|
|
Четыре тенденции мировой промышленности
Вращающиеся трансформаторы (ВТ). Принцип действия, особенности конструкции, схемы включения, основные характеристики. Симметрирование. СКВТ, линейные ВТ, ВТ- построители. Область применения.
Враща́ющийся трансформа́тор — электрическая микромашина переменного тока (информационная электрическая машина)[1], резольвер (англ. Resolver_(electrical)), предназначенная для преобразования угла поворота в электрическое напряжение, амплитуда которого пропорциональна или является функцией (чаще всего, синус или косинус) угла или самому углу.
Применение
Вращающиеся трансформаторы применяются в аналого-цифровых преобразователях, системах передачи угла высокой точности, в качестве датчиков обратной связи в следящих системах, бортовой аппаратуре.
Принцип действия, особенности конструкции
Вращающиеся трансформаторы являются двухобмоточными на статоре (в основном) или многополюсными электрическими машинами. По конструкции аналогичны синхронным электродвигателям с возбуждаемым переменным током ротором. В зависимости от угловой ориентации магнитного поля ротора относительно взаимно перпендикулярным по магнитному потоку обмоток статора в обмотках статора наводятся ЭДС, амплитуда и фаза которых зависит от угла поворота ротора относительно статора. Эти электрические сигналы однозначно, в пределах одного оборота ротора, характеризуют угол поворота ротора.
Конструктивно ротор и статор набираются из листов электротехнической стали с обмотками из изолированного провода. Питание обмотки ротора осуществляется через щёточные контактные кольца.
Вращающиеся трансформаторы подразделяются на контактные и бесконтактные, с ограниченным и неограниченным углом поворота ротора.
Для систем точного отсчёта и синхронно-следящих систем применяются дисковые приёмники и датчики — индуктосины[2], состоящие из плоских статора и ротора, многослойные обмотки которых выполнены в виде печатных проводников (обмотка ротора однофазная, статора — двухфазная).
https://ru.wikipedia.org/wiki/%D0%92%D1%80%D0%B0%D1%89%D0%B0%D1%8E%D1%89%D0%B8%D0%B9%D1%81%D1%8F_%D1%82%D1%80%D0%B0%D0%BD%D1%81%D1%84%D0%BE%D1%80%D0%BC%D0%B0%D1%82%D0%BE%D1%80
Схемы включения вращающихся трансформаторов
http://www.mtomd.info/archives/2681
Симметрирование ВТ.
Поскольку выходное напряжение вращающихся трансформаторов должно строго подчиняться закону синуса или косинуса угла поворота ротора, то приходится прибегать к так называемому симметрированию, т.е. устранению погрешности от поперечной реакции выходных обмоток путем компенсации этой реакции.
При первичном симметрировании вращающегося трансформатора используется квадратурная обмотка В2, которая замыкается на внешнее сопротивление ZвнВ2. Витки этой обмотки на эквивалентной схеме (рис. 4.7а) и “поперечные витки” роторной обмотки С представляют собой трансформатор, первичной обмоткой которого является обмотка С, а вторичной – обмотка В2. Ток Iс, протекая по “поперечным виткам” w2эф.cosΘ обмотки С, создает магнитный поток ФВ2, сцепленный с обмоткой В2. В ней индуктируется трансформаторная ЭДС и течет ток IВ2. Значение результирующего поперечного потока Фq определяется геометрической суммой потоков ФВ2 и Фqc обеих обмоток. При малом значении ZвнВ2 режим трансформатора близок к короткому замыканию и взаимное размагничивающее действие обеих обмоток настолько велико, что значение результирующего поперечного потока Фq стремится к нулю при любом значении сопротивления нагрузки Zнс. Можно доказать, что влияние поперечной реакции исчезает полностью, если включить в цепь обмотки В2 сопротивление ZвнВ2= ZвнВ1, где ZвнВ1- внешнее сопротивление источника питания. Если ВТ подключен к выводам мощного источника питания, выходное сопротивление которого близко к нулю, то условием первичного симметрирования является ZвнВ2=0. Как видно, условие симметрирования от сопротивления нагрузки не зависит.
При вторичном симметрировании вращающегося трансформатора, обмотка С которого подключена к приемнику с входным сопротивлением Zнс, включается соответствующее сопротивление Zик и в цепь второй выходной обмотки К. Из эквивалентной схемы (рис. 4.7б) видно, что токи Ic и Iк, протекая по “поперечным виткам” w2эф.sinΘ, создают поперечные потоки Фqc и Фqк, направленные в противоположенные стороны, т.е. взаимно ослабляющие друг друга. Для полной компенсации поперечного потока (Фq=0) необходимо равенство поперечных потоков Фqc и Фqк, т.е. должно соблюдаться равенство ЭДС “поперечных витков” Icw2эф.cos Θ=Iкw2эф.sin Θ.
Нетрудно доказать, что это равенство справедливо только при
Zнс + Zс= Zнк + Zк (4.16)
При соблюдении условия симметрирования выходные напряжения на основании (4.5) и (4.6) можно записать в виде
Úc= КuÚ1sin Θ, Úк= Кu Ú1cos Θ, (4.17)
где коэффициент трансформации по напряжению в комплексной форме Кu= Кuеjφ.
Точный расчет значения и фазы выходного напряжения может быть выполнен по эквивалентным схемам.
Тахогенераторы (постоянного и переменного тока). Способы возбуждения, основные характеристики. Уравнения динамики, особенности конструкций и применения.
Тахогенератор постоянного тока
Тахогенератор постоянного тока представляет собой коллекторную машину с возбуждением либо от постоянных магнитов (встречаются чаще), либо от обмотки возбуждения (встречаются реже), располагаемых на ее статоре. Измерительная ЭДС наводится на обмотку ротора тахогенератора, и оказывается прямо пропорциональна угловой скорости вращения ротора, по сути — скорости изменения магнитного потока, в точном соответствии с законом электромагнитной индукции.
Так или иначе, выходным сигналом у тахогенератора постоянного тока является напряжение, что создает трудности с точным преобразованием напряжение-скорость, ведь магнитный поток подмагничивания зависит от температуры магнитов, от электрического сопротивления в месте контакта щеток с коллектором (которое со временем изменяется), наконец - от размагничивания постоянных магнитов с течением времени.
Тем не менее, в некоторых случаях тахогенераторы постоянного тока оказываются удобны формой представления выходного сигнала, а также закономерным явлением смены полярности данного сигнала в соответствии с изменением направления вращения вала.
Тахогенераторы постоянного тока характеризуются «коэффициентом преобразования» St, который выражает отношение снимаемого напряжения Uout к соответствующей данному напряжению частоте вращения Frot. Этот параметр дается в технической документации на тахогенератор, и измеряется в милливольтах, умноженных на обороты в минуту. Зная данный параметр и выходное напряжение с тахогенератора, можно вычислить текущую частоту по формуле:
Асинхронный тахогенератор переменного тока
Асинхронные тахогенераторы переменного тока похожи по устройству на асинхронные двигатели с короткозамкнутым ротором. Ротор здесь изготавливается в виде полого цилиндра (обычно медного или алюминиевого), а статор содержит две обмотки, расположенные под прямым углом друг к другу. Одна из обмоток статора — обмотка возбуждения, вторая — выходная. На обмотку возбуждения подается переменный ток с определенной амплитудой и частотой, а выходная обмотка присоединяется к измерительному прибору.
Когда короткозамкнутый ротор вращается, он периодически нарушает изначальную ортогональность магнитных потоков двух обмоток, в результате искажения картины магнитных полей, в выходной обмотке периодически наводится ЭДС. Если же ротор неподвижен, то магнитный поток обмотки возбуждения не искажается, и в выходной обмотке ЭДС не наводится. Здесь величина генерируемой ЭДС пропорциональна частоте вращения вала.
Поскольку подаваемый на обмотку возбуждения ток имеет собственную частоту, отличную от частоты вращения вала, такой тахогенератор именуется асинхронным. Кроме прочего, данная конструкция позволяет по фазе выходного сигнала судить о направлении вращения ротора, - при смене направления вращения фаза переворачивается.
Синхронный тахогенератор переменного тока
Синхронные тахогенераторы представляют собой бесколлекторные машины переменного тока. Намагниченность ротора создается постоянным магнитом, на статоре же присутствуют одна или более обмоток. В данном случае и амплитуда выходного сигнала, и его частота, - будут пропорциональны частоте вращения вала. Поэтому данные о скорости можно измерять как по значению амплитуды (детектирование по амплитуде), так и непосредственно по частоте (детектирование по частоте). Однако направление вращения по выходному сигналу синхронного тахогенератора не определить.
Ротор синхронного тахогенератора переменного тока может быть выполнен в виде многополюсного магнита, и на один оборот вала давать в выходном сигнале несколько импульсов подряд. Такие тахогенераторы, наравне с асинхронными, отличаются более длительным сроком службы, поскольку в них нет щеточно-коллекторного узла, склонного к механическому износу.
http://electricalschool.info/spravochnik/maschiny/2112-tahogeneratory-vidy-ustroystvo-i-princip-raboty.html
Уравнения динамики
Таким образом, если входным параметром является угол поворота вала, то тахогенератор представляет собой инерционное (реальное) дифференцирующее звено, уравнение динамики которого имеет вид
к <4- | и _ кк
К + К Ш К + К &
и Н с/ п
  
https://studref.com/311516/tehnika/tahogeneratory_postoyannogo_toka
Акселерометры. Конструкция, принцип действия. Маятниковый акселерометр, поплавковый акселерометр, схемы включения, уравнения динамики. Акселерометр с дискретным выходом. Поплавковый датчик углового ускорения. Основные погрешности акселерометров с дискретным выходом. Обработка информации с акселерометров с дискретным выходом.
Акселеро́метр (лат. accelero — ускоряю и др.-греч. μετρέω «измеряю») — прибор, измеряющий проекцию кажущегося ускорения (разности между истинным ускорением объекта и гравитационным ускорением). Как правило, акселерометр представляет собой чувствительную массу, закреплённую в упругом подвесе. Отклонение массы от её первоначального положения при наличии кажущегося ускорения несёт информацию о величине этого ускорения.
По конструктивному исполнению акселерометры подразделяются на однокомпонентные, двухкомпонентные, трёхкомпонентные. Соответственно, они позволяют измерять проекции кажущегося ускорения на одну, две и три оси.
Датчики ускорения и скорости, гигроскопический акселерометр. Гигроскопический датчик углового ускорения.
Датчики ускорения
Датчик ускорения (другое название – акселерометр) измеряет ускорение или в соответствии со вторым законом Ньютона силу, вызывающую ускорение инерционной массы. В системе курсовой устойчивости датчик ускорения измеряет силы, действующие на автомобиль и стремящиеся изменить заданную водителем траекторию движения. Датчик ускорения используется, как правило, совместно с датчиком угловой скорости.
Кроме системы динамической стабилизации датчик ускорения применяется в других автомобильных системах: системе пассивной безопасности (датчики удара), адаптивной подвеске, системе защиты пешеходов, системе контроля давления в шинах, системе адаптивного освещения, охранной сигнализации. Используемые в системах датчики различаются величиной измеряемого ускорения и способом измерения.
Конструкция датчика ускорения объединяет два параллельных конденсатора, включающих две фиксированные обкладки и одну общую подвижную обкладку, находящуюся между ними. Ускорение, действующее на датчик, изменяет расстояние между обкладками и, тем самым, изменяет емкость конденсаторов. По изменению емкости конденсаторов система распознает направление и величину, действующего на автомобиль ускорения.
http://systemsauto.ru/active/acceleration-sensor.html
Датчики скорости
Датчик скорости (датчик скорости автомобиля, ДСА) — чувствительный элемент электронной системы измерения скорости транспортных средств; контактный или бесконтактный датчик, измеряющий угловую скорость вала в коробке передач или в редукторе ведущего моста, и передающий результаты измерений на контроллер измерения скорости автомобиля или на спидометр.
Датчики скорости могут входить в состав различных систем современного транспортного средства:
Спидометра — для измерения и индикации текущей скорости движения и пройденного расстояния (с помощью одометра);
Системы впрыска, зажигания и других систем двигателя — для коррекции режимов работы силового агрегата в зависимости от скорости движения автомобиля и ее изменений (при ускорениях и торможениях);
Активных систем безопасности и сигнализации — для коррекции скорости и траектории движения автомобиля на различных режимах, предупреждения о потенциально опасных ситуациях, и т.д.;
В некоторых автомобилях — гидроусилителя руля и систем комфорта.
Датчики скорости делятся на две большие группы:
С непосредственным приводом от вала, или контактные;
Бесконтактные.
https://www.autoopt.ru/articles/products/53530691#:
:text=%D0%94%D0%B0%D1%82%D1%87%D0%B8%D0%BA%20%D1%81%D0%BA%D0%BE%D1%80%D0%BE%D1%81%D1%82%D0%B8%20(%D0%B4%D0%B0%D1%82%D1%87%D0%B8%D0%BA%20%D1%81%D0%BA%D0%BE%D1%80%D0%BE%D1%81%D1%82%D0%B8%20%D0%B0%D0%B2%D1%82%D0%BE%D0%BC%D0%BE%D0%B1%D0%B8%D0%BB%D1%8F,%D1%80%D0%B5%D0%B7%D1%83%D0%BB%D1%8C%D1%82%D0%B0%D1%82%D1%8B%20%D0%B8%D0%B7%D0%BC%D0%B5%D1%80%D0%B5%D0%BD%D0%B8%D0%B9%20%D0%BD%D0%B0%20%D0%BA%D0%BE%D0%BD%D1%82%D1%80%D0%BE%D0%BB%D0%BB%D0%B5%D1%80%20%D0%B8%D0%B7%D0%BC%D0%B5%D1%80%D0%B5%D0%BD%D0%B8%D1%8F
Гигроскопический датчик углового ускорения.
Гироскопический датчик угловой скорости представляет собой гироскоп с двумя степенями свободы. При этом движение гироскопа относительно оси подвеса рамки ограничено упругой связью с корпусом прибора. Такой датчик угловой скорости условно можно отнести к приборам первого поколения. К более совершенным приборам относятся поплавковые приборы (второе поколение), приборы, созданные на новых физических принципах (третье поколение) – динамически настраиваемые, осцилляторные, лазерные и др.
Принцип работы прибора заключается в следующем. При вращении ЛА относительно оси OY1 с угловой скоростью y1 относительно оси OX возникает гироскопический момент M г H . Гироскопический момент стремится совместить кратчайшим путем вектор кинетического момента H с вектором угловой скорости y1 . В результате этого гироузел начнет поворачиваться относительно оси подвеса рамы (оси OX). При повороте гироузла начинает деформироваться пружина 5 и создавать противодействующий момент Мпр . При равенстве Мпр=Мг гироузел будет находиться в уравновешенном состоянии. Этому состоянию будет соответствовать поворот гироузла на угол . С потенциометрического преобразователя в систему управления поступит сигнал, пропорциональный измеряемой угловой скорости y1. рассматриваемый датчик угловой скорости выполнен по разомкнутой схеме. Поэтому его структурная схема представляет собой последовательное соединение двух звеньев – чувствительного элемента (гироскопа) и преобразующего элемента (потенциометра).
Элементы коммутации силовых цепей электроприводов. Элементы защиты силовых цепей. Типовые схемы пуска и торможения электродвигателей. Типовые схемы защиты электропривода.
Защита, блокировки и сигнализация в электроприводах
Для обеспечения эффективной защиты примняются следующие виды защит
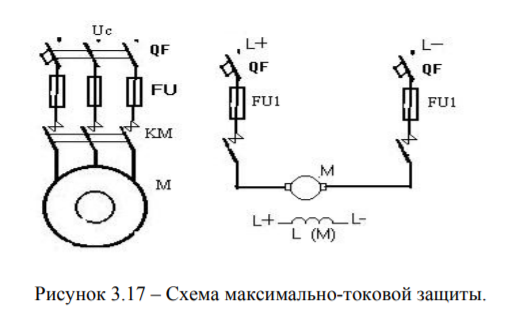
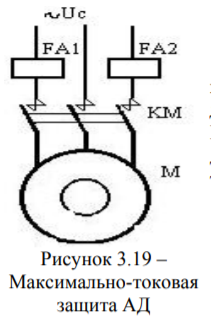
Аппараты максимальной токовой защиты - плавкие предохранители, реле максимального тока, автоматические переключатели.
Нулевая защита -от значительного снижения напряжения сети - обеспечивает отключения двигателя
Тепловая защита - отключает двигатель от источника питания, если вследствие протекания по его цепям повышенных токов имеет место более высокий нагрев его обмоток.
Минимально-токовая защита применяется с двигателями постоянного тока и синхронными двигателями для защиты от обрыва их цепей возбуждения.
Специальные виды защит - от перенапяжения на обмотке возбуждения двигателя пост. тока, от повышения напряжения в системе "преобразователь-двигатель", от превышения скорости ЭП, от затянувшегося пуска синхронных двигателей, путевая защита, обеспечивает отключение привода при достижении исполнительным органом крайних положений, защита синхронности синхронных двигателей и ряд других.
Электрические блокировки в системах привода служат для обеспечения заданной последовательности операций при его управлении, предотвращения нештатных и аваийных ситуаций, ошибок оператора и т.п.
Сигнализация в системах управлния может быть световой (сигнальные лампы, табло), звуковой (сирена, звонок), визуальной (указательные реле, измерительные приборы).
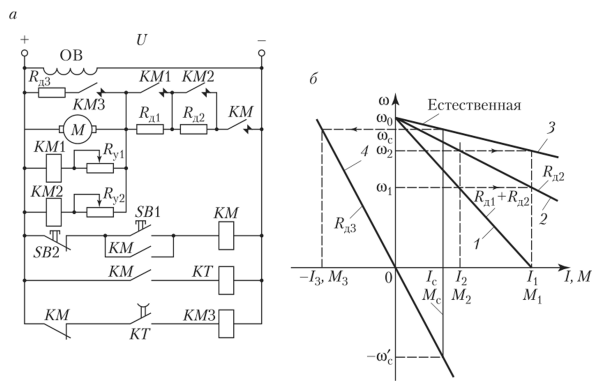
Схема пуска двигателя по принципу ЭДС и динамического торможения по принципу времени (а) и характеристики двигателя (б)
https://studref.com/354824/stroitelstvo/tipovye_uzly_shemy_upravleniya_elektroprivodov_dvigatelyami_postoyannogo_toka
Типовые схемы защиты электропривода


https://web.kpi.kharkov.ua/auts/wp-content/uploads/sites/67/2017/02/EMCS_Kachanov_lectures.pdf
Электрические аппараты ручного и дистанционного управления.
Электрический аппараты - электротехнические устройства, предназначенные для управления потоками энергии и информации, а также режимами работы, контроля и защиты технических и электротехнических систем и их компонентов.
Одним из основных признаков классификации является их рабочее напряжение, по которому они делятся на аппараты низкого (< 1000 В) и высокого напряжения (>1000 В).
Первые выполняют функцию коммутации и защиты цепей и устройств и регулирования параметров технических объектов. Аппараты высокого напряжения подразделяют на коммутационные (выключатели, разъединители), измерительные, компенсирующие (шунтрирующие реакторы УРШ, шунт - устройство позволяющее электрическому току протекать в обход), комплектные распределительные устройства.
По своему исполнению аппараты подразделяются на электромеханические, статические и гибридные. Также они подразделяются по значению рабочих токов и роду тока, частоте рабочего напряжения. К аппаратам ручного управления относятся командные маломощные устройства - кнопки, ключи управления, командоаппараты, командоконтроллеры, с помощью которых осуществляется коммутация цепей, магнитные пускатели - аппараты для пуска, останова и реверса асинхронных двигателей.
Автоматические выключатели - аппараты для нечастой коммутации цепей и их автоматической защиты при авариях. По принципу действия подразделяют на электромагнитные, тепловые и полупроводниковые. Также они имеют разное назначение, уровень номинальных токов, набор защит и т.п.
Контакторы - аппарат для частых коммутаций силовых цепей, с дистанционным управлением.
Различаются по роду тока, цепи, количеству главных контактов (полюсов), роду тока цепи катушки, номинальному току и напряжению коммутируемых цепей, конструктивному и сполнению и др.
|
|
|
 Скачать 1.89 Mb.
Скачать 1.89 Mb.