Четыре тенденции мировой промышленности
 Скачать 1.89 Mb. Скачать 1.89 Mb.
|

|
Трехфазные трансформаторы. Электрический трансформатор - это устройство, предназначенное для изменения величины напряжения в сети переменного тока. Принцип действия трансформаторов основан на явлении электромагнитной индукции. При подключении первичной обмотки к источнику переменного тока, в обмотках генерируется магнитное поле, которые взывает ЭДМ во вторичных обмотках. Данная ЭДС пропорциональна числу витков в первичных и вторичных обмотках. Отношение электродвижующей силы в первичной обомотке/вторичной называется коэффициентом трансформации. Основными элементами конструкции трансформатора являются первичные и вторичные обмотки и ферромагнитный магнитопровод (обычно замкнутого типа). Обмотки расположены на магнитопроводе и индуктивно связаны друг с другом. Использование магнитопровода позволяет саккумулировать большую часть магнитного поля внутри трансформатора, что повышает КПД устройства. Магнитопровод обычно состоит из набора металлических пластин, покрытых изоляцией, для предотвращения возникновения «паразитных» токов внутри магнитопровода. Зачастую часть вторичной обмотки служит часть первичной и наоборот. Данный тип трансформаторов называют автотрансформаторами. В этом случае концы первичных обмоток подключаются к сети переменного напряжения, а концы вторичной присоединяются к потребителям электроэнергии. Рисунок 1000000 – схема замещения Рисунок 10000010242 – энергетическая диаграмма Различают несколько режимов работы трансформатора, имеющего номинальную полную мощность S„ом = 51ном = • • номинальный режим, т. е. режим при номинальных значениях напряжения Ux - UlH0M и тока /, = /1ном первичной обмотки трансформатора; • • рабочий режим, при котором напряжение первичной обмотки близко к номинальному значению или равно ему: Ul« UlH0M, а ток /, меньше своего номинального значения /,ном или равен ему и определяется нагрузкой трансформатора, т. е. током /2; • • режим холостого хода, т. е. режим ненагруженного трансформатора, при котором цепь вторичной обмотки разомкнута (/2 = 0) или подключена к приемнику с большим сопротивлением нагрузки (например, к вольтметру); • • режим короткого замыкания трансформатора, при котором его вторичная обмотка коротко замкнута (?/, = 0) или подключена к приемнику с малым сопротивлением нагрузки (например, к амперметру). Режимы холостого хода и короткого замыкания специально создаются при испытании трансформатора. В режиме холостого хода (рис. 9.11) трансформатор превращается в катушку с магнитопроводом, к обмотке которой с числом витков w, подключен источник синусоидального напряжения. Поэтому векторная диаграмма трансформатора при холостом ходе (рис. 9.12) подобна векторной диаграмме катушки с магнитопроводом (см. рис. 8.7), отличаясь от нее некоторыми обозначениями и дополнительно построенным вектором ЭДС вторичной обмотки Ё2х. Опытом холостого хода называется испытание трансформатора при разомкнутой цепи вторичной обмотки и номинальном первичном напряжении Ulx = UlH0M. На основании этого опыта по показаниям измерительных приборов определяют коэффициент трансформации и мощность потерь в магнитопроводе трансформатора. Опыт холостого хода является обязательным при заводском испытании трансформатора. При номинальном первичном напряжении Ulx = ?/1ном ток холостого хода /1х составляет 2—8 % номинального первичного тока /1ном (тем меньше, чем больше номинальная полная мощность трансформатора), т. е. по (9.11) Ulx« Е1х. Кроме того, при разомкнутой цепи вторичной обмотки U2x = Е2х. Поэтому, измерив вольтметром первичное Ulx и вторичное U2x напряжения в режиме холостого хода, определяют коэффициент трансформации повышающего или понижающего трансформатора: Коэффициент трансформации указывается на щитке трансформатора в виде отношения напряжений высшего к низшему в режиме холостого хода, например «6000/230 В». Мощность потерь в трансформаторах в режиме холостого хода РХх складывается из мощности потерь в магнитопроводе, мощности потерь в проводах первичной обмотки (/?el/fx), а также мощности добавочных потерь (потери из-за вибрации листов стали в местах их стыков, в конструктивных деталях вследствие потока рассеяния и т. д.). При холостом ходе ток /1х«/1ном и мощность потерь в проводах ничтожна по сравнению с мощностью потерь в магнитопроводе (исключение составляют трансформаторы с номинальной полной мощностью меньше 1000 В - А). То же относится и к мощности добавочных потерь. Поэтому опыт холостого хода служит для определения мощности потерь в магнитопроводе трансформатора. Мощность потерь в трансформаторе в режиме холостого хода мала и составляет 0,3—1,4 % его номинальной полной мощности (тем меньше, чем больше номинальная полная мощность трансформатора). Тем не менее мощность потерь в маг- нитопроводе имеет важное практическое значение, так как силовые трансформаторы редко отключаются от первичной сети. Ток холостого хода /]х, как и ток катушки с магнитопроводом, состоит из реактивной /1рх и активной /1ах составляющих. В большинстве случаев активная составляющая /1а х меньше 10 % реактивной составляющей /1рх, и можно считать, что ток холостого хода отстает по фазе от первичного напряжения практически на угол Ф1х»я/2 (см. рис. 9.12). При ограниченных возможностях охлаждения важно знать, как изменится режим холостого хода трансформатора при изменении первичного напряжения. Зависимости 4х=/(*4) и 4=/(<4) называются характеристиками холостого хода трансформатора (рис. 9.13). Сначала при повышении первичного напряжения С71х от нулевого значения магнитопровод не насыщен и ток 4 увеличивается пропорционально напряжению; затем начинает сказываться насыщение магнитопровода, например при 4х>0,84ном, и ток холостого хода 4 быстро нарастает. Мощность потерь в магнитопро- воде при индукции больше 1 Тл пропорциональна квадрату амплитуды магнитного потока (8.11) и (8.12) и, учитывая (9.1) и Е1х» Ulx, квадрату действующего значения напряжения ?4- Для большинства силовых трансформаторов допустимый верхний предел длительного повышения первичного напряжения в режиме холостого хода равен 1,Ш1н0мСледует различать режим короткого замыкания в эксплуатационных условиях и опыт короткого замыкания. Первый представляет собой аварийный режим, так как трансформатор сильно нагревается и перегрев может вызвать его разрушение. Опытом короткого замыкания называется испытание трансформатора при короткозамкнутой цепи вторичной обмотки, пониженном первичном напряжении Z71kUlH0M и номинальном первичном токе /1к=/1ном- Этот опыт (рис. 9.14) служит для определения мощности потерь в проводах обмоток и треугольника внутреннего падения напряжений. Опыт короткого замыкания, как и опыт холостого хода, обязателен при заводских испытаниях. В режиме короткого замыкания (Ц, = 0) ЭДС Е2к, индуцируемая во вторичной обмотке (9.11), равна сумме напряжений на активном сопротивлении и индуктивном сопротивлении рассеяния вторичной обмотки: в то время как в рабочем режиме В опыте короткого замыкания действующее значение ЭДС Е2к составляет 2—5 % его значения в рабочем режиме. Пропорционально значению ЭДС уменьшается магнитный поток в магнитопроводе (9.1), а вместе с ним намагничивающий ток (9.4) и мощность потерь в магнитопроводе (8.11) и (8.12). Поэтому опыт короткого замыкания служит для определения мощности потерь в проводах первичной и вторичной обмоток: или, полагая малым ток намагничивания, Мощность потерь в трансформаторе в опыте короткого замыкания составляет 1—4 % его номинальной полной мощности (тем меньше, чем больше номинальная полная мощность трансформатора). Из опыта короткого замыкания определяют: • полное сопротивление короткого замыкания трансформатора • активное сопротивление короткого замыкания трансформатора На рис. 9.15, а и б построены треугольник сопротивлений и подобный ему треугольник внутреннего падения напряжений, стороны которого представляют в процентах номинального напряжения i7lH0M первичное напряжение в опыте короткого замыкания UlK и его активную и индуктивную составляющие: Рис. 9.14 Рис. 9.15 • индуктивное сопротивление короткого замыкания трансформатора Напряжение короткого замыкания ик является важным параметром трансформатора и указывается на его щитке. Оно определяет изменение вторичного напряжения нагруженного трансформатора (см. § 9.8). Напряжение короткого замыкания составляет 5—10 % номинального первичного напряжения и тем больше, чем выше номинальные напряжения обмоток трансформатора. Это объясняется тем, что с увеличением толщины изоляции проводов возрастают потокосцеп- ления рассеяния, а следовательно, и индуктивные сопротивления рассеяния Храс1 и Jpac2. Пренебрегая током холостого хода /1х в схеме замещения трансформатора на рис. 9.9 и определив параметры трансформатора RK и Хк из опыта короткого замыкания, получим упрощенную эквивалентную схему замещения трансформатора (рис. 9.16, а), для которой на рис. 9.16, б построена векторная диаграмма. Опыт короткого замыкания служит также контрольным опытом для определения коэффициента трансформации. При коротком замы- Рис. 9.16 кании в уравнении (9.5) составляющая /lxw, мала и ею можно пренебречь. Следовательно, коэффициенты трансформации повышающего и понижающего трансформаторов (9.13) равны: Исполнительные элементы приводов электромеханических и мехатронных систем. 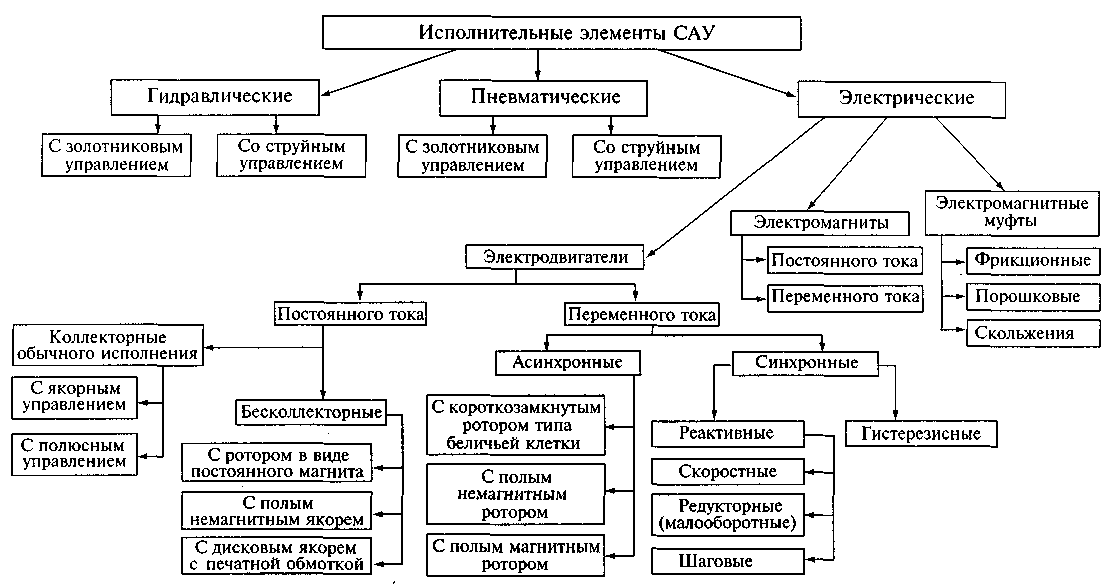 Двигатели постоянного тока. Конструкция. Способы включения. Уравнения ЭДС и моментов. Регулировочные, пусковые, рабочие характеристики. Принцип действия и устройство электродвигателя постоянного тока Сейчас невозможно представить нашу жизнь без электродвигателей. Они приводят в действие станки, бытовую технику и инструменты, поезда, трамваи и троллейбусы, компьютеры, игрушки и разные подвижные механизмы, устанавливаются на производственных станках, если частоту вращения рабочего вала требуется регулировать в широком диапазоне. Агрегаты для преобразования электрической энергии в механическую представлены множеством видов и моделей (синхронные, асинхронные, коллекторные и т.д.). Из этой статьи вы узнаете, что такое электродвигатель постоянного тока, его устройство и принцип действия. Устройство электродвигателя постоянного тока Теперь, когда вы знаете, как работает электродвигатель постоянного тока, пора ознакомиться с его конструкцией. Как и у других моделей, основу двигателя составляют статор (индуктор) – неподвижная часть, и якорь вкупе с щеточноколлекторным узлом – подвижная часть. Обе части разделены воздушным зазором. В состав статора входят станина, являющаяся элементом магнитной цепи, а также главные и добавочные полюса. Обмотки возбуждения, необходимые для создания магнитного поля, находятся на главных полюсах. Специальная обмотка, улучшающая условия коммутации, расположена на добавочных полюсах. Якорь представляет собой узел, состоящий из магнитной системы (она собрана из нескольких листов), набора обмоток (проводников), уложенных в пазы, и коллектора, который подводит постоянный ток к рабочей обмотке. Коллектор имеет вид цилиндра, собранного из изолированных медных пластин. Он насажен на вал двигателя и имеет выступы, к которым подходят концы секций обмотки якоря. Щетки снимают ток с коллектора, входя с ним в скользящий контакт. Удержание щеток в нужном положении и обеспечение их нажатия на коллектор с определенной силой осуществляется щеткодержателями. Многие модели двигателей оснащены вентилятором, задача которого – охлаждение агрегата и увеличение продолжительности рабочего периода.  Рисунок 12524 - Способы включения 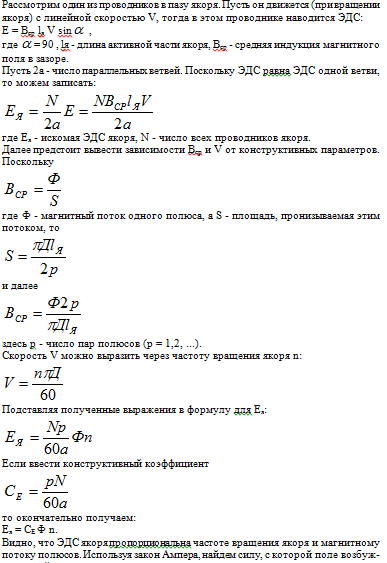 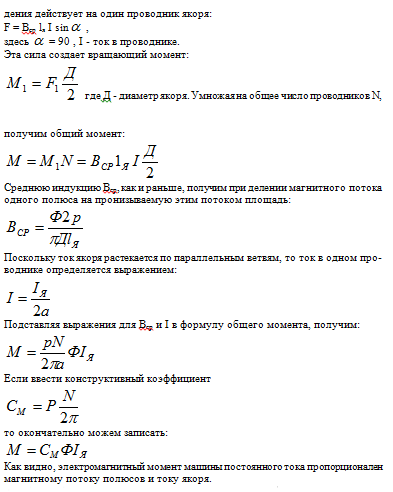 Двигатели постоянного тока.Способы регулирования скорости вращения. Передаточные функции. Особенности применения двигателей постоянного тока в ЭММС. Примеры исполнительных двигателей и их характеристики.  Из уравнения электромеханической характеристики двигателя постоянного тока независимого возбуждения следует, что возможны три способа регулирования его угловой скорости: 1) регулирование за счет изменения величины сопротивления реостата в цепи якоря, 2) регулирование за счет изменения потока возбуждения двигателя Ф, 3) регулирование за счет изменения подводимого к обмотке якоря двигателя напряжения U. Ток в цепи якоря Iя и момент М, развиваемый двигателем, зависят только от величины нагрузки на его валу.  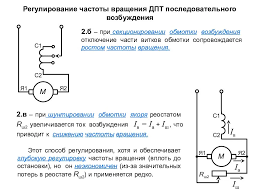 Так как передаточная функция представляет собой отношение изображений выходной и входной величин, то можно записать где kдв=1/kэм – коэффициент передачи двигателя. В зависимости от соотношения величин постоянных времени двигателя, вид его передаточной функции можно изменять. Так, если 4Тя>Тм, что встречается достаточно редко, двигатель описывается колебательным звеном. Чаще всего 4Тя<Тм и передаточную функцию можно представить в виде При анализе систем автоматического управления с двигателем постоянного тока часто пренебрегают электромагнитной постоянной, ввиду ее малости (Тя0), по сравнению с другими постоянными времени системы, и используют передаточную функцию вида Кроме того, если выходной величиной является не угловая скорость, а угол поворота вала двигателя, которые, как известно, связаны соотношением При решении многих технических задач оказывается возможным пренебречь временем разгона (переходным процессом) по сравнению с полным временем вращения вала, и тогда двигатель может быть описан идеальным интегрирующим звеном + Бесколлекторные двигатели постоянного тока. Конструкция и принципы действия. Достоинства и недостатки двигателей постоянного тока. Примеры исполнительных бесколлекторных двигателей постоянного тока. Бесколлекторный двигатель постоянного тока имеет на статоре трёхфазную обмотку, и постоянный магнит на роторе. Вращающееся магнитное поле создаётся обмоткой статора, при взаимодействии с которым магнитный ротор приходит в движение. Для создания вращающегося магнитного поля на обмотку статора подаётся система трёхфазных напряжений, которая может иметь различную форму и формируется различными способами. Формирование питающих напряжений (коммутация обмоток) для бесколлекторного двигателя постоянного тока производиться специализированными блоками электроники – контроллером двигателя. В простейшем случае обмотки попарно подключаются к источнику постоянного напряжения и по мере того как ротор поворачивается в направлении вектора магнитного поля обмотки статора производится подключение напряжения к другой паре обмоток. Вектор магнитного поля статора при этом занимает другое положение и вращение ротора продолжается. Для определения нужного момента подключения следующих обмоток используется датчик положения ротора, чаще других используются датчики Холла. Выпускаемые сейчас бесколлекторные двигатели могут иметь самую разную конструкцию. По исполнению статорной обмотки можно выделить двигатели с классической обмоткой, намотанной на стальной сердечник, и двигатели с полой цилиндрической обмоткой без стального сердечника. Классическая обмотка обладает значительно большей индуктивностью, чем полая цилиндрическая обмотка, и соответственно большей постоянной времени. Из-за этого с одной стороны, полая цилиндрическая обмотка допускает более динамичное изменение тока (а, следовательно, и момента), с другой стороны при работе от контроллера двигателя, использующего ШИМ-модуляцию невысокой частоты для сглаживания пульсаций тока, требуются фильтрующие дроссели большего номинала (а соответственно и большего размера). Кроме того, классическая обмотка, как правило, имеет заметно больший момент магнитной фиксации, а также меньший КПД, чем полая цилиндрическая обмотка. Ещё одно отличие, по которому разделяются различные модели двигателей – это взаимное расположение ротора и статора – существуют двигатели с внутренним ротором и двигатели с внешним ротором. Двигатели с внутренним ротором, как правило, имеют более высокие скорости и меньший момент инерции ротора, чем модели с внешним ротором. Благодаря этому двигатели с внутренним ротором имеют более высокую динамику. Двигатели с внешним ротором часто имеют несколько больший номинальный момент при том же наружном диаметре двигателя. Отличия от других типов двигателей Отличия от коллекторных ДПТ. Размещение обмотки на роторе позволило отказаться от щёток и коллектора и избавиться тем самым от подвижного электрического контакта, который значительно снижает надёжность ДПТ с постоянными магнитами. По этой же причине скорость у бесколлекторных двигателей, как правило, значительно выше, чем у ДПТ с постоянными магнитами. С одной стороны это позволяет увеличить удельную мощность бесколлекторного двигателя, с другой стороны не для всех применений такая высокая скорость является действительно необходимой Отличия от синхронных двигателей с постоянными магнитами. Синхронные двигатели с постоянными магнитами на роторе очень похожи на бесколлекторные ДПТ по конструкции, однако есть и ряд различий. Во-первых термин синхронный двигатель объединяет в себе много различных видов двигателей, часть из которых предназначены для непосредственной работы от стандартной сети переменного тока, другая часть (например синхронные серводвигатели) может работать только от преобразователей частоты (контроллеров двигателей). Бесколлекторные двигатели, хотя и имеют на статоре трёхфазную обмотку, не допускают непосредственную работу от сетевого напряжения, и обязательно требуют наличия соответствующего контроллера. Кроме того синхронные двигатели предполагают питание напряжением синусоидальной формы в то время как бесколлекторные двигатели допускают питание переменным напряжением ступенчатой формы (блочная коммутация) и даже предполагают его использование в номинальных режимах работы. Когда нужен бесколлекторный двигатель? Ответ на этот вопрос достаточно прост – в тех случаях, когда он имеет преимущество перед остальными типами двигателей. Так, например, практически невозможно обойтись без бесколлекторного двигателя в применениях, где требуются большие скорости вращения: свыше 10000 об/мин. Оправдано применение бесколлекторных двигателей также и в тех случаях, когда требуется высокий срок службы двигателя. В тех случаях, когда требуется применять сборку из двигателя с редуктором, однозначно оправдано применение низкоскоростных бесколлекторных двигателей (с большим числом полюсов). Высокоскоростные бесколлекторные двигатели в этом случае будут иметь скорость выше, чем предельно допустимая скорость редуктора, и по этой причине не будет возможности использовать их мощность полностью. Для применений, где требуется максимально простое управление двигателем (без использования контроллера двигателя) естественным выбором будет коллекторный ДПТ. С другой стороны, в условиях повышенной температуры или повышенной радиации проявляется слабое место бесколлекторных двигателей – датчики Холла. Стандартные модели датчиков Холла имеют ограниченную стойкость к радиации и диапазон рабочих температур. Если в подобном применении всё же имеется необходимость использовать бесколлекторный двигатель, то неизбежными становятся заказные исполнения с заменой датчиков Холла на более стойкие к указанным факторам, что увеличивает цену двигателя и сроки поставки.  Асинхронные двигатели переменного тока. Конструкция, принцип действия. Однофазная, двухфазная, трехфазная обмотка статора. ЭДС и намагничивающая сила обмоток статора, пульсирующее и вращающиеся поля. Регулировочные и рабочие характеристики. Передаточная функция. Особенности применения асинхронных двигателей и их основные параметры Трехфазный асинхронный двигатель мало чем отличается от своих собратьев и состоит из двух основных частей – вращающейся и неподвижной, или другими словами ротора и статора. Располагаются они один в другом при этом, не касаясь друг друга. Между деталями имеется небольшой воздушный зазор от 0,5 до 2 миллиметров, в зависимости от конструкции двигателя. Схематическое строение Однако это не все детали. Давайте разберем строение более подробно. Статор – фактически главная рабочая часть, являющаяся мощным электромагнитом. Состоит он их сердечника, выполненного из тонколистовой технической стали, толщиной всего лишь 0,5 миллиметров, которая покрывается токоизоляционным лаком, и обмотки, сделанной из медной проволоки, которая также изолирована и располагается продольных пазах сердечника Строение статора прекрасно видно на представленной выше схеме, где показано, что сердечник собран из множества пластин совмещенных друг с другом. Цилиндр на валу снизу – это и есть ротор Ротор – данный элемент также состоит из сердечника, обмотка которого короткозамкнута (хотя бывает и другое строение), который располагается на валу. Сердечник этого элемента также представлена в виде шихтованной детали, однако сталь не покрывается лаком, так как ток, протекающий внутри, будет очень слабым, и естественной оксидной пленки будет вполне достаточно, чтобы ограничить вихревые токи. Вал мотора представляет собой центральную ось, вокруг которой и происходит вращение электромотора. С разных концов на этом элементе располагаются подшипники качения, за счет которых обороты происходят максимально плавно и легко. Сами подшипники запрессованы в боковые крышки, в которых имеются посадочные места под них. Совет! Подшипники должны сидеть очень плотно, при этом они должны быть отцентрованы, смазаны, легко вращаться, то есть быть исправными, иначе при высоких оборотах двигатель очень быстро выйдет из строя. На конце вала, противоположном приводу, располагается небольшая крыльчатка, которая при включенном двигателе выполняет функцию его охлаждения. Кстати, данный элемент тоже может стать причиной появления вибрации в двигателе, если его лопасти отломаются, что негативно сказывается на сроке службы агрегата. Пример разбитого вентилятора можно увидеть на фото выше. Идем по цепочке. Боковые крышки корпуса крепятся к станине, которая удерживает все вышеназванное вместе. Также любой двигатель имеет пусковую аппаратуру и силовые цепи, о чем мы подробнее поговорим немного позже. Принцип вращение электромагнитного поля 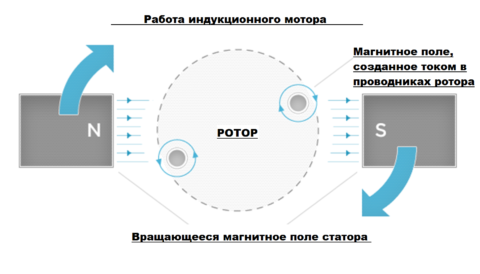 Электромагнитная индукция в моторах Главной особенностью любого электрического двигателя является то, что он способен переводить электрическую энергию в кинетическую, то есть механическую. При этом, разобрав его строение, вы можете увидеть, что никакого прямого или передаточного привода он не имеет. Как же тогда происходит вращение двигателя? Вся фишка в том, что обмотка статора способна создавать сильное вращающееся магнитное поле, которое увлекает за собой ротор, при включении мотора в электрическую сеть. Данное магнитное поле имеет определенную частоту вращения, которая прямопропорциональна частоте переменного тока, и имеет обратную пропорциональность числу пар полюсов обмотки. Назначение, устройство и принцип действия однофазных асинхронных двигателей Однофазные асинхронные двигатели - машины небольшой мощности, которые по конструктивному исполнению напоминают аналогичные трехфазные электродвигатели с короткозамкнутым ротором. Однофазные асинхронные двигатели отличаются от трехфазных двигателей устройством статора, где в пазах магнитопровода находится двухфазная обмотка, состоящая из основной, или рабочей, фазы с фазной зоной 120 эл. град и выводами к зажимам с обозначениями С1 и С2, и вспомогательной, или пусковой, фазы с фазной зоной 60 эл. град и выводами к зажимам с обозначениями В1 и В2 (рис. 1). Магнитные оси этих фаз обмотки смещены относительно друг друга па угол 0 = 90 эл. град. Одна рабочая фаза, присоединенная к питающей сети переменного напряжения, не может вызвать вращения ротора, так как ток ее возбуждает переменное магнитное поле с неподвижной осью симметрии, характеризуемое гармонически изменяющейся во времени магнитной индукцией. Сравнение технических характеристик однофазных и трехфазных асинхронных двигателей Однофазные асинхронные двигатели отличаются от аналогичных по номинальной мощности трехфазных машин пониженной кратностью начального пускового момента kп = Mп / Mном и повышенной кратностью пускового тока ki = Mi / Mном которые для однофазных электродвигателей с пусковой фазой обмотки статора, имеющей повышенное сопротивление постоянному току и. меньшую индуктивность, чем рабочая фаза, имеют значения kп - 1,0 - 1,5 и ki = 5 - 9. Пусковые характеристики однофазных асинхронных двигателей хуже аналогичных характеристик трехфазных асинхронных двигателей в связи с тем, что возбуждаемое при пуске однофазных машин с пусковой фазой обмотки статора эллиптическое вращающееся магнитное поле, эквивалентное двум неодинаковым круговым вращающимся магнитным полям - прямому и обратному, вызывает появление тормозного эффекта. Подбором параметров элементов электрических цепей рабочей и пусковой фаз обмотки статора можно обеспечить при пуске возбуждение кругового вращающегося магнитного поля, что возможно при фазосдвигающем элементе, выполненном в виде конденсатора соответствующей емкости. Так как разгон ротора вызывает изменение параметров цепей машины, вращающееся магнитное поле из кругового переходит в эллиптическое, ухудшая этим пусковые характеристики двигателя. Поэтому при скорости около 0,8 номинальной пусковую фазу обмотки статора электродвигателя отключают вручную или автоматически, в результате чего двигатель переходит на однофазный режим работы. Однофазные асинхронные двигатели с пусковым конденсатором имеют кратность начального пускового момента kп = 1,7 - 2,4 и кратность начального пускового тока ki = 3 - 5. Двухфазные асинхронные двигатели В двухфазных асинхронных двигателях обе фазы обмотки статора с фазными зонами по 90 эл. град являются рабочими. Они расположены в пазах магнитопровода статора так, что их магнитные оси образуют угол 90 эл. град. Эти фазы обмотки статора отличаются друг от друга не только числом витков, но и номинальными напряжениями и токами, хотя при номинальном режиме двигателя полные мощности их одинаковы. В одной из фаз обмотки статора постоянно находится конденсатор Ср (рис. 3, а), который в условиях номинального режима двигателя обеспечивает возбуждение кругового вращающегося магнитного поля. Емкость этого конденсатора определяют по формуле: Cр = I1sinφ1 / 2πfUn2 где I1 и φ1- соответственно ток и сдвиг фаз между напряжением и током цепи фазы обмотки статора без конденсатора при круговом вращающемся магнитном поле, I и U - соответственно частота переменного тока и напряжение питающей сети, n- коэффициент трансформации - отношение эффективных чисел витков фаз обмотки статора соответственно с конденсатором и без него, определяемое по формуле n = kоб2 w2 / kоб1 w1 где kоб2 и kоб1 - обмоточные коэффициенты соответствующих фаз обмотки статора с числом витков w2 и w1. Напряжение на зажимах конденсатора Uc, включенного последовательно с фазой обмотки статорадвухфазного асинхронного двигателя, при круговом вращающемся магнитном поле выше напряжения сети U и определяется так: Uc = U √1 + n2 Переход к нагрузке двигателя, отличной от номинальной, сопровождается изменением вращающегося магнитного поля, которое вместо кругового становится эллиптическим. Это ухудшает рабочие свойства двигателя, а при пуске снижает начальный пусковой момент до Мп < 0,3Mном, ограничивая этим применение двигателей с постоянно включенным конденсатором только в установках с легкими условиями пуска. Для повышения начального пускового момента параллельно рабочему конденсатору Ср включают пусковой конденсатор Сп (рис. 3, б), емкость которого намного больше емкости рабочего конденсатора и зависит от кратности начального пускового момента, которая может быть доведена до двух и более. После разгона ротора до скорости 0,6 - 0,7 номинальной пусковой конденсатор отключают для избежания перехода кругового вращающегося магнитного поля в эллиптическое, ухудшающее рабочие характеристики двигателя. Пусковой режим таких конденсаторных двигателей характеризуется такими показателями: kп = 1,7 - 2,4 и ki = 4 - 6. Конденсаторные двигатели отличаются лучшими энергетическими показателями, чем однофазные двигатели с пусковой фатой обмотки статора, я коэффициент мощности их, благодаря применению конденсаторов, выше, чем у трехфазных двигателей одинаковой мощности. 5.12. РАБОЧИЕ ХАРАКТЕРИСТИКИ АСИНХРОННОГО ДВИГАТЕЛЯ Эти характеристики снимаются экспериментально и представляют собой зависимость I1, М2, n2, cos, h от нагрузки на валу двигателя P2. Примерный вид характеристик приведен на рис. 5.12.1.  5.13. ПУСК, РЕГУЛИРОВАНИЕ ЧАСТОТЫ ВРАЩЕНИЯ И ТОРМОЖЕНИЕ АСИНХРОННОГО ДВИГАТЕЛЯ. На практике замечено, что ток, потребляемый обмоткой статора в первый момент пуска двигателя, очень большой. В ряде случаев он превышает номинальный ток в 6 - 10 раз. Такой нагрузки может не выдержать не только питающая сеть, но и сама обмотка статора. Поэтому для пуска крупных асинхронных двигателей применяют специальные устройства, снижающие пусковой ток. На рис. 5.13.1. показаны схемы пуска мощных двигателей с помощью реакторов и автотрансформатора. Принцип ограничения тока заключается в том, что к статорной обмотке двигателя на период пуска подводится пониженное напряжение. После разгона его дополнительные устройства от двигателя отключаются. Иногда для снижения напряжения, подаваемого в обмотки статора, изменяют схему переключения обмоток. Например, асинхронный двигатель нормально работает по схеме "треугольник". Если на период пуска его обмотки включить "звездой", то на каждую фазу придется напряжение в Двигатели с фазным ротором пускаются в работу с помощью дополнительных сопротивлений. Вводя дополнительные сопротивления в цепь ротора, добиваются ограничения пускового тока. Регулирование частоты вращения асинхронного двигателя определяется формулой: Здесь возможны три различных способа реализации: Первый заключается в изменении частоты тока f, подаваемого в обмотки двигателя. Этот способ позволяет осуществлять плавное регулирование частоты вращения двигателя. Регуляторы частоты тока пока еще очень дороги, поэтому они мало применяются. Второй способ связан с изменением пар полюсов p на статоре. Укладывая на статоре несколько обмоток, рассчитанных на различные числа пар полюсов (р=1,2,3,4), можно обеспечить различные частоты вращения магнитного поля (соответственно: 3000, 1500, 1000, 750 об/мин). Подключение к сети необходимой обмотки производится специальным переключателем. Этот способ регулирования ступенчатый, но в ряде металлообрабатывающих станков он нашел самое широкое применение (например, для привода продольно-строгального станка при рабочем и обратном ходе). Третий способ регулирования частоты вращения возможен лишь для двигателей с фазным ротором. Здесь изменение скольжения S достигается введением в цепь ротора регулировочных сопротивлений. Такие схемы широко используются на грузоподъемных кранах. К категории регулирования вращения вала двигателя относится так называемое реверсирование, т.е. изменение направления вращения на обратное. Осуществляется оно путем изменения порядка чередования фаз обмотки статора. На рис. 5.13.2. показана схема изменения направления вращения вала двигателя.  Торможение асинхронного двигателя может быть механическим и электрическим. К механическим относятся торможения муфтами, электромагнитными лентами, колодками и т.д. Иногда применяют электродинамическое торможение, когда после отключения двигателя от сети переменного тока в его обмотки подается постоянный ток. В этом случае постоянное магнитное поле заметно сокращает выбег ротора. Синхронные электродвигатели. Конструкция и принцип действия. Условия запуска и работы с синхронной скоростью. Вращающий момент. Основные характеристики. Особенностью работы двигателя является равенство скорости вращения ротора и скорости вращения магнитного потока. Поэтому скорость вала двигателя не зависит и не изменяется от величины подключаемой нагрузки. Это достигается за счет того, что индуктор синхронного электродвигателя является электромагнитом, в некоторых случаях постоянным магнитом. Количество пар полюсов ротора одинаково с числом пар полюсов у движущегося магнитного поля. Взаимное воздействие этих полюсов дает возможность выравнивания скорости ротора. На валу в этот момент может быть любая по величине нагрузка. Она не влияет на скорость вращения индуктора. Конструктивные особенности и принцип работы Основными составными частями синхронного электродвигателя являются: статор, который неподвижен, и ротор, иными словами называемый индуктором. Статор имеет другое название – якорь, но от этого его суть не меняется. Эти части двигателя разделены прослойкой воздуха. Между пазами заложена трехфазная обмотка, которая чаще всего имеет соединение по схеме звезды.  Когда двигатель после запуска начал работать, токи якоря образуют движущееся магнитное поле, его вращение дает пересечение поля индуктора. В итоге такой работы двух полей возникает энергия. Магнитное поле статора по своей сути является полем его реакции. В работе генераторов такую энергию получают с помощью индукторов. Полюсами являются электромагниты статора, работающие на постоянном токе. Статоры синхронных моторов могут выполняться по различным схемам: неявнополюсной, а также явнополюсной. Они отличаются положением полюсов. Для снижения магнитного сопротивления и оптимизации условий прохода магнитного поля используют сердечники из ферромагнитного материала. Они находятся в роторе и якоре. Производятся они из электротехнической стали, которая содержит большое количество кремния. Это дает возможность снизить вихревые токи и увеличить электрическое сопротивление стали. Синхронные электродвигатели имеют в своей основе принцип взаимодействия полюсов индуктора и статора. Во время пуска двигатель ускоряется до скорости вращения магнитного потока. Только при таком условии электродвигатель начинает действовать в синхронном режиме. При таком процессе магнитные поля образуют пересечение, возникает вход в синхронизацию. Долгое время для разгона мотора применяли отдельный пусковой двигатель. Его соединяли механическим путем с синхронным мотором. При запуске ротор мотора ускорялся и достигал синхронной скорости. Далее мотор самостоятельно втягивался в синхронное движение. При выборе мощности пускового мотора руководствовались 15% мощности от номинала разгоняемого двигателя. Этого резерва мощности было достаточно для запуска синхронного двигателя, даже при наличии небольшой нагрузки. Такой метод разгона более сложный, значительно повышает стоимость оборудования. В современных конструкциях синхронные электродвигатели не имеют такой схемы разгона. Применяют другую систему разгона. Реостатом замыкают обмотки индуктора по аналогии с асинхронным двигателем. Для запуска на ротор монтируют короткозамкнутую обмотку, являющуюся также и успокоительной обмоткой, которая предотвращает раскачивание ротора при синхронизации. При достижении ротором номинальной скорости, к индуктору подключают постоянный ток. Однако, для пуска моторов с постоянными магнитами не обойтись без применения пусковых внешних двигателей. В криогенных синхронных электродвигателях применяется обращенная конструкция. В ней якорь и индуктор размещены наоборот, индуктор находится на статоре, а якорь расположен на роторе. У таких машин возбуждающие обмотки состоят из сверхпроводимых материалов. Синхронные компенсаторы Они служат для компенсирования коэффициента мощности в электрической сети и стабилизации номинального значения напряжения в местах подключения нагрузок к двигателю. Нормальным режимом синхронного компенсатора является режим перевозбуждения в момент отдачи в электрическую сеть реактивной мощности. Такие компенсаторы еще называют генераторами реактивной мощности, так как они предназначены для выполнения такой же задачи, как батареи конденсаторов на подстанциях. Когда мощность нагрузок уменьшается, то часто необходимо действие синхронных компенсаторов в невозбужденном режиме при их потреблении реактивной мощности и индуктивного тока, потому что напряжение в сети старается увеличиться, а для его стабилизации на рабочем уровне нужно нагрузить сеть током индуктивности, который вызывает в сети снижение напряжения питания. Для таких целей синхронные компенсаторы обеспечиваются регулятором автоматического возбуждения. Регулятор изменяет ток возбуждения таким образом, что напряжение на компенсаторе не изменяется. Сфера применения Широкое использование электродвигателей асинхронного типа со значительными недогрузками делает работу станций и энергосистем сложнее, так как уменьшается коэффициент мощности системы, это ведет к незапланированным потерям, к их неполному использованию по активной мощности. В связи с этим появилась необходимость в использовании двигателей синхронного типа, особенно для приводов механизмов значительной мощности. Если сравнивать синхронные электродвигатели с асинхронными, то достоинством синхронных стала их работа коэффициентом мощности равном 1, благодаря действию возбуждения постоянным током. При этом они не расходуют реактивную мощность из питающей сети, а если работают с перевозбуждением, то даже отдают некоторую величину реактивной мощности для сети. Достоинства синхронных электродвигателей Синхронный двигатель несколько сложнее, чем асинхронный, но обладает рядом преимуществ, что позволяет применять его в ряде случаев вместо асинхронного. 1. Основным достоинством синхронного электродвигателя является возможность получения оптимального режима по реактивной энергии, который осуществляется путем автоматического регулирования тока возбуждения двигателя. Синхронный двигатель может работать, не потребляя и не отдавая реактивной энергии в сеть, при коэффициенте мощности (cos фи) равным единице.Если для предприятия необходима выработка реактивной энергии, то синхронный электродвигатель, работая с перевозбуждением, может отдавать ее в сеть. 2. Синхронные электродвигатели менее чувствительны к колебаниям напряжения сети, чем асинхронные электродвигатели. Их максимальный момент пропорционален напряжению сети, в то время как критический момент асинхронного электродвигателя пропорционален квадрату напряжения. 3. Синхронные электродвигатели имеют высокую перегрузочную способность. Кроме того, перегрузочная способность синхронного двигателя может быть автоматически увеличена за счет повышения тока возбуждения, например, при резком кратковременном повышении нагрузки на валу двигателя. 4. Скорость вращения синхронного двигателя остается неизменной при любой нагрузке на валу в пределах его перегрузочной способности. Способы пуска синхронного электродвигателя |