Мои лекции по Грачеву. РС-71. Грачев Николай Николаевич Список литературы
 Скачать 0.88 Mb. Скачать 0.88 Mb.
|

tg | ||||||||||||||||||||||||||||||||||||||||||
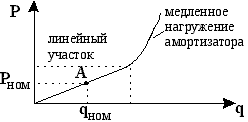 | Р - сила q - деформация А - рабочая точка |
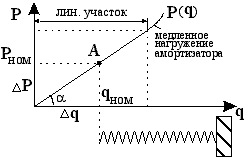 | А - рабочая точка - положение равновесия системы. |
 , причем для линейного участка
, причем для линейного участка  , т.е. тангенсу угла наклона характеристики.
, т.е. тангенсу угла наклона характеристики.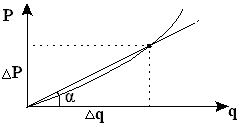
Динамическое нагружение.
 .
.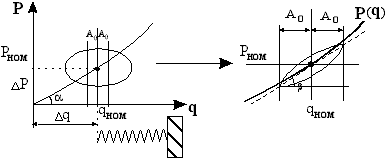
Следовательно, для нелинейных характеристик Cg существенно отличается от С, tg
> tg , Cg > C
, Cg > C  динамическая жесткость больше, чем статическая.
динамическая жесткость больше, чем статическая.В практических расчетах значение Cg приведены в соответствующих экспериментально полученных графиках для конкретного типа амортизаторов. Даже для линейных участков часто принимают Сg = (1,1 … 1,3)С .
Определение статической и динамической жесткости системы виброизоляцииции.
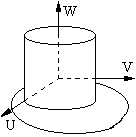 | Для амортизаторов, которые часто бывают телами вращения, приняты главные направления. |
Главные направления - это такие направления осей, деформация вдоль которых вызывает деформацию только вдоль этого направления.
Жесткостные параметры амортизатора задаются также вдоль главных направлений, т.е. необходимо задать Cu, Cw, Cv. Если амортизатор - тело вращения, то Cu = Cv > Cw, аналогично задается и динамическая жесткость Cgu, Cgw, Cgv, причем Cgu = Cgv > Cgw.
Амортизаторы устанавливаются в системе и ориентируются как правило таким образом, чтобы их главные направления были параллельны осям блока.
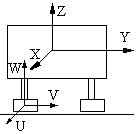 | U || X; W || Z; V || Y. Направление оси W амортизатора совпадает с действием статической нагрузки. | |
| В дальнейшем оси координат будут обозначаться 2-мя буквами: Z-W; Y-V; X-U. | | |
Для системы виброизоляцииции, в которой существует n амортизаторов, справедливо:
 |  |
Эти значения Cg определяют жесткостной параметр системы, характеризующей поступательное движение блока: т.е. эти динамические жесткости определяют колебание блока вдоль координат Z-W; Y-V; X-U.
Поворотные жесткости системы виброизоляциицию.
Данный пример - поворот вокруг оси Х.
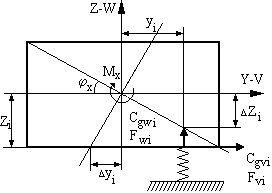 | Мх - момент закручивания блока вокруг оси Х.  - угол поворота. - угол поворота.  Zi, Yi - координаты установки амортизатора (плечи приложения усилий, создающих моменты).  Zi - деформация блока вдоль оси Z.Zi = Yi* (ввиду малости угла). Zi - деформация блока вдоль оси Z.Zi = Yi* (ввиду малости угла). |
Данная деформация вызывает вертикальную реакцию Fwi . Одновременно амортизаторы деформируются и в горизонтальной плоскости:
Zi = Zi* (ввиду малости угла) - Это вызывает горизонтальную реакцию Fvi .Усилие - произведение жесткости на деформацию.
Можно рассчитать моменты:

Общий момент от 4-х амортизаторов:
Расчет поворотных жесткостей.
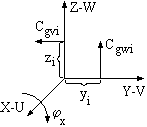 |  Схема отображает все компоненты, необходимые для ее определения. |
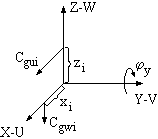 |  Моменты, препятствующие повороту, возникают в плоскости ZY. |
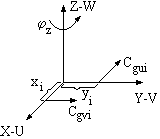 |  Препятствующие моменты возникают в плоскости XZ. |
Поворотные жесткости характеризуют колебательные движения вокруг осей X, Y, Z.
Примечания:
Динамические жесткости системы определяются только параметрами виброизолятора и фиксируются, как только выбран конкретный тип виброизолятора.
Поворотные жесткости при заданном типоразмере виброизолятора могут изменяться конструктором путем изменения координат установки виброизолятора.
Основные виды диссипативных сил.
Диссипативные силы – возникают при колебаниях системы и за счет трения совершают необратимую работу.
Основные виды диссипативных сил:
Силы трения в опорах и сочленениях.
Силы сопротивления среды, в которой происходят колебания.
Силы внутреннего трения в материалах опор (в амортизаторах).
Принимаемое обозначение сил:
 функция скорости. «-» т.к. силы противоположны по направлению скорости.
функция скорости. «-» т.к. силы противоположны по направлению скорости.Классификация диссипативных сил.
| 1 | | - нелинейная функция от скорости. При аналитических исследованиях стараются избежать этой зависимости. При использовании систем виброизоляторов нелинейности, как правило, не встречаются. | ||
| 2 | 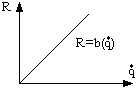 | - линейная зависимость – вязкое трение – характерна для случая сопротивления среды, в которой происходит колебание. | ||
| 3 | 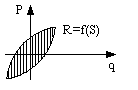 | - гистерезисные потери (внутреннее трение в материале). S – площадь петли гистерезиса. Здесь принимают следующее допущение (из-за сложности подсчета площади петли):  . . | ||
| 4 | | - сухое трение (кулоново трение). R =  H характеризуется независимостью диссипативных сил от скорости. H характеризуется независимостью диссипативных сил от скорости. | ||
Любые виды диссипативных сил реализуются в конструкциях виброизоляторов и конкретных характер функции
 определенным образом влияет на движение объекта при вибрации. Коэффициент b (b0) называется коэффициентом демпфирования. Его значения для нормализованных виброизоляторов приведены в справочниках.
определенным образом влияет на движение объекта при вибрации. Коэффициент b (b0) называется коэффициентом демпфирования. Его значения для нормализованных виброизоляторов приведены в справочниках.