Четыре тенденции мировой промышленности
 Скачать 1.89 Mb. Скачать 1.89 Mb.
|

ВРАЩАЮЩИЙ МОМЕНТ СИНХРОННОГО ДВИГАТЕЛЯМагнитное поле ротора Ф, вращаясь, пересекает проводники статорной обмотки и индуцирует в них ЭДС. Эта ЭДС, как и в генераторе, работающем параллельно с сетью, совпадает по фазе с напряжением сети (см. рис. 6.23,1,я) при отсутствии механической нагрузки на двигатель. Величина ЭДС Е0, индуцируемой в статоре, зависит от величины магнитного потока ротора и может быть установлена произвольной посредством выбора соответствующей силы тока в обмотке возбуждения. Создадим на валу двигателя тормозной момент. Тогда частота вращения ротора начнет уменьшаться. Между осью полюсов стато- ора и осью полюсов ротора образуется некоторый угол 9 (рис. 6.26.1), 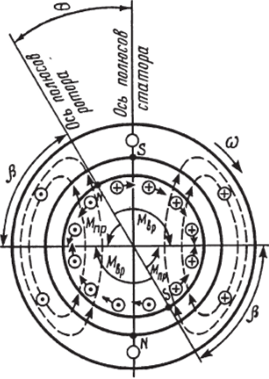 Рис. 6.26.1 и максимум ЭДС в каждой фазе статорной обмотки будет наступать позднее, т.е. вектор Е0 повернется относительно вектора напряжения йс на такой же угол в сторону запаздывания. Возникнет электромагнитный вращающий момент, действующий на ротор. Когда электромагнитный вращающий момент достигнет значения тормозного Мт, то возрастание утла 9 прекратится и ротор станет вращаться со скоростью поля (природа образования электромагнитного вращающего момента показана на рисунке 6.26.1). При наличии тормозного момента число проводников, на которые действуют электромагнитные силы по направлению вращения ротора и которые создают вращающий момент М^, преобладает над числом проводников (в пределе углов р), создающих противодействующий момент М„р. Электромагнитный момент синхронного двигателя имеет то же выражение, что и электромагнитный момент синхронного генератора: Однако следует напомнить, что в генераторе этот момент был противодействующим вращающему моменту, создаваемому первичным двигателем, а в синхронном двигателе он является вращаю- Щим (Л/,„). Магнитные потоки ротора и статора, взаимодействуя друг с другом, создают результирующий магнитный поток подобно тому, как это было в синхронном генераторе (см. рис. 6.19.3, 6.19.4). Этот поток индуцирует в статоре результирующую ЭДС Е, которая и уравновешивает напряжение сети Uc. Результирующий магнитный поток искажен, и ось, проходящая через середины полюсов на поверхности статора, смещена в сторону вращения поля относительно оси, проходящей через полюсы ротора, на угол 9. Результирующее магнитное поле машины показано на рисунке 6.26.2.  Рис. 6.26.2 Мощность и вращающий моментсинхронного двигателя. Активная мощность, потребляемая трехфазным синхронным двигателем из сети, равна утроенной фазной мощности Если пренебречь потерями, которые относительно малы, то активная потребляемая мощность равна электромагнитной мощности, т. е. мощности, передаваемой магнитным полем из статора в ротор Из треугольников Оса и асb векторной диаграммы на рис. 14.14, б следует, что отрезок Механический момент на валу двигателя (4.5) где Шаговые двигатели. Конструкция и принцип действия, область и особенности применения в ЭММС. Режим работы и характеристики шаговых двигателей. Синхронизирующий момент и статическая устойчивость. Примеры шаговых двигателей и их параметры. Шаговый двигатель (ШД) — бесщеточный механизм с несколькими обмотками и последовательной подачей напряжения на каждую из них. Первые экземпляры электрических моторов такого типа появились еще в 1830-х годах, и почти за 200 лет устройство претерпело значительных изменений. Ниже рассмотрим, что это за агрегат, какие бывают виды и особенности конструкции, на каком принципе работают, и где применяются. Отдельно разберем плюсы и минусы, тонкости подключения и управления, а также другие вопросы, касающиеся разновидности мотора. Что такое шаговый двигатель Шаговый двигатель — электромотор, где импульсное питание током приводит к перемещению роторной части на заданный угол. Относится к классу бесколлеркторных электромоторов постоянного тока. После его запуска создается наибольший момент при минимальной скорости, а сам двигатель показывает отличные характеристики даже в состоянии покоя. Управление осуществляется посредством дискретных импульсов, формируемых на драйвере мотора. Первые шаговые двигатели имели вид электромагнита, вращающего в момент включения храповое колесо. Каждое включение приводило к перемещению на одну позицию. За время эксплуатации моторы были существенно оптимизированы с позиции конструктивных и функциональных параметров. Сфера применения Шаговые двигатели получили широкое применение и устанавливаются во многих механизмах. Примеры: Периферийные устройства вычислительных машин. Станки с числовым программным управлением (ЧПУ): XY-столы, фрезерные станки, чертежные автоматы. Устройства компьютерной памяти. Оборудование для чтения оптических дисков. Перфоратор и считыватель ленты и т. д. Активное применение в машиностроении получили двухфазные шаговые электродвигатели гибридного типа. Также они используются в приводах разных машин и механизмов, которые работают в режиме «старт-стоп». Типы и конструктивные особенности Сегодня применяется несколько видов ШД, отличающихся по конструкции, типу обмоток, особенностям управления и иным параметрам. Рассмотрим каждую классификацию более подробно. По конструкции ротора Многие характеристики двигателя, касающиеся скорости вращения и режима работы, зависят от ротора. С этой позиции выделяется три вида устройства. Реактивный (синхронный). Особенность — отсутствие роторного магнита. Конструктивно изготавливается из специальных сплавов, позволяющих снизить индуктивные потери. Устройство имеет вид шестеренки с зубцами, а на полюсах статора подается напряжение со второй пары. Как результат, создается магнитная сила для перемещения ротора. По принципу действия реактивный шаговый агрегат имеет много общего с синхронным мотором, где поля ротора и статора вращаются в одном направлении. Двигатель с магнитами. В отличие от прошлого устройства подвижный элемент комплектуется постоянным магнитом с двумя и более полюсами. Ротор крутится, благодаря притягиванию и отталкиванию полюсов с помощью электрического поля в момент подачи разницы потенциалов на определенные обмотки. Смешанные. В гибридных устройствах совмещаются лучшие качества магнитных и реактивных моторов. В отличие от прошлых моделей угол и шаг здесь меньше. Конструктивно ротор оборудован постоянным магнитом, имеющим цилиндрическую форму. Внешне он имеет вид двух полюсов с круглым сечением, на поверхности которых находятся роторные зубцы. Такая особенность гарантирует хороший момент вращения и удерживания. Главные плюсы — максимальная плавность, точность и скорость перемещения. По типу обмоток Плавность функционирования шагового двигателя находится в прямой зависимости от числа обмоток, поэтому на этот фактор важно обращать особое внимание.  Многие ошибочно считают, что количество обмоток зависит от числа фаз. Это не так, ведь даже 2-фазный мотор может иметь четыре и более обмотки. Шаговые двигатели бывают: 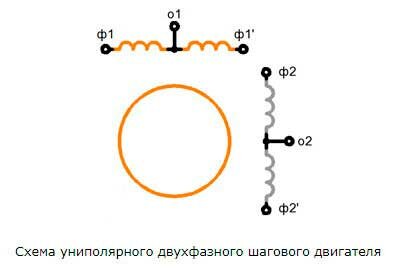 Униполярными. Особенность — наличие отпайки из средней точки, что позволяет с легкостью менять полюса. Минус состоит в применении части витков, поэтому уменьшается момент вращения. Для повышения мощности средний вывод подключать не рекомендуется. Конструктивно униполярные устройства содержат пять и шесть выводов. 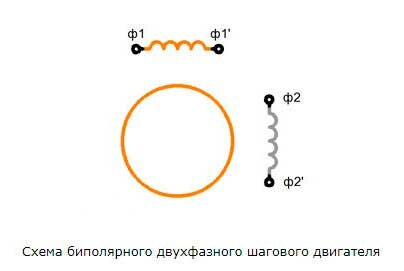 Биполярный. К этой группе относится шаговый двигатель, подключаемый к контроллеру через четыре отпайки. Обмотки могут объединятся в параллель или последовательно. Для изменения направления тока применяются так называемые чипы, обеспечивающие ручное управление. Достижение такого эффекта доступно с помощью Н-моста. Если сравнивать с униполярным видом, биполярный тип гарантирует тот же момент, но при меньших размерах.. 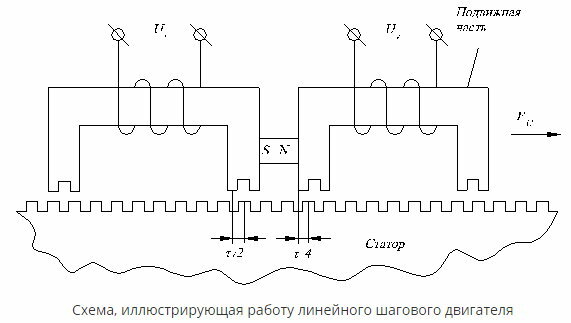 Линейные (актуаторы). Принцип действия построен на преобразовании вращательного движения в линейное. Иными словами, в них сочетается винтовая передача и ШД, объединенные в общем блоке. Шаговые двигатели с редуктором. Применяются в ситуации, когда необходимо получить максимальное усилие на валу электрического привода с минимальной скоростью вращения. В роли редуктора используется планетарный тип, оборудованный прямозубыми шестеренками с небольшим люфтом передачи. На рынке представлен большой выбор устройств, имеющих индивидуальные характеристики и подходящих для определенных сфер деятельности. Эти моменты необходимо учитывать при выборе модели. Принцип работы В зависимости от вида агрегата его конструктивные особенности могут отличаться, но общий принцип действия почти неизменный. Так, на статоре предусмотрены четыре обмотки, расположенные под 90-градусным углом. Как только на первую обмотку подается напряжение, ротор перемещается на указанный выше угол. При поступлении напряжения на вторую, третью и четвертую обмотку вал продолжает вращаться до прохождения полного круга. Далее процесс повторяется сначала. При желании изменить очередность вращения требуется подавать импульсы в обратном направлении. Для удобства пользователи могут управлять ШД и менять его характеристики с учетом особенностей использования. |