Четыре тенденции мировой промышленности
 Скачать 1.89 Mb. Скачать 1.89 Mb.
|

§ 3.5. Основные параметры и характеристики шаговых двигателейСпецифика конструкции ШД и многообразие режимов их работы вызывают необходимость оценивать эти двигатели по следующим параметрам: частоте собственных круговых колебаний; электромагнитным постоянным времени; коэффициенту внутреннего демпфирования и характеристикам – предельным механическим и предельным динамическим. Частота собственных круговых колебаний – это угловая частота колебаний ротора около устойчивого положения при отсутствии момента нагрузки О Период собственных круговых колебаний, равный 1/w0, может служить внутренним эталоном времени. Действительно, момент инерции Jопределяет инерционность двигателя и механизма, амплитуда максимального синхронизирующего момента Mmaxдает характеристику ШД как преобразователю энергии, число пар полюсов p определяет степень электромеханической редукции угла поворота и скорости вращения. Отношение Mmax/Jдает теоретически предельное ускорение ротора шагового двигателя. Электромагнитная постоянная времени обмоток управления Tэм = L/R характеризует скорость протекания электромагнитных переходных процессов. Часто для уменьшения Тэм последовательно с обмоткой управления включают добавочное сопротивление. Уменьшать постоянную времени необходимо потому, что чем она больше, тем до меньшего значения нарастает ток за время импульса напряжения, меньше становится синхронизирующий момент, а, следовательно, и допустимый момент сопротивления. Коэффициент внутреннего демпфирования о  пределяется отношением амплитуды потокосцепления ротора с фазой обмотки статора к ее активному сопротивлению. Этот параметр относится только к ШД с активным ротором, поскольку его физический смысл заключается в образовании электромагнитного тормозного момента, вызванного взаимодействием поля ротора с током статора, наведенным этим полем и замыкающимся по цепи статор-источник тока. При этом механическая энергия колеблющегося ротора превращается в электрическую энергию с последующим рассеиванием ее в теплоту в активных сопротивлениях обмоток статора. пределяется отношением амплитуды потокосцепления ротора с фазой обмотки статора к ее активному сопротивлению. Этот параметр относится только к ШД с активным ротором, поскольку его физический смысл заключается в образовании электромагнитного тормозного момента, вызванного взаимодействием поля ротора с током статора, наведенным этим полем и замыкающимся по цепи статор-источник тока. При этом механическая энергия колеблющегося ротора превращается в электрическую энергию с последующим рассеиванием ее в теплоту в активных сопротивлениях обмоток статора.Предельная механическая характеристика – это зависимость допустимого момента сопротивления от частоты управляющих импульсов в установившемся режиме работы (рис.3.7). С ростом частоты сказывается запаздывание в нарастании тока, обусловленное индуктивностью обмоток. При некоторой предельной частоте момент двигателя становится равным нулю. 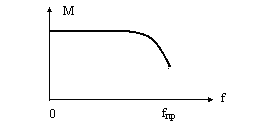 Рис. 3.7. Механическая характеристика ШДъ Предельная динамическая характеристика – зависимость частоты приемистости от момента сопротивления и момента инерции нагрузки. Такие характеристики называются предельными динамическими характеристиками пуска. Существуют также предельные динамические характеристики реверса и торможения. Линейные двигатели. Конструкция, принцип действия и область применения. Линейные двигатели. Конструкция, принцип действия и область применения. Что такое линейные двигатели? Линейный двигатель является вариантом привода, который отличается от ротационного двигателя: В отличие от ротационной машины линейный двигатель не создает вращательного движения у приводимого объекта, а перемещает его прямолинейно или вдоль криволинейной траектории. Линейный двигатель применяется в тех случаях, когда динамики, развиваемой ротационным серводвигателем, недостаточно и когда вместо этого нужно реализовать прямое поступательное движение (линейное движение). Так бывает, например, когда требуется непосредственный привод (линейные двигатели) или при точных процессах перемещения (линейные цилиндры). Как работает линейный двигатель? Принцип действия линейных двигателей выводится из принципа действия ротационных двигателей. В отличие от ротационных приводов у линейного двигателя часто перемещается активная часть, через которую идет ток, тогда как электрически пассивная часть неподвижна. При этом „электрически пассивная“ означает, что магнитное поле, как правило, создается постоянными магнитами, которые можно составлять в ряд произвольным образом. Реактивные силы должны поглощаться станиной машины или установкой. В то время как ротационным двигателям нужны передающие элементы (ремни, цепи и т. п.), чтобы из вращательного движения опосредованно получить поступательное, линейные приводы позволяют реализовать движение и тяговые усилия непосредственно. Поэтому линейные двигатели еще называют прямыми (непосредственными) приводами. Линейные двигатели могут развивать очень большие ускорения (до 6 g) и скорости перемещения до 13 м/с (48 км/ч). Поэтому они особенно хорошо подходят для применения в станках, системах позиционирования, манипуляторах и обрабатывающих центрах. https://www.sew-eurodrive.ru/produkty/dvigateli/prjamolinejnoe_dvizhenie/prjamolinejnoe_dvizhenie.html область применения. . Они часто используются для исследований гиперскоростных столкновений, а также, гипотетически, могут использоваться в специальных устройствах, таких, как оружие или пусковые установки космических кораблей. Линейные двигатели широко используются также в приводах подачи металлорежущих станков и в робототехнике. Для повышения точности позиционирования часто используются линейные датчики положения. https://ru.wikipedia.org/wiki/%D0%9B%D0%B8%D0%BD%D0%B5%D0%B9%D0%BD%D1%8B%D0%B9_%D0%B4%D0%B2%D0%B8%D0%B3%D0%B0%D1%82%D0%B5%D0%BB%D1%8C Конструкции 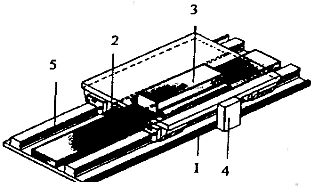 Рис. 1. Конструкция линейного однокоординатного двигателя. Применяются несколько вариантов конструкций линейного асинхронного двигателя. Одна из них показана на рис. 1. Здесь вторичный элемент (2) - полоса, соединенный с рабочим органом, перемещается по направляющим 1 под действием бегущего электромагнитного поля, создаваемого статором 3. Такая конструкция удобна для компоновки с рабочей машинной, однако, она сопряжена со значительными потоками рассеяния поля статора, вследствие чего cosφ двигателя будет низким. 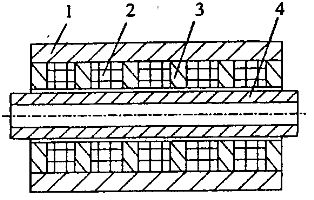 Рис.2. Линейный двигатель цилиндрической конструкции Для увеличения электромагнитной связи между статором и вторичным элементом, последний размещают в прорезь между двумя статорами, либо конструкция двигателя выполняется в виде цилиндра (см. рис. 2). В этом случае статор двигателя представляет собой трубку (1), внутри которой расположены цилиндрические наборные катушки (2), являющиеся обмоткой статора. Между катушками размещены ферромагнитные шайбы 3, являющиеся частью магнитопровода. Вторичный элемент - шток трубчатой формы также выполнен из ферромагнитного материала Энергетика электропривода. Основы выбора электродвигателей по мощности. Баланс мощностей и энергетические характеристики электропривода. Расчет потребляемой энергии в установившемся и переходном режимах. Выбор двигателей. Выбор электродвигателей к применяемым машинам состоит в удовлетворении ряда требований потребителя, практически это перебор возможных вариантов: по роду тока и напряжения, конструктивному исполнению, уровню вибрации и шума, мощности и режиму работы. Для обоснованного выбора электродвигателя по мощности необходимо знать характер изменения нагрузки двигателя во времени. С этой целью для машин, работающих в циклическом режиме, обычно строится нагрузочная диаграмма Мс = f(t),представляющая собой зависимость нагрузки электропривода от времени в течение рабочего цикла. Основным условием для обеспечения надежной работы электродвигателя в течение всего срока эксплуатации является требование, чтобы температура изоляции обмоток не превышала допустимого значения. Определение температуры нагрева двигателя и сравнение ее с допустимой довольно трудоемкий процесс, поэтому пользуются косвенными методами. Дополнительным условием является необходимость того, чтобы перегрузочная способность была достаточной для устойчивой работы электропривода в период максимальной нагрузки или аварийного снижения напряжения. На практике применяется метод эквивалентных величин, основанный на том, что переменную нагрузку заменяют постоянной эквивалентной Мэкв, при которой двигатель в течение длительного времени выделял бы такое же количество тепла, что и при действительной переменной нагрузке. Определение эквивалентных величин для заданного режима производится аналитически. При ступенчатом графике нагрузки Iэкв = √∑I2n tn / tц ; Мэкв = √∑М2n tn / tц ; Рэкв = √∑Р2n tn / tц ; Двигатель выбран правильно, если выполнено условие IЭКВ ≤ IН ; МЭКВ ≤ МН; РЭКВ ≤ РН. Выбранный двигатель должен быть проверен на перегрузочную способность Мmax ≤ 0,85 λmax Мн, где Мmax — наибольшее значение момента на нагрузочной диаграмме; 0,85 — коэффициент, учитывающий возможное снижение напряжения в сети; λmax — коэффициент перегрузки двигателя. Метод эквивалентного тока применяется для выбора мощности двигателя любого типа. Метод эквивалентного момента не применим для двигателей последовательного и смешанного возбуждения, так как между моментом и мощностью нет линейной зависимости. Определение мощности по Рэкв ограничивается двигателями параллельного возбуждения и асинхронными двигателями с незначительными колебаниями частоты вращения. При выборе двигателя работающего в повторно-кратковременном режима, найденное значение Мэкв и Рэкв приводят к стандартным значениям ПВ Мн = Мэкв√ПВфакт / ПВст; Рн = Рэкв√ПВфакт / ПВст, Если фактическое значение ПВ% более 60% надо выбирать двигатель, рассчитанный на длительный режим работы Общие требования к датчикам, их основные характеристики и классификация.Параметрические датчики. Потенциометрические, емкостные и индукционные измерители рассогласования. Конструкция, принцип действия, схемы включения, область применения и основные параметры. Основные требования следующие: 1) отсутствие воздействия на функционирование организма человека; 2) необходимые чувствительность и точность; 3) высокая перегрузочная способность (отношение предельно допустимого значения входной величины к номинальному ее значению); 4) устойчивость к химическим и биологическим воздействиям измеряемой и окружающей сред; 5) направленность действия (малое влияние нагрузки в выходной цепи датчика на режим входной цепи); 6) малая чувствительность к неизмеряемым параметрам и компонентам полей (электрических, магнитных, гравитационных, радиационных и др.); 7) унифицированность и взаимозаменяемость; 8) малая масса и габаритные размеры; 9) экономичность и технологичность производства. Типы датчиков Есть и основная группа. Она разделена на шесть основных направлений: Температура. Инфракрасное излучение. Ультрафиолет. Сенсор. Приближение, движение. Ультразвук. В каждую группу могут входить подразделы, если технология даже частично используется в составе конкретного устройства. 1 Датчики температуры Это одна из основных групп. Классификация датчиков температуры объединяет все устройства, имеющие способность проводить оценку параметров исходя из нагрева или остывания конкретного типа вещества либо материала. Это устройство собирает информацию о температуре от источника и преобразует ее в форму, понятную для другого оборудования или человека. Лучшая иллюстрация датчика температуры - ртуть в стеклянном термометре. Ртуть в стекле расширяется и сжимается в зависимости от изменений температуры. Наружная температура является исходным элементом для измерения показателя. Положение ртути наблюдает зритель, чтобы измерить параметр. Существует два основных типа датчиков температуры: 1.Контактные датчики. Этот тип устройств требует прямого физического контакта с объектом или носителем. Они контролируют температуру твердых веществ, жидкостей и газов в широком диапазоне температур. 2.Бесконтактные датчики. Этот тип датчиков не требует какого-либо физического контакта с измеряемым объектом или носителем. Они контролируют неотражающие твердые вещества и жидкости, но бесполезны для газов из-за их естественной прозрачности. Эти приборы используют закон Планка для измерения температуры. Этот закон касается тепла, излучаемого источником для измерения контрольного показателя. 2. ИК-датчик Это устройство излучает или обнаруживает инфракрасное излучение для определения конкретной фазы в окружающей среде. Как правило, тепловое излучение испускается всеми объектами в инфракрасном спектре. Этот датчик обнаруживает тип источника, который не виден человеческим глазом. Основная идея состоит в том, чтобы использовать инфракрасные светодиоды для передачи световых волн на объект. Другой ИК-диод того же типа должен использоваться для обнаружения отраженной волны от объекта. 3. УФ-датчик Эти датчики измеряют интенсивность или мощность падающего ультрафиолетового излучения. Форма электромагнитного излучения имеет большую длину волны, чем рентгеновское излучение, но все же короче, чем видимое излучение. 4. Сенсорный датчик Это еще одна большая группа устройств. Классификация датчиков давления применяется для проведения оценки внешних параметров, отвечающих за появление дополнительных характеристик при действии определенного объекта либо вещества. Датчик касания действует как переменный резистор в соответствии с местом, где он подключается. Сенсорный датчик состоит из: Полностью проводящее вещество, такое как медь. Изолированный промежуточный материал, такой как пена или пластик. Частично проводящий материал. При этом строгого разделения нет. Классификация датчиков давления устанавливается посредством выбора конкретного сенсора, который и оценивает появляющееся напряжение внутри либо снаружи изучаемого объекта. 5. Датчик приближения Все чаще в современных транспортных средствах используют эту технологию. Классификация электрических датчиков с использованием световых и сенсорных модулей набирает популярность у автомобильных производителей. Датчик приближения обнаруживает наличие объектов, которые находятся почти без каких-либо точек соприкосновения. Поскольку нет контакта между модулями и воспринимаемым объектом и отсутствуют механические детали, эти устройства имеют длительный срок службы и высокую надежность. 6. Ультразвуковые датчики Ультразвуковой датчик используется для обнаружения присутствия объекта. Это достигается за счет излучения ультразвуковых волн от головки устройства и последующего приема отраженного ультразвукового сигнала от соответствующего объекта. Это помогает в обнаружении положения, присутствия и движения объектов. Поскольку ультразвуковые датчики полагаются на звук, а не на свет при обнаружении, они широко используются для измерения уровня воды, медицинских процедур сканирования и в автомобильной промышленности. Ультразвуковые волны могут обнаружить невидимые объекты, такие как прозрачные пленки, стеклянные бутылки, пластиковые бутылки и листовое стекло, с помощью своих отражающих датчиков. Цифровые датчики линейного и углового положения скорости, принцип действия, особенности конструкции, основные характеристики. . Цифровой датчик скорости обладает большей точностью по сравнению с тахогенераторами. Он состоит из двух основных частей: импульсн ого преобразователя скорости (ИП) и кодового преобразователя (КП). Импульсный преобразователь ИП преобразует угловую скорость вала в импульсы напряжения частотой f, пропорциональной скорости вращения вала. ИП может быть выполнен на основе кодового диска с окнами, расположенными на двух концентрических дорожках (рис. 8.16а). Две дорожки используются для того, чтобы определить направление вращения диска (вала). Окна внутренней дорожки сдвинуты на определенный небольшой угол по отношению к окнам внешней дорожки, как показано на рис. 8.16а. 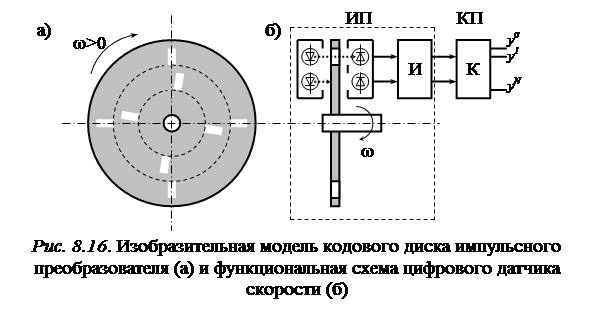 Когда диск вращается с некоторой угловой скоростью ω, излучение от источников (светодиодов) через окна дорожек периодически попадает на фотодиоды (рис. 8.16б). При этом проводимость фотодиодов увеличивается. По сигналам с фотодиодов в блоке формирования импульсов И вырабатываются импульсы частотой  , ,где n - количество окон на дорожке (на рис. 8.19а четыре окна на дорожке). Длительность τ импульса напряжения UH , формируемого от окна наружной дорожки, и импульса UB от окна внутренней дорожки тем меньше, чем больше скорость ω. Принцип формирования выходных сигналов Uω>0 и Uω<0 блоком И в зависимости от направления вращения кодового диска иллюстрируется на рис. 8.17. 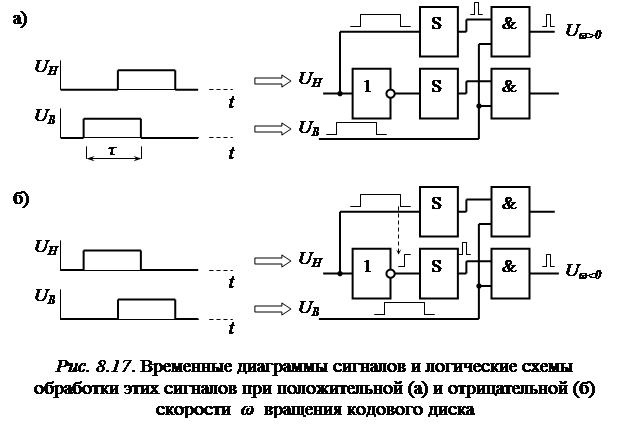 В блоке формирования импульсов И предусматривается одновибратор S, который генерирует на выходе одиночный импульс малой длительности τS(τS<<τ). Запускается одновибратор передним фронтом входного импульса. Выходной сигнал импульсного преобразователя ИП снимается с одного из двух его выходов в зависимости от направления вращения кодового диска. Импульсы частотой fИ длительностью τS поступают из ИП в кодовый преобразователь. Кодовый преобразователь КП (см. рис. 8.16б) – счетчик импульсов - суммирует импульсы ИП за период времени Т (T>>1/fИ) и формирует с периодичностью 1/Т цифровой код yN … y1 y0 суммарного количества импульсов  . (8.7) . (8.7)Величина nT характеризует среднее значение скорости ω на интервале времени Т. Погрешность измерения скорости определяется зависимостью δω=1/nT , (8.8) так как младшему разряду y0 КП соответствует один импульс. Повышение точности цифрового датчика скорости достигается путем увеличения количества n окон на каждой дорожке кодового диска (реально n >>4) и путем увеличения интервала времени Т суммирования импульсов. Однако чрезмерное увеличение Т приводит к росту отклонения среднего значения скорости, определяемого числом yN … y1 y0 , от мгновенного значения ω . Из выражений (8.8) и (8.7) также следует, что погрешность δω возрастает при малых скоростях ω . Поэтому для цифрового измерения малых значений ω применяют другой способ формирования цифрового кода – подсчитывается количество создаваемых высокочастотным генератором опорных импульсов, которые умещаются на интервале между двумя соседними импульсами на выходе импульсного преобразователя. Этот способ дает погрешность, возрастающую с увеличением скорости ω. |