2020_Бакалавр_Кокишев Д. К. И. Сатпаева Институт промышленной автоматизации и цифровизации Кафедра автоматизации и управления Кокишев Дамир Алтынбекович Исследование
 Скачать 0.83 Mb. Скачать 0.83 Mb.
|

Расчетная частьРазработка схем и моделирование процессов переработки нефти на Павлодарском нефтехимическом заводе Некоторые эксплуатационные данные по расходам воды и нефти показаны на рисунке 2.1. Здесь наблюдаются явные колебания скорости оттока воды. Уровни воды и нефти внутри сепаратора показаны на рисунке 2.2. Можно наблюдать, что колебания уровня воды находятся в гораздо меньшем масштабе (процентах) по сравнению с колебаниями скорости оттока воды, как показано на рисунке 2.1, особенно после первых 1000 сек. Некоторые проблемы с перенапряжением также можно наблюдать, анализируя эти данные. 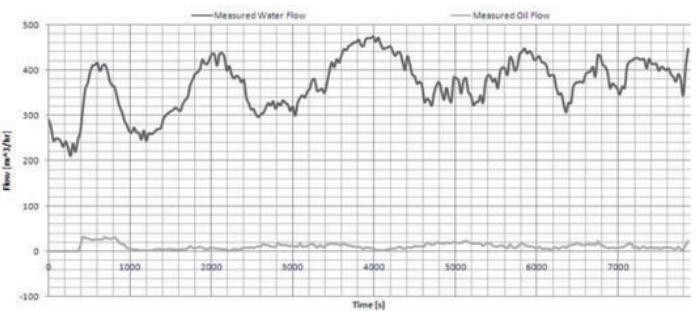 Рисунок 2.1 – Измеренные скорости оттока воды и нефти за определенный промежуток времени Например, в течение периода 3900 сек. до 4100 сек., из рисунка 2.2, уровень воды немного ниже среднего, в то время как из рисунка 2.2 очевидно, что скорость оттока воды увеличивается. Между тем, скорость оттока нефти довольно низка, и уровень нефти в этот период снижается. Все эти наблюдения позволяют сделать вывод о том, что в этот период происходили большие всплески воды или газа [8]. 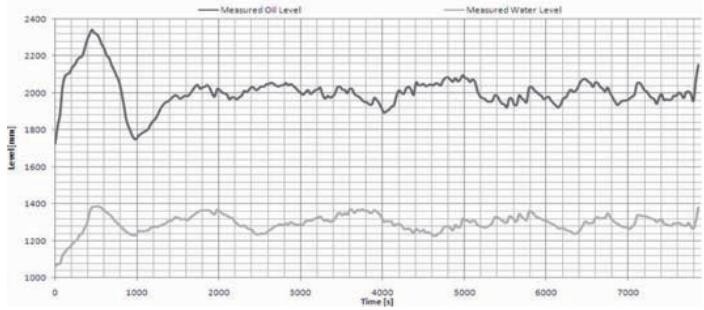 Рисунок 2.2 – Измеренные уровни воды и нефти в течение определенного интервала времени Системные параметры и переменные, используемые ниже, перечислены в таблице 2.1 Таблица 2.1 - Системные переменные и параметры
В соответствии с геометрией сепаратора, объем воды внутри сепаратора является функцией уровня воды h и имеет определенное соотношение как:   V(h) = (r2cos−1 (r−h) − (r − h)√2rh − h2L. (1) V(h) = (r2cos−1 (r−h) − (r − h)√2rh − h2L. (1)r Поскольку для нормальной работы требуется уровень воды между уровнем тревоги высокого уровня (LAH) и уровнем сигнала тревоги низкого уровня (LAL), таким образом, соотношение (1) может быть упрощено как линейная зависимость в течение этого интервала, то есть V(h) = ALh(t) где A ≈ πr2. Динамика объема воды внутри сепаратора соответствует принципу баланса масс, т. е.: dV(t) ≈ AL dh(t) = Q  (t) − Q (t). (2) dt dt in out Согласно теории динамики потока, расход воды через клапан LCV- 340018 можно определить как:  Qout = Cv f(u)√∆Pout, (3) ρwгде f(u) представляет характеристики клапана зоны открытости, относящиеся к проценту открытости u. Для этого конкретного линейного клапана LCV-340018 линейное соотношение хорошо соблюдается. Таким образом, существует f(u) = uUmax. Перепад давления на клапане, обозначенный как Pout, можно оценить как: ΔPout(t) = Pg(t) + ρ0gh0(t) + ρwgh(t) − Pw(t). (4) Коэффициент Cv клапана в (3) оценивается с использованием метода наименьших квадратов на основе записанных данных о расходе воды, уровнях воды и масла внутри сепаратора, давлении газа внутри сепаратора и давлении воды на выходе. При условии, что плотность воды постоянна, значение Cv будет решением:  mincv ∑i |Q out (i) − Cv u(i)U max √ΔPout(i) |2. ρw Проверка полученной модели системы показана на рисунке 2.3. В общем случае погрешность предсказания ограничена в пределах 10%. Валидация данной модели находится в пределах допустимых значений. В предположении, что давление газа, давление ниже по потоку водяного клапана и уровень масла внутри сепаратора являются постоянными или их отклонения от средних значений игнорируются, нелинейная модель системы линеаризуется при нормальных условиях эксплуатации. 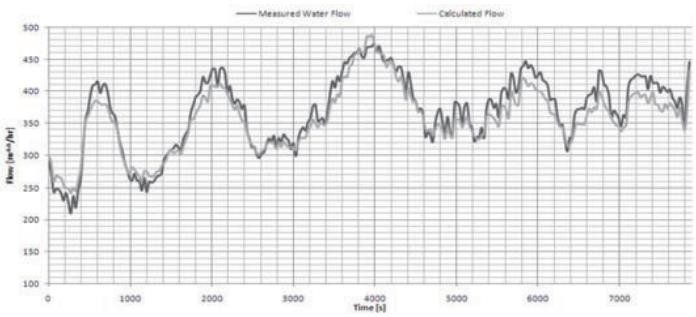 Рисунок 2.3 – Валидация модели: измеренные и прогнозируемые скорости оттока В предположении, что давление газа, давление ниже по потоку водяного клапана и уровень масла внутри сепаратора являются постоянными или их отклонения от средних значений игнорируются, нелинейная модель системы линеаризуется при нормальных условиях эксплуатации. Вставляя конкретные параметры системы, линеаризованная модель приводит к форме:  in 47.55 dΔh(t) = Q dt (t) − 1.81Δh(t) − 10.82Δu(t), где Δh(t) (Δu(t)) представляет отклонения уровня воды (положение клапана) до равновесия. Таким образом, передаточная функция, представляющие отношения от неизвестного возмущения Qin(t) и управляющего входа u (t) к выходу h (t), соответственно, будет выглядеть вот так:  G(s) = 243.5s+4382 G(s) = 243.5s+438247.55s2+245.3s+4382 . (5) На рисунке 2.4 представлена структурная схема математической модели в Simulink. 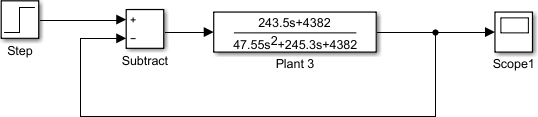 Рисунок 2.4 – Структурная схема в матлабе Результаты моделирования представлен на рисунке 2.5. 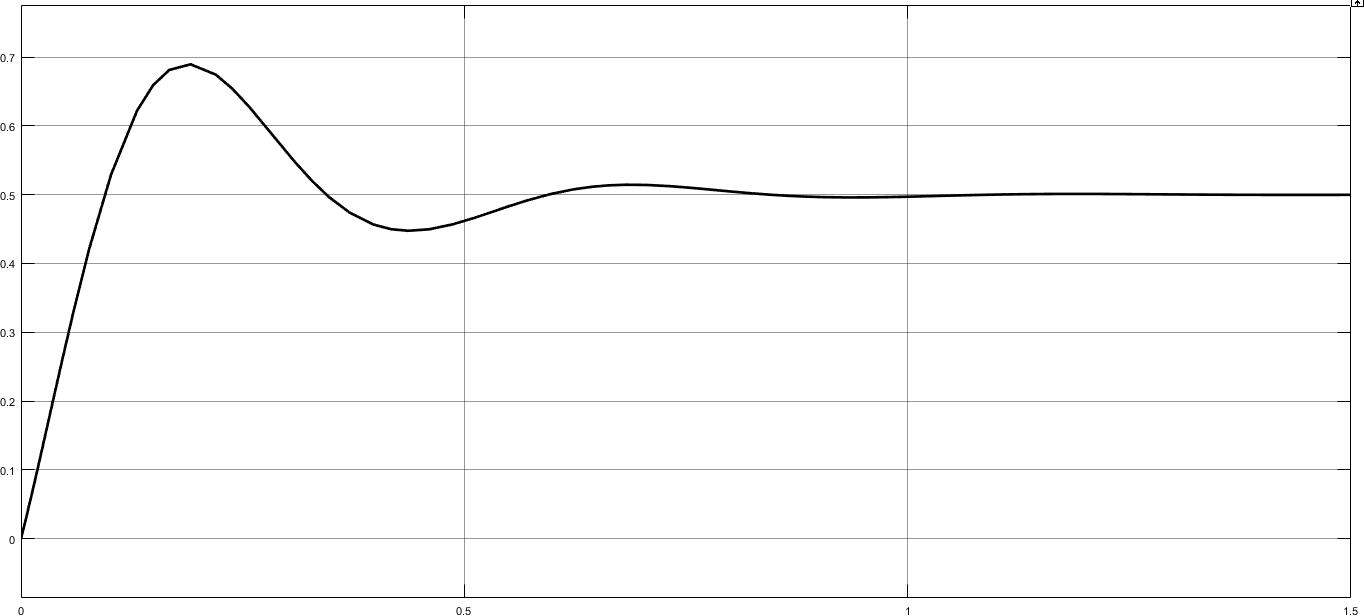 Рисунок 2.5 – Результат моделирования структурной схемы Как видно из рисунка, система устойчива, но не приходит к желаемому значению (1) и имеется перерегулирование. С целью улучшения динамики системы синтезируем типовой регулятор.
Построение АФЧХ разомкнутой системы. Для построения АФЧХ сначала необходимо определить мнимые и действительные части характеристического уравнения разомкнутой системы:  T(s) = 243.5s+4382 T(s) = 243.5s+438247.55s2+490.6s+8764 . (6) Далее нужно использовать постановку с оператора Лапласа s в комплексную переменную jw:  T(jw) = j243.5w+4382 . T(jw) = j243.5w+4382 .j247.55w2+j490.6w+8764 Для упрощения этого выражения необходимо избавится от мнимой части в знаменателе:  T(jw) = −j11578.425w3−88903w2−j157752w+38403848. T(jw) = −j11578.425w3−88903w2−j157752w+38403848.76807696−592768.04w2+2261.0025w4 Отделяем действительную и мнимую часть по формуле: T(jw) = Re(w) + jIm(w). (7)  T(jw) = −88903w2+38403848 T(jw) = −88903w2+3840384876807696−592768w2+2261w4 − j 11578.425w3+157752w . 76807696−592768w2+2261w4Извлекаем из выражения действительную и мнимую часть:  Re(w) = −88903w2+38403848 Re(w) = −88903w2+3840384876807696−592768.04w2+2261.0025w4 Im(w) = − 11578.425w3+157752w, (8) . (9) 76807696−592768.04w2+2261.0025w4 Подбирая различные частоты, заполняется таблица 2.2 Таблица 2.2 – Таблица значений реальной и мнимой части
Используя данные в таблице 2.2, построим график АФЧХ разомкнутой системы, который представлен на рисунке 2.6. 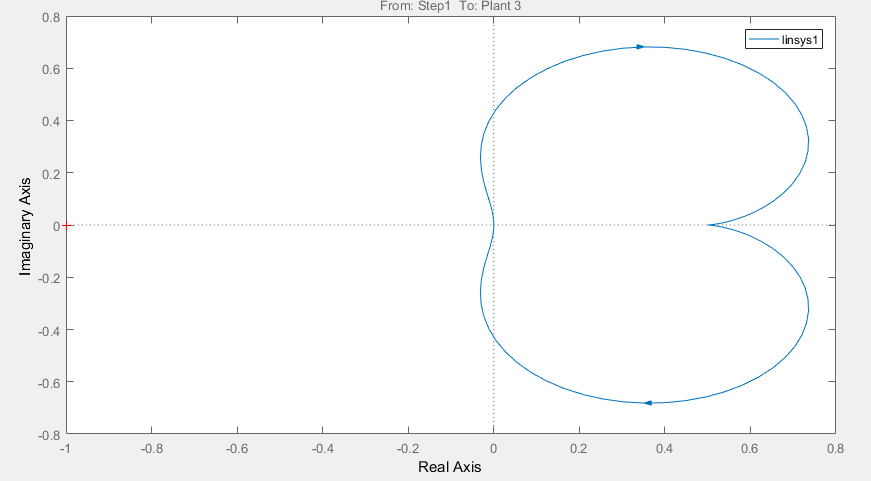 Рисунок 2.6 – График АФЧХ разомкнутой САУ Построение АЧХ и ФЧХ разомкнутой системы. Для построения амплитудно-частотной характеристики используется нижеследующая формула  A(w) = √Re2(w) + Im2(w). Подставляем уравнения из 8 и 9 формулы и составляем таблицу значений АЧХ. Таблица 2.3 – Таблица значений АЧХ
Используя данные в таблице 2.3, построим график АЧХ разомкнутой системы, который представлен на рисунке 2.7. 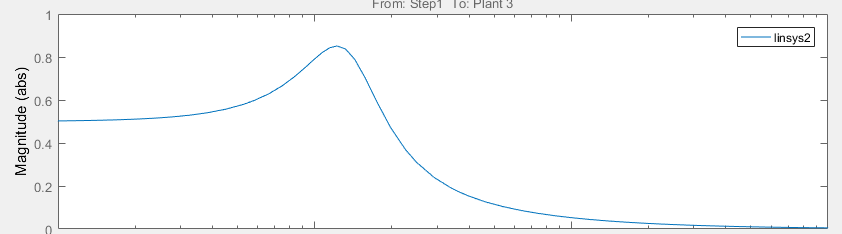 Рисунок 2.7 – График АЧХ разомкнутой системы Для построения же фаза-частотной характеристики используется следующая формула:  φ(w) = atan φ(w) = atanIm(w) Re(w). Также как в предыдущих случаях давая значения 𝑤𝜖[0; +∞], составляется таблица 2.4 значений ФЧХ. Таблица 2.4 – Таблица значений ФЧХ
Используя данные в таблице 2.4, построим график ФЧХ разомкнутой системы, который представлен на рисунке 2.8. 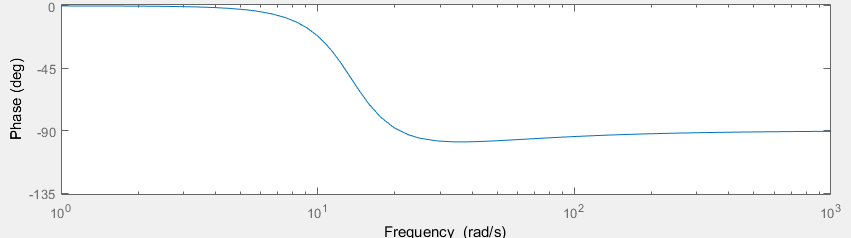 Рисунок 2.8 – График ФЧХ разомкнутой системы Построение ЛАЧХ и ЛФЧХ разомкнутой системы. Для построения используется следующая формула: L(w) = 20 lg(A(w)). Подставляя значения 𝑤𝜖[0; +∞], заполняется нижняя таблица Таблица 2.4 – Таблица значений ЛАЧХ разомкнутой системы
Используя данные в таблице 2.4, построим график ЛАЧХ разомкнутой системы, который представлен на рисунке 2.9. 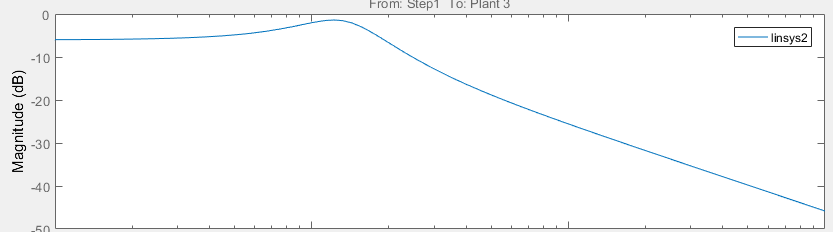 Рисунок 2.9 – График ЛАЧХ разомкнутой системы Для ЛФЧХ используется следующая формула: φ(w) = atan Im(w) Re(w).По таблице 2.5 строится график, как показано на рисунке 2.11. Таблица 2.5 – Таблица значений ЛФЧХ разомкнутой системы
Используя данные в таблице 2.5, построим график ЛФЧХ разомкнутой системы, который представлен на рисунке 2.10. 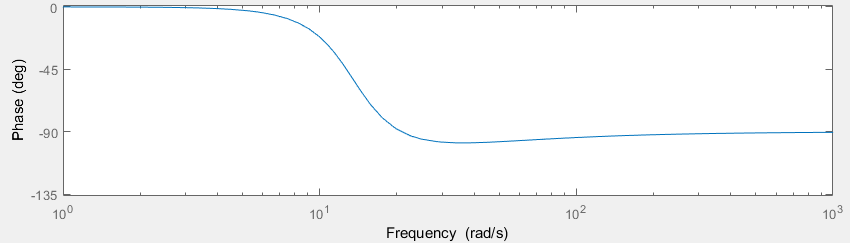 Рисунок 2.10 – График ЛФЧХ разомкнутой системы На рисунках 2.6, 2.7, 2.8, 2.9, 2.10 показаны частотных характеристики математической модели (6) разомкнутой системы. |