Проектирование захвата манипулятора. Государственное бюджетное профессиональное образовательное учреждение московский государственный образовательный комплекс
 Скачать 1.83 Mb. Скачать 1.83 Mb.
|

С 2007 года компания активно участвует в программе по обеспечению дополнительными лекарствами отдельных категорий граждан.Стратегия развития компании «Р-Фарм» полностью соответствует задачам, определенным Правительством Российской Федерации - импортозамещению лекарственных средств и развитию отечественного производства лекарственных средств. В настоящее время приоритетным направлением деятельности компании является инвестиционный проект по организации производства готовых лекарственных форм в Ярославле. Изначально производство ЗАО «Р-Фарм» проектировалось с учетом всех беспрецедентных для России требований GMP, особенно в производстве стерильных инъекционных лекарственных форм. В рамках проекта будут производиться препараты для лечения наиболее социально значимых заболеваний, таких как онкологические, гематологические, иммунологические, метаболические, вирусные и бактериальные инфекции. ЗАО «Р-Фарм» специализируется на поставках высокотехнологичных препаратов для нужд больничного сектора здравоохранения: онкологии, гематологии, иммунологии, антибактериальной, противовирусной, в том числе противовирусной терапии, препаратов и препаратов для трансплантации органов, лечения рассеянного склероза, гемофилии. сахарный диабет, миорелаксанты, рентгеноконтрастные вещества и анестетики. В число клиентов Р-Фарм входят ведущие федеральные и региональные медицинские исследовательские центры, ведомственные больницы и поликлиники, крупнейшие региональные лечебно-профилактические учреждения, в основном онкологические аптеки и клинические больницы, а также другие игроки фармацевтического рынка - государственные и муниципальные аптеки, склады и др. и т.п. аптеки ... Аптеки, коммерческие дистрибьюторы в регионах России. Компания нацелена на интенсивный рост, опережающий рост рынка (более 50% в год) и расширение своего ассортимента для удовлетворения потребностей граждан России в современных высокотехнологичных препаратах. Помимо активного расширения продуктовой линейки, компания также охватывает все сегменты фармацевтического рынка, включая вакцины, расходные материалы и парентеральное питание. Собственное производство создаст огромное конкурентное преимущество для достижения наших целей и удовлетворения потребностей наших клиентов в лекарствах для передового лечения и профилактики заболеваний.1.2. Основные понятия в области захватных устройств. Захватным устройством ПР называется его рабочий орган, предназначенный для захвата и удержания производственного объекта и / или технологического оборудования, называемого объектом. ГОСТ 26063—84 устанавливает следующие типы захватов ПР: механические, вакуумные, магнитные и другие (рис. 1.1). 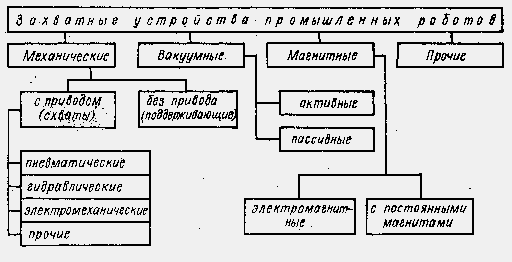 Рис. 1.1. Захватные устройства промышленных роботов Общим понятием захватных устройств всех типов является понятие «рабочий элемент». Рабочий элемент - это элемент захватного устройства, находящийся в непосредственном контакте с объектом. Для магнитных захватов рабочими элементами являются элементы магнитной системы, к которой притягивается объект, для вакуумных устройств - соприкасающаяся с объектом присоска, ограничивающая полость выброса воздуха. Со сроком «Элементы произведения» в литературе употребляются антропоморфные термины: «губы», «пальцы», «челюсти» и др. Механические захваты - это захватные устройства, в которых объект удерживается под действием реакций в точках (областях) контакта с рабочими элементами, создаваемыми двигателем или собственным весом объекта. Механические захваты подразделяются на захватные и опорные. Захват - это механический захват, который представляет собой механизм, который удерживает объект, захватывая его рабочими элементами, когда они перемещаются двигателем. Опоры представляют собой механические захваты без подвижных звеньев и представляют собой опоры, на которых объект удерживается силой тяжести (ковши для захвата, транспортировки и заливки жидкого металла, крюки, штифты, призматические опорные элементы, лопасти и т. Д.). Вакуумные захваты - это ручки, которые удерживают объект, втягивая воздух в закрытую полость рабочего элемента - присоски. Существуют активные вакуумные захваты, в которых вакуум воздуха создается принудительно с помощью вакуумных насосов или эжекторных устройств, и пассивные, в которых вакуум воздуха создается за счет его смещения при деформации рабочих элементов. Магнитные захваты - это захваты, которые удерживают объект под действием магнитных сил, создаваемых постоянным магнитом или электромагнитом. По способу замены хомуты делятся на два, которые можно заменить вручную и автоматически. Незаменяемые зажимы, установленные с использованием постоянных соединений, обычно не используются. Место крепления ручки к руке манипулятора называется механическим интерфейсом. Прямоугольная декартова система координат для захвата связана с основанием захвата, начало координат которого находится в условном геометрическом центре захвата или удерживаемого объекта. В проекциях на оси данной системы координат определяются основные геометрические силовые, прецизионные, статические и динамические характеристики захвата. Основными техническими характеристиками захватов всех типов являются: номинальная грузоподъемность, усилие захвата, предельно допустимые значения сил и моментов, действующих по осям системы координат захвата, время захвата и время реакции, масса, габариты, показатели надежности. Сила захвата в стандартах не указана; обычно говорят, что это сила воздействия рабочих элементов на объект. В захватах сила захвата создается приводом, который перемещает рабочие элементы во время захвата, пока они не захватят объект. В пружинных зажимах сила захвата обеспечивается пружинами, которые удерживают объект в равновесии. Время захвата - это время между сигналом от контроллера захвата и окончанием процесса, когда объект принимает устойчивое положение равновесия в захвате, а сила захвата достигает своего установившегося значения. Время выпуска - это время между подачей контроллером сигнала проверки и окончанием процесса. Для дескрипторов завершение процесса освобождения означает освобождение объекта и полное выдвижение дескриптора. Номинальная грузоподъемность захвата - это максимально допустимый вес захватываемых предметов для данного захвата. При оснащении таким зажимом PR конкретной модели фактическая масса удерживаемого объекта не должна превышать допустимую нагрузку PR, то есть большее значение массы объекта, при котором он гарантированно захватывается, составляет Приведены поддерживаемые и фиксированные значения КПД PR. Максимально допустимые значения приложенных сил (моментов) - это наибольшие значения силы (момента), приложенной к объекту в центре (в начале системы координат захвата), при котором объект удерживается захватом. . ... Приложенные силы (моменты) создаются силами тяжести, инерции, силами взаимодействия с другими объектами и оборудованием, действующими на объект. Приложенные силы не включают силу захвата и реакцию в точках контакта объекта с рабочими элементами. Захваты обычно предназначены для работы с одним объектом и выполняют только функции захвата, удержания и освобождения. В этом случае используются многообъектные и многофункциональные захваты. Захваты - это многообъектные устройства, предназначенные для захвата и удержания двух или более объектов. Многофункциональные захваты - это захваты, предназначенные для работы с основными функциями технологических операций и измерительных операций. |