее масло будет перетекать из одной полости в другую по каналу с регулируемыми дросселями ДР Т.о. РОС будет возвращаться в исходное равновесное состояние на этих режимах (равновесных), РОС занимает одно и тоже положение, а взаимное положение корпуса и поршня изодрома будут различными. Т.о. действие ОС отличается не равновесных режимах САР, т.е. данная САР является гибкой. Уравнение ОС Т.о. входным сигналом ОС является скорость перемещения ИМ Настроечные параметры: Уменьшение площади проходного сечения дросселя увеличивает Полное открытие дросселя соответствует отключению ОС На равновесных режимах: Т.е. действительно ОС является гибкой Операторные уравнения ГОС Рассмотрим работу ГОС при линейном перемещении ИМ На интервале Где График показывает, что увеличение Действие ГОС в этом случае приближается к действию ЖОС 60 Элементарные преобразователи сигналов для законов регулирования.Для получения типовых законов регулирования в последовательных КУ используются элементарные преобразователи сигналов. Соединение этих преобразователей различными способами дает различные модификации законов регулирования. Пропорциональный преобразователь  Это соответствует типовому пропорциональному усилительному звену Интегральный преобразователь (интегратор)  Дифференциальный преобразователь (дифференциатор)  Дифференцирование усиливает влияние высокочастотных помех на работу САР. Покажем это на ЛАЧХ 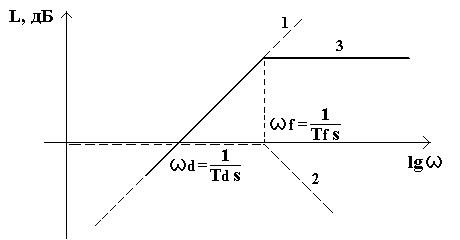 Рис. 3.4 Логарифмические амплитудные частотные характеристики канала дифференцирования. Линия (1) – ЛАЧХ идеального дифференциатора с передаточной функцией (2). Линия (1) показывает, что с ростом частоты амплитуда колебаний на выходе идеального дифференциатора неограниченно возрастает. Это плохо сказывается на работе САР. Поэтому дифференциаторы снабжаются простейшим фильтром, подключаемым последовательно. 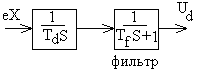 Фильтр представляет собой типовое динамическое инерционное звено Линия (2) ЛАЧХ фильтра соответствует его передаточной функции (3) Линия (2) показывает, что с ростом частоты амплитуда колебаний сигналов на входе фильтров неограниченно уменьшается. ЛАЧХ дифференциатора с фильтром. где ЛАЧХ дифференциатора с фильтром изображается линией (3) Линия (3) показывает, что при больших частотах |