Четыре тенденции мировой промышленности
 Скачать 1.89 Mb. Скачать 1.89 Mb.
|

|
Цифро-аналоговые системы управления. Цифровые системы управления. Микроконтроллеры.Принципы построения АСУ электроприводами. Цифро-аналоговые системы строятся по структуре подчиненного регулирования параметров, в которой основной ( внешний) контур управления выполняется цифровым, а подчиненный ( внутренний) - аналоговым. Цифровые устройства обеспечивают высокую точность регулирования и облегчают процесс настройки и работы благодаря точному измерению и индикации регулируемой величины - скорости. Аналоговые устройства являются выходными на исполнительную часть электропривода и обеспечивают хорошее качество переходных процессов. Поэтому основные различия в структурах ЦРС определяются аппаратной реализацией устройств, осуществляющих формирование пропорциональной, интегральной, дифференциальной составляющих закона регулирования и их комбинаций. Для аналого-цифровых и цифро-аналоговых систем требуются прецизионные источники питания с высокой температурной стабилизацией, что достаточно хорошо обеспечивается современными стабилитронами. Построение цифро-аналоговых систем регулирования скорости электроприводов по принципу подчиненного регулирования параметров позволяет использовать все преимущества подобных аналоговых систем, а также унифицировать цифровые узлы этих систем. При проектировании цифро-аналоговой системы немаловажным становится вопрос рационального выбора структуры системы с точки зрения сокращения объема счетчика цифрового интегратора. На базе рассмотренных цифро-аналоговых систем регулирования скорости индивидуальных электроприводов могут выполняться системы регулирования соотношения скоростей и группового управления многодвигательными электроприводами различных производственных механизмов. В рассматриваемой цифро-аналоговой системе ПИ-регулятор тока и П - регулятор частоты вращения выполнены на аналоговых элементах. Интегральный регулятор выполнен цифровым с аналоговым выходом. Для регулирования положения используются цифро-аналоговые системы управления, функциональная схема одной из них приведена на рис. 10.12. Схема содержит: аналоговую часть системы с элементами, как и при регулировании скорости ( см. рис. 10.11, а), с добавлением задатчика интенсивности нарастания скорости SV и аналоговой части регулятора положения AQ и цифровую, в которую входят: SGZ - устройство ввода задания положения; A W - арифметическое устройство; UZV - преобразователь кода в напряжение; BQZ - многоразрядный цифровой датчик положения; UZZ - преобразователь кода числа положения механизма в параллельный двоичный код. Цифровые системы управления В настоящее время широкое применение находят цифровые системы управления. Использование в этих системах цифровых вычислительных устройств обеспечивает реализацию достаточно сложных алгоритмов (законов) управления, а также высокую точность вычислений [7]. Цифровые САУ относятся к классу дискретных систем, в которых квантование сигнала осуществляется одновременно по времени и по уровню. При синтезе цифровых САУ можно использовать либо цифровую вычислительную машину, либо отдельные цифровые устройства в виде сумматоров, интеграторов и т.д. В зависимости от способа включения ЭВМ цифровые САУ могут быть трех типов: - с ЭВМ, включенной вне замкнутого контура управления; в этом случае ЭВМ служит для формирования на основании наблюдаемого процесса y(t) оптимального задающего воздействия на входе управляемой системы (УС): 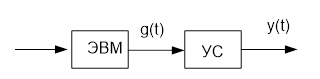 - с ЭВМ в замкнутом контуре управления; при этом улучшения динамических свойств САУ достигают благодаря возможности формирования практически любого алгоритма управления и изменения его в процессе работы; точность такой САУ ограничивается непрерывным сравнивающим устройством, включенным в цепь управления до ЭВМ: 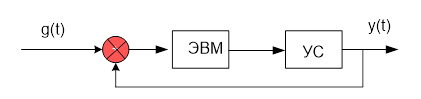 - с ЭВМ, в которой происходит сравнение задающего воздействия g(t) с выходным сигналом y(t). Такая САУ обладает всеми качествами предыдущей системы и к тому же является более точной за счет увеличения разрешающей способности цифрового сравнивающего устройства. С точки зрения структуры она охватывает обе предыдущие системы:  Выбор конкретного типа ЭВМ определяется в первую очередь теми функциями, которые САУ следует выполнять. Это может быть обработка поступающей информации, которая требует вычислительных или логических операций, улучшение динамических свойств системы, операции оптимизации по некоторым статическим или динамическим параметрам, операции контроля и т.д. Теоретической базой для аналитических исследований цифровых САУ может служить теория дискретныз систем. Если время замыкания ключа мало по сравнению с Т и постоянными времени непрерывной части системы, а сигнал на входе ключа е = const в замкнутом состоянии, то последовательность модулированных импульсов на входе ключа можно заменить последовательностью Значение каждой Сигналы в импульсных системах обычно представляются дискретными (решетчатыми) функциями. При исследовании динамических свойств САУ в первую очередь необходимо определить ее передаточные функции. Рассмотрим сначала передаточные функции импульсных систем. Передаточная функция разомкнутой импульсной системы – это отношение изображений (в соответствии с дискретным преобразованием Лапласа) выходного сигнала к входному сигналу при нулевых начальных условиях, т.е. Аналогично определяется эта передаточная функция в соответствии с z – преобразованием: Для определения передаточной функции W(z) по известной передаточной функции приведенной непрерывной части САУ W(s) необходимо сначала с помощью обратного преобразования Лапласа найти весовую функцию непрерывной части системы Затем по этой функции определить соответствующую ей дискретную весовую функцию Передаточная функция вычислительной машины – это отношение изображений выходного сигнала к входному, которые взяты в безразмерной (цифровой) форме: где  которое соответствует линейному алгоритму ее работы. Из уравнения следует, что настоящее значение выходного сигнала определяется предыдущими его значениями и настоящими и предыдущими значениями входного сигнала. При синтезе и анализе цифровых САУ применяются частотные передаточные функции и частотные характеристики. Анализ качества цифровых САУ выполняется аналогично анализу качества дискретных САУ. https://studizba.com/lectures/1-avtomatizaciya/40-osnovy-teorii-upravleniya/619-56-cifrovye-sistemy-upravleniya.html Рассмотренные в предыдущем разделе пособия аналоговые системы управления обладают рядом недостатков. Отметим основные из них. 1. Нестабильность параметров. При изменении внешних воздействий, особенно таких, как температура, влажность, вибрация, давление изменяются параметры аналоговых усилителей, фильтров, интеграторов и других элементов. Это приводит к изменению основных показателей качества системы управления. 2. Сложность централизованного управления несколькими объектами. Этот недостаток связан с проблемой точной передачи аналоговых сигналов на большие расстояния. При прохождении непрерывных сигналов по кабелям, проводам или радиоканалам они претерпевают искажения за счет ограниченности полосы пропускания канала связи, нелинейности приемопередающего тракта, а также из-за действия разнообразных помех. 3. Сложность серийного производства аналоговых систем управления. Микроконтро́ллер (англ. Micro Controller Unit, MCU) — микросхема, предназначенная для управления электронными устройствами. Типичный микроконтроллер сочетает на одном кристалле функции процессора и периферийных устройств, содержит ОЗУ и (или) ПЗУ. По сути, это однокристальный компьютер, способный выполнять относительно простые задачи. Отличается от микропроцессора интегрированными в микросхему устройствами ввода-вывода, таймерами и другими периферийными устройствами. Иерархический принцип построения АСУТП. В соответствии с этим принципом, АСУТП на верхнем уровне управления могут строиться из отдельных подсистем АСУТП, которые, в свою очередь, функционально делятся на два уровня — объектно-ориентированный (нижний) и инструментальный (верхний). Объектно-ориентированные подсистемы нижнего уровня, как правило, располагаются вблизи от объекта автоматизации и предназначены для решения следующих задач: • измерения параметров объекта в реальном времени; • управления объектом; • сбора данных измерений; • оперативной обработки данных, временного хранения, представления данных оператору и пересылки их в АСУ инструментального уровня. В состав объектно-ориентированных подсистем нижнего уровня могут входить СА и САУ. 3. Модульный принцип построения аппаратных средств АСУТП. Этот принцип предусматривает использование отдельных законченных модулей фиксированного назначения в качестве элементов АСУТП. Под модулем в АСУТП подразумевается отдельное устройство. В случае построения АСУТП на базе универсальной ЭВМ к модулям можно отнести аналого-цифровые и цифро-аналоговые преобразователи (АЦП и ЦАП), таймеры и т.д. Кроме того, в общем случае к ним же относятся ПЛК, УПУ, УМ, устройства связи и т.п., из которых система собирается, как «из кубиков» внутри шкафа автоматики. Такой подход обеспечивает легкую и быструю замену вышедшего из строя модуля системы на аналогичный, а также упрощает модернизацию системы. 4. Принцип программной управляемости модулей означает такую их схемную реализацию, которая даст возможность программным путем с помощью определенного набора команд управлять работой отдельных модулей. Программная управляемость элементов АСУТП позволяет оперативно изменять алгоритм работы системы в зависимости от требований оператора. 5. Принцип магистральной организации системы в основном доминирует в АСУТП. Он предусматривает наличие общей системы шин — магистрали, к которой подключаются отдельные функциональные элементы АСУ, в том числе ЭВМ. Магистральный принцип обеспечивает одинаковую доступность модулей для центрального элемента системы, т.е. ЭВМ. В системе с общей магистралью обращение к тому или иному модулю осуществляется путем его адресации, точно так же, как это делается в ЭВМ при обращении к ячейке ОЗУ. Наличие общей магистрали упрощает подключение новых модулей в систему и тем самым возможность расширения и гибкость АСУТП. Способы формирования статических механических характеристик электроприводов с помощью обратных связей по току, напряжению и скорости. Замкнутая система ТП-Д с отрицательной обратной связью по скорости ДПТ Система представлена на рис. 6.5: BR — датчик скорости — тахогенератор; t/тг = аз — сигнал обратной связи; у — коэффициент обратной связи по скорости. 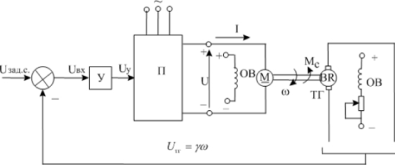 Рис. 6.5. Замкнутая система П-Д с отрицательной обратной связью по скорости Уравнения характеристик ДПТ независимого возбуждения в разомкнутой системе: Подставив t/вх = t/зад.с - усо; Uy = /Су t/вх получим уравнения характеристик в замкнутой системе: >=KyKnUx е,_С(1+^с) C(l+tfc)’ Ю=кукпих (6.2) С(1 + Ке) С2(1 + АГс) ’ где С = А/Фном, Кс = (уКуКп)1С — коэффициент усиления системы. Замкнутая система ТП-Д с отрицательной обратной связью по напряжению ДПТ Данная система изображена на рис. 6.7. Датчиком напряжения является потенциометр R, с которого снимается сигнал обратной связи по напряжению l/oc = aU, где а — коэффициент обратной связи. Тогда t/BX = изадл - U-U. В этом случае уравнения механической и электромеханической характеристик ДПТ имеют вид: С(1 + Ю С(1 + 7С) (6.3) MUi'+W+K')] с(і+а;) с2(і+ас) (6.4) где Кс = КуКпа. — общий коэффициент усиления системы. 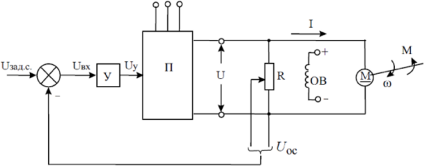 Рис. 6.7. Замкнутая система П-Д с отрицательной обратной связью по напряжению Замкнутая система ТП-Д с положительной обратной связью по току якоря Система показана на рис. 6.9. 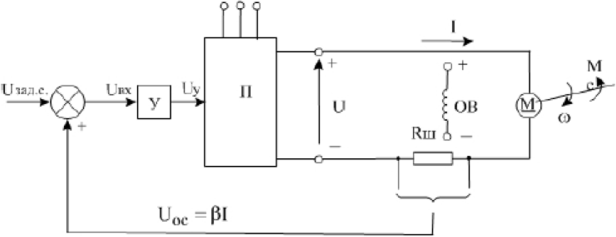 Рис. 6.9. Замкнутая система П-Д с положительной обратной связью по току датчик тока — шунт с сопротивлением Rm А(/ш = 1RW = І, т. е. падение напряжения на /?ш пропорционально току якоря. В результате сигнал обратной связи по току определяется как: t/o c = р/, где [З - коэффициент обратной связи по току, имеющий размерность (Ом). В качестве Rm можно использовать обмотку дополнительных полюсов или компенсационную обмотку двигателя. Сигнал на входе усилителя в данной системе определяется: UBK = U3aa,c+fil. Электромеханическая и механическая характеристики ДПТ в замкнутой системе описываются уравнениями: (6.5) (6.6) а-КЛи* RR. + Rn-KJ С с с с2 где Кс = Ом — общий коэффициент усиления системы. О) ы01 Анализ характеристик показывает, что при /?я + Rn = Кс — абсолютно жесткая характеристика (линия 1), при /?я + Rn < Кс — (линия 2) — жесткость характеристики положительна; при /?я + Rn > Кс — (линия 3) — жеткость характеристики отрицательна. Регулирование (ограничение) тока и момента в замкнутой системе ТП-Д с помощью нелинейной отрицательной обратной связи по току В схему, представленную на рис. 6.11, вводится узел токовой отсечки (УТО). Характеристика УТО U'oc = ДиоД До тех пор, пока сигнал обратной связи Uoc = р/ не более заданного опорного напряжения Uon, сигнал U'oc = 0. При Uoc > Uon появляется сигнал отрицательной обратной связи U'oc, который поступает на вход системы.  Рис. 6.11. Замкнутая система П-Д с нелинейной обратной связью по току Значение Uon определяется заданным током, с которого начинается регулирование (ток отсечки /отс). При6/оп = р/отс>р/, (/'ос=0. При Uoa = р/отс < pZ, U'oc Ф 0. Следовательно, Дсо3 < Дсор, жесткость характеристики ДПТ в замкнутой системе больше жесткости характеристик в разомкнутой системе. Поясним работу обратной связи по скорости. На рис. 6.6 представлены механические характеристики ДПТ в замкнутой системе (линии 2, 4, 5) при различных задающих сигналах і/зс1 > і/зс2 > і/зсз-Для сравнения представлена характеристика (линия 3) в разомкнутой системе. Изменение угловой скорости при разомкнутой и замкнутой системах определяется А®рв=/(Ля+Д1)/С, +)/С(1+кс)=дЮрв /(1+ Кс). Характеристика ДПТ при Кс со, Лоо —> 0 — абсолютно жесткая (линия 1). Однако на практике не применяется из-за ухудшения динамики электропривода. 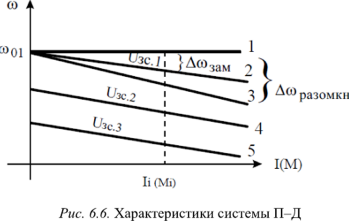 Если двигатель работает в установившемся режиме со скоростью со и увеличится Мс нагрузки, то скорость уменьшится и уменьшится сигнал обратной связи С7ТГ. Это вызовет увеличение Uy, следовательно, увеличится Епр, и скорость. Если момент нагрузки уменьшится, скорость увеличится и уменьшится UBX = изал - усо, Uy и Епр, после чего уменьшится скорость. Таким образом, осуществляется автоматическое поддержание скорости при изменении Мс нагрузки. Сравним жесткость характеристик в разомкнутой и замкнутой системах. Следовательно, характеристики ДПТ в замкнутой системе (рис. 6.8, линии 2, 4, 5) более жесткие, чем в разомкнутой (3). Предельная жесткость характеристик в замкнутой системе при Кс —> оо, тогда Дсо3 IRJC естественная характеристика (линия 1). 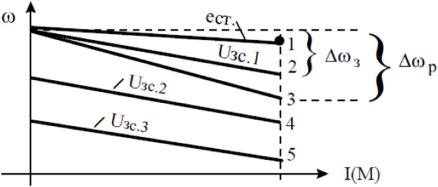 Рис. 6.8. Характеристики замкнутой системы П-Д Таким образом, обратная связь по напряжению при Кс —> оо обеспечивает полную компенсацию падения напряжения на внутреннем сопротивлении преобразователя /?п- Работа обратной связи по напряжению: при увеличении Мс на валу увеличивается ток якоря /, увеличивается внутреннее падение напряжения в преобразователе, при этом снижается U на якоре ДПТ. Тогда t/BX = С3ад.с - at/ увеличится и Uy увеличится, что приведет к росту ЭДС преобразователя и увеличению U на якоре двигателя. Происходит автоматическое регулирование ЭДС преобразователем. Датчик тока — шунт с сопротивлением Rm А(/ш = 1RW = І, т. е. падение напряжения на /?ш пропорционально току якоря. В результате сигнал обратной связи по току определяется как: t/o c = р/, где [З - коэффициент обратной связи по току, имеющий размерность (Ом). В качестве Rm можно использовать обмотку дополнительных полюсов или компенсационную обмотку двигателя. Сигнал на входе усилителя в данной системе определяется: UBK = U3aa,c+fil. Электромеханическая и механическая характеристики ДПТ в замкнутой системе описываются уравнениями: (6.5) (6.6) а-КЛи* RR. + Rn-KJ С с с с2 где Кс = Ом — общий коэффициент усиления системы. О) ы01 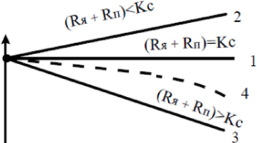 Рис. 6.10. Характеристики замкнутой системы П-Д КМ) На рис. 6.10 представлены характеристики ДПТ при различных коэффициентах усиления системы Кс. Анализ характеристик показывает, что при /Rя + Rn = Кс — абсолютно жесткая характеристика (линия 1), при /Rя + Rn < Кс — (линия 2) — жесткость характеристики положительна; при /Rя + Rn > Кс — (линия 3) — жеткость характеристики отрицательна. Реальные характеристики имеют нелинейный характер за счет непостоянства Кс (кривая 4). Поэтому такая обратная связь используется в совокупности с другими, например по напряжению. |