Госник. 1. Устройство и принцип работы турбобура. Характеристика турбобурдолотозабой. Определение момента затяжки деталей
 Скачать 6.78 Mb. Скачать 6.78 Mb.
|

|
Рис. 5.6. Устьевая арматура: 1 - колонная головка; 2 - затрубный ниппель; 3 - вентиль манометра; 4 - затруб- ный патрубок с вентилем; 5 - трубная головка; 6 - торйник; 7 - сальник; 8 - гайка. Для подвески насосных труб, вывода продукции скважины в выкидную линию, герметизации устья, а также для отбора газа из затрубного пространства, на устье скважины устанавливают специальное оборудование. Это оборудование состоит из планшайбы и тройника-сальника. Известно много конструкций устьевого оборудования насосных скважин, изготовляемых как на заводах, так и в мастерских НГДУ. Наиболее известной конструкцией долгое время было оборудование СГН, созданное в АзИНМАШе более 20 лет тому назад. В этой конструкции планшайба с подвешенными на ней трубами устанавливается на колонный фланец. В верхнюю муфту труб ввинчивают тройник для отвода нефти. Выше тройника для его герметизации и пропуска сальникового штока устанавливают сальник, набивку которого уплотняют сверху крышкой. В связи с широким внедрением напорных систем сбора нефти и газа появилась необходимость применять на устье глубиннонасосных скважин оборудование, работающее при повышенных давлениях. С этой целью применяют устьевые сальники с самоустанавливающимися головками (СУСГ1, и СУСГ2).  Устьевой сальник СУСГ2. 1 - тройник; 2, 6, 8 - нижняя, промежуточная (средняя) и верхняя втулки; 3 - шаровая головка; 4 - нижний и верхний манжетодержатели; 5 - нижняя и верхняя сальниковые набивки; 7 -корпус сальника; 9 - вкладыши; 10 - крышка корпуса; 11 - ручка; 12 - уплотнительное кольцо; 13 - стопор; 14 -ниппель; 15 - накидная гайка; 16 - наконечник; 17- гайка; 18 - крыш ка; 19 - откидной болт; 20 - палец Сальник СУСГ2 с двойным уплотнением (рис. 37) состоит из двух основных узлов: самоустанавливающейся шаровой головки и тройника. В шаровой головке помещены нижняя и промежуточная (средняя) втулки, нижний манжетодержатель и нижняя сальниковая набивка. В корпусе сальника, навинченном на головку, помещены верхний манжетодержатель, верхняя сальниковая набивка и верхняя втулка (грундбукса). Сальниковую набивку подтягивают крышкой, навинченной на корпус. В верхней части крышки предусмотрен резервуар для масла, служащий для смазки трущихся поверхностей сальникового штока и вкладышей. Шаровая головка в тройнике удерживается крышкой 18, закрепленной двумя откидными болтами и гайками. Болты в тройнике установлены при помощи пальцев. Тройник снабжен специальным устройством для присоединения сальника к выкидной линии, состоящим из наконечника, ниппеля и накидной гайки. Устьевой сальник с самоустанавливающейся головкой с двойным уплотнением позволяет заменять изношенные сальниковые набивки без разрядки скважины. Сальник-тройник должен быть герметичен. Во время работы насосной установки необходимо следить, не пропускает ли сальник жидкость, и обнаруженные в нем дефекты надо немедленно устра нять, потому что утечки через сальник ведут к загрязнению пло щадки вокруг устья скважины и к потере нефти. 31.Конструкция станка-качалки (СК). Кинематические показатели СК. Усовершенствование кинематики и конструкции СК. Основные критерии совершенства СК. Станок-качалка применяется в умеренном и холодном макроклиматических районах. Основные узлы станка-ка чалки - рама, стойка в виде усеченной четы рехгранной пирамиды, балансир с поворотной головкой, траверса с шатунами, шарнирно подвешенные к баланси ру, редуктор с кривошипами и противовесами - комплек туется набором сменных шкивов для изменения числа ка чаний. Для быстрой смены и натяжения ремней электро двигатель устанавливается на поворотной салазке., Станки-качалки выполняются в двух исполнениях: СК, выпускаемые семи и СКД, выпускаемые шести типоразмеров.  Отличительные особенности стан ков-качалок типа СКД следующие: кинематическая схема преобразующего механизма несимметричная (дезаксиальная-Д) с углом дезаксиала 9° и повышенным кинематичес ким отношением 0,6; меньшие габариты и масса; редуктор установлен непосредственно на раме станка-качалки. Принятое условное обозначение станка-качалки харак теризует: СК - станок-качалка; первая цифра - наибольшая допускаемая нагрузка на устьевой шток, х 10 кН; вторая цифра - длина хода точки подвеса штанг, м; третья цифра -наибольший допускаемый крутящий момент на ведомом валу редуктора, х 10-2 кНм. Станок-качалка типа СКД: 1 — подвеска устьевого штока; 2 — балансир с опорой; 3 — стойка; 4 — шатун; 5 — кривошип; 6 — редуктор; 7 — ведомый шкив; 8 — ремень; 9 — электро двигатель; 10 — ведущий шкив; 11 — ограждение; 12 — поворотная плита; 13 - рама; 14 — противовес; 15 — траверса; 16 — тормоз. Кинематика точки подвеса штанг Обозначим: кривошип отрезком ОА длиной r, шатун отрезком АВ длиной l, заднее ВС и переднее СД плечи балансира с длинами соответственно к и к1, база – расстояние между точками О и С длиной р. Рисунок – Кинематическая схема преобразующего механизма Элементарная теория основана на следующих допущениях: преобразующий механизм станка-качалки рассматривается как обычный кривошипно-шатунный (т.е. r/l=0; r/k=0).  Отсюда следует, что точка В движется по прямой В1, В2, а =0. В этом случае закон движения точки B, а следовательно, и точки подвеса штанг D может быть определен с помощью теории кривошипно-шатунного механизма. Приближенная методика (теория) основывается на допущении, что r/k=0, траектория движения точки В – прямая, т.е. по существу также является теорией кривошипно-шатунного механизма, в котором учитываются конечные величины соотношения r/l. Точная методика (теория) не содержит допущений, принятых в рассмотренных ранее теориях, кроме одного, принятого ранее и специально не оговоренного: мгновенная угловая скорость вращения кривошипа постоянна и неизменна в течение всего двойного хода точки подвеса штанг. Точные законы изменения перемещения, скорости и ускорения точки подвеса штанг могут быть получены двумя способами: аналитическим – искомые величины определяются посредством тригонометрических преобразований и графически – построением положений механизма, планов скоростей и ускорений для различных углов поворота кривошипа Приближенная и элементарная методики В1В= ОВ1- ОВ, где ОВ1 = r + l , а величина ОВ= Оа+ аВ. Величины Оа и аВ могут быть найдены из прямоугольных треугольников ВаА и ОаА: Ва=lcos, Оа=rcos. Окончательно можно записать: SB = r+l-( lcos + rcos) = r ( 1-cos)+l (1-cos). По теореме синусов для треугольников ОАВ следует, что r/sin=l/sin.откуда sin= (r/l) sin.Так как cos= 1- sin2, то подставив значение синуса и используя приближенную формулу для извлечения корня, получимcos=1- (r/l)2 sin2 1- 0,5(r/l)2 sin2. Подставив полученное значение в исходную формулу для SB и заменив =t, получим SB = r(1- cost) + (r2/2l) sint Искомое перемещение точки D определяется, исходя из перемещения точки В с учетом соотношения плеч балансира k1/k, SD = (k1/k) r(1- cost) + (r2/2l) sint. Скорость движения точки D получим, продифференцировав это уравнение: D = (k1/k) rsin t + (r2/2l) sin2t. Ускорение движения точки D определим, еще раз продифференцировав это уравнение: wD = (k1/k) 2rcost + (r/l)cos2t. максимальный путь SD будет при t=180, т.е. длина хода точки подвеса штанг SDmax = 2rk1/k, что максимального значения скорость достигнет при углах поворота кривошипа t= 90, 270 и будет равна Dmax = SDmax /2. Максимальное ускорение будет при t =0, 180 и равнo wmax = (2S/2)(1(r/l)). Уравнения описывают закон движения точки подвеса штанг при допущении, что траектория движения точки В – прямая. Если пренебречь также и величиной отношения r/l1, как это принимается в элементарной методике, то из полученных зависимостей после подстановки в них r/l =0, получим SD=(k1/k)r(1-cost),D=(k1/k)rsin,wD = (k1/k) 2rcost. Пути совершенствования cтанков-качалок Можно выделить два основных направ ления: 1) совершенствование кинематической схемы станков-качалок, разработка амортизаторов; 2) улучшение системы уравновешивания и самой кон струкции станка-качалки, компоновка ее узлов. Анализ соотношений длин звеньев четырехзвенника позволяет найти пути снижения габаритов станков-кача лок при допустимых значениях кинематических коэффи циентов. С этой целью были сопоставлены габариты стан ков-качалок, длина хода которых увеличена до определен ной величины за счет простого удлинения звеньев и за счет изменения отношений длин звеньев r/l и r/k. После днее дало значительный эффект. Продолжается анализ и сопоставление кинематических схем при опоре баланси ра в середине и в конце. Несмотря на более тесное распо ложение оборудования, схема с опорой на конце баланси ра привлекает возможностью резко сократить габаритыпо длине, а также габариты фундаментов. Эта схема осо бенно удобна при пневматическом уравновешивании. Разрабатывают и испытывают различные схемы амор тизаторов, значительно снижающих продольные собствен ные колебания штанг, а следовательно, нагрузки на штанги и станок-качалку. Это повышает их надежность. Амортизаторы встраивают в подвеску штанговой колон ны или в шатуны. В начале хода головки балансира вверх или вниз) амортизатор, деформируясь сам, увеличивает период разгона штанг, уменьшая ускорение их движения. Амортизаторы выполняли пружинными, но их большая же сткость (при требуемых нагрузках и малых габаритах) не позволила достаточно полно решить поставленную зада чу. Поэтому в последнее время исследователи перешли к изучению пневматических, гидравлических амортизаторов и амортизаторов с резиновыми элементами. 32. Тангенциальные силы на пальце кривошипа СК при комбинированном уравновешивании. Принцип расчета и выбора мощности электродвигателя для привода СК. Для прочностного расчета элементов СК, ее уравновешивания , выбора мощности двигателя необходимо знать зависимости описывающие изменения усилий на элементы СК в течении двойного хода. Одним из важнейших силовых факторов является тангенциальное усилие (Т), действующее на палец кривошипа. Определим это усилие для общего случая.  Имеем Мкр = Т*r, где Мкр - крутящих момент на ведомом валу редуктора. Т - тангенциальная составляющая усилия действующего на палец кривошипа r - радиус кривошипа. Т.к. r всегда постоянно, необходимо определить Т = f( от сил действующих на СК за полный оборот кривошипа). Для того, чтобы определить Т в зависимости от сил, действующих на СК и от положения механизма применяют теорему Жуковского о жестком рычаге. где uТ- скорость точки приложения силы Т Pi - величина каждой действующей силы на эту систему ui - скорость движения точки приложения Pi Piи- силы инерции от действия силы (Piui) - угол между силой и скоростью. Используя данную теорему получим где uВ- скорость движения т.В Q - общий вес балансира с уравновешивающим грузом L - расстояние от центра тяжести балансира до оси качения Li - радиус центра массы QP - вес кривошипного совместно с уравновешивающим грузом atB - тангенциальное значение ускорения т.В. Анализ зависимости (1) показывает, что величина Т является: - величиной переменной - зависит от положения механизма - зависит от закона изменения силы Р0 (от скважины) - от величины скорости и ускорения т.В - от соотношения длин элементов СК - от веса элемента СК и уравновешивающих грузов Полученное выражение (1) можно представить по другому: , (2) где Т0 - тангенциальное усилие от действия силы Р0, т.е. от действия скважины Тб - тангенциальное усилие от веса балансира и уравновешивающего груза на нем Тi- тангенциальное усилие от действия инерционных сил, возникающих при движении балансира и уравновешивающего груза на нем Ткгр = Тр - тангенциальное усилие от кривошипа и уравновешивающего груза на нем. С другой стороны, Аливерзаде было показано, что выражение (1) и (2) можно достаточно точно представить в следующем виде где Аsin j - характеризует влияние статических сил Bsin2j - характеризует влияние динамических сил. В графическом виде имеем для неуравновешенного СК 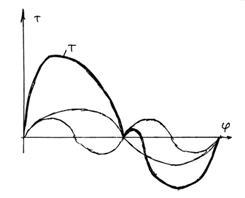 Анализ рисунка показывает, что тангенциальные усилия, а следовательно и нагрузка на двигатель изменяется крайне неравномерно для неуравновешенного СК. Так Т достигает максимума при начале хода вверх. При ходе вниз Т становится меньше 0, т.е. система начинает двигаться под действием силы тяжести ШК, т.е. при ходе вниз двигатель не производит работы, а наоборот поглощает энергию, т.е. работает в режиме генератора. Изменение знака Т плохо влияет на долговечность элементов СК и зубьев редуктора. В момент изменения знака от «+» к «-» происходит «перекидывание зубьев», т.е. редуктор стучит. Для того, чтобы избежать вредные явления применяют уравновешивание СК. Уравновешивание позволяет уменьшить значение Тмах , загрузить двигатель при ходе вниз, Уменьшить зоны где Т<0. С другой стороны, у уравновешенного СК Т=var , это приводит к неравномерному износу зубьев редуктора. С другой стороны, анализ (2) показывает, что тангенциальную Т можно уменьшить, уменьшив Тi . В свою очередь, Тi больше ,чем больше масса балансира, балансирного груза и ускорение балансира, поэтому, при больших числах качания стараются не применять балансирного уравновешивания. Балансирное уравновешивание не рекомендуется при большой грузоподъемности СК. В этом случае лучше применять кривошипное уравновешивание. Кривошипное уравновешивание не дает появлению инерционных сил, т.к. кривошипный груз вращается равномерно с постоянной угловой скоростью. Выбор мощности двигателя СК. Электродвигатель СК должен обеспечивать следующие условия: - двигатель должен быть рассчитан на круглогодичную работу, на открытом воздухе, при изменении в большом диапазоне температур и влажности - Двигатель должен иметь повышенный момент, т.к. в процессе вывода на рабочий режим ему приходится преодолевать большие инерционные нагрузки, возникающие при разгоне с большими массами и преодолевать большие перегрузки, которые могут возникнуть при эксплуатации установки - двигатель должен быть малочувствителен к падению напряжения в промысловой сети - мощность электродвигателя можно определить несколькими способами 1. по упрощенной зависимости 2. по формуле Ефремова Д.Е. Данные формулы не учитывают форму кривой крутящего момента на кривошипном валу, которая сильно влияет на потребную мощность Мкр=Тr Возникает вопрос: какую же величину Т брать для расчета мощности. Опыт показал: - если Тмах , то двигатель будет не дозагружен - если Тср то двигатель будет перегружен. Исходя из данных рассуждений берут среднеквадратичное значение тангенциального усилия Т. в свою очередь Подставляем и имеем Данная формула является наиболее точной. 33.Станок-качалка цепным приводом (конструкция «ТатНИПИнефть»). Регулирование числа качаний. Привод цепной скважинного штангового насоса ПЦ80-6,1 |