Расчет электропривода. Расчет электропривода Смирнов Д.В. Конструкторская часть Выбор электродвигателя
 Скачать 2.14 Mb. Скачать 2.14 Mb.
|

Конструкторская часть Выбор электродвигателя Определение номинального момента и номинальной частоты вращения выбранного электродвигателя Определение момента инерции системы Выбор преобразователя частоты Высокая перегрузочная способность Защита от перенапряжения и пониженного напряжения Защита от перегрева преобразователя Защита двигателя с помощью подключения РТС терморезистора или KTY датчика Защитное заземление Защита от короткого замыкания Тепловая защита по  Защита от блокировки двигателя Защита от опрокидывания Защита от изменения параметров
Основные характеристики: Простой ввод в эксплуатацию Особо гибкая конфигурация благодаря модульной конструкции Шесть встроенных, свободно параметрируемых цифровых входа Два аналоговых входа (0 В ... 10 В и 0 мA ... 20 мA), могут использоваться как 7 и 8 цифровые входа Два аналоговых выхода (0/4 мA … 20 мA) Три параметрируемых релейных выхода (30 В DC/5 В, активная нагрузка, 250 В DC/2 А, индуктивная нагрузка) Бесшумная работа двигателя благодаря высокой частоте ШИМ Полная защита двигателя и преобразователя Рассмотрим выбранную схему преобразователя частоты. Каждый преобразователь находится в шкафу. На рис. 1.1 представлена принципиальная схема силовой части такого шкафа. 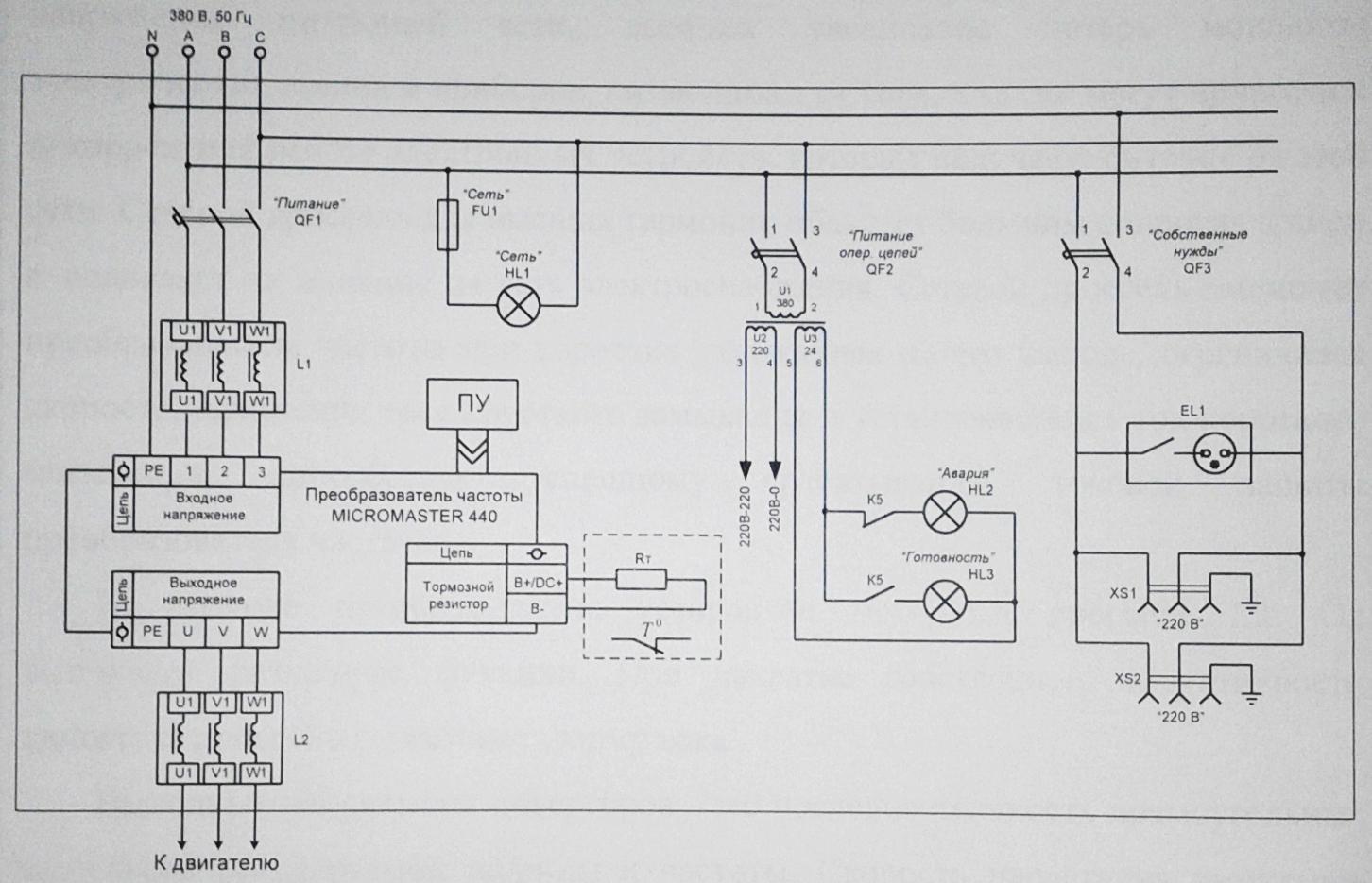 Рис. 1.1. Принципиальная схема шкафа с преобразователем После включения автоматического выключателя QF1 преобразователь получает питание и при отсутствии неисправностей готов к работе. На двери преобразователя предусмотрена индикация состояния преобразователя лампами. Внутри имеется местное освещение люминесцентной лампой EL1, автоматически включаемой при открывании двери. Для подключения переносных приборов предусмотрены розетки 220 В. ПУ – панель управления преобразователем, установленная на разъеме. Так как существует несколько модификаций панелей, то их легко можно менять при необходимости благодаря разъему. Сетевой дроссель L1 выполняет защитную функцию, как в отношении самого преобразователя, так и в отношении сети электроснабжения. Он является двухсторонним буфером между нестабильной сетью электроснабжения (провалы и всплески напряжения) и преобразователем частоты – источником высших гармоник (5, 7, 11, 13, 17 и так далее). Высшие гармоники искажают синусоиду напряжения питающей сети, вызывая увеличения потерь мощности электрических машин и приборов, питающихся от сети, а также могут привести к некорректной работе электронных устройств, которые получают питание от этой сети. Сетевой дроссель для высших гармоник обладает большим сопротивлением и подавляет их влияние на сеть электроснабжения. Сетевой дроссель защищает преобразователь частоты при коротких замыканиях на его выходе, ограничивая скорость нарастания тока короткого замыкания, способствуя успешному срабатыванию токовой защиты преобразователя частоты. На выходе преобразователя установлен моторный дроссель L2. Он выполняет различные функции. При нехватке собственной индуктивности двигателя дроссель сглаживает форму тока. Выходные напряжения инверторов – это последовательность прямоугольных импульсов регулируемой частоты и ширины. Скорость нарастания импульсов напряжения очень велика, что представляет опасность для изоляции питания электродвигателя. Ограничения скорости нарастания напряжения, а в результате снижения риска повреждения изоляции двигателя, достигается путем установки между двигателем и инвертором моторного дросселя. Моторные дроссели используются также для ограничения тока короткого замыкания до момента срабатывания защиты и выключения тока в цепи. Зачастую подбор соответствующей индуктивности моторного дросселя является единственной возможностью защиты выходных транзисторов. Подбор индуктивности моторного дросселя зависит от максимальной величины тока короткого замыкания в цепи. На практике часто двигатель значительно удален от преобразователя частоты. Длинный кабель обладает большими емкостями, которые способствуют увеличению потерь в мощности преобразователе частоты и кабеле. Моторный дроссель, кроме защиты изоляции двигателя, компенсирует емкость питающей линии, а также ограничивает гармоники и коммутационные напряжения в цепи двигателя. В результате двигатель меньше греется. Также в шкафу установлен ящик сопротивлений, который предназначен для сброса энергии в тормозных режимах. Сопротивление подключено через транзисторный ключ к звену постоянного тока преобразователя. Благодаря ключу, можно изменить ток торможения и, соответственно, интенсивность торможения привода. Силовая часть преобразователя частоты с автономным инвертором выполнена по стандартной схеме (рис. 1.2). На входе стоит неуправляемый выпрямитель, затем напряжение сглаживается конденсатором фильтром. Конденсатор также участвует в обмене реактивной энергии с двигателем. Энергия, выделяемая при торможениях, накапливается в конденсаторе, так как нет рекуперации в сеть. Если появляется избыток энергии, то она сбрасывается на балластном сопротивлении Rт. Инвертор выполнен на базе шести IGBT – транзисторов с включенными встречно-параллельно диодами. Диоды образуют выпрямительный мост, выпрямляя в тормозных режимах напряжение с двигателя и заряжая конденсатор. Также диоды осуществляют защиту от коммутационных перенапряжений.  Рис. 1.2. Силовая часть преобразователя Цепи управления преобразователя представлены на рис. 1.3. Для управления используются дискретные и аналоговые входы. 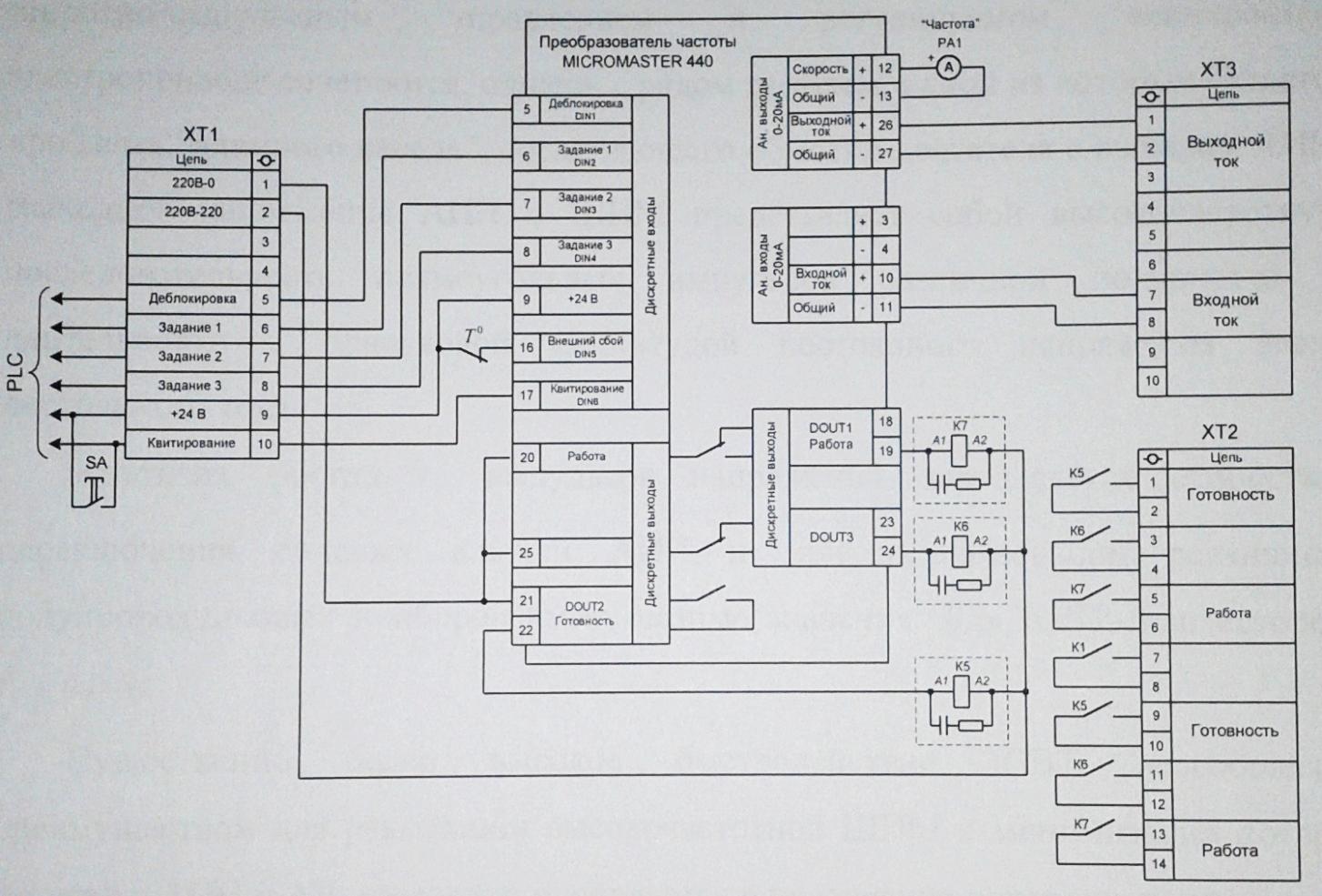 Рис. 1.3. Цепи управления преобразователя частоты Деблокировка используется для разблокировки импульсов инвертора. Задание 1, 2, 3 подразумевает задание на частоту в двоичном коде. Сигнал внешнего сбоя блокирует импульсы инвертора при перегреве тормозного сопротивления. Квитирование (сброс) ошибки производится либо из вне, либо кнопкой в шкафу преобразователя. Дискретные выходы преобразователя являются релейными. Всего можно запрограммировать функции трех релейных выходов. Здесь используются функции готовности преобразователя и информация о том, что преобразователь в работе, то есть импульсы инвертора разблокированы. Один из аналоговых выходов выдает сигнал на миллиамперметр, который показывает выходную частоту преобразователя. Второй аналоговый выход содержит информацию о токе преобразователя. Этот ток, при необходимости идет на соседний преобразователь для выравнивания нагрузки. Аналоговый вход воспринимает информацию о токе второго преобразователя, если он применяется. Встроенный технологический регулятор, осуществляющий выравнивание нагрузок, по информации о токе вносит соответствующие коррективы. Неоспоримые достоинства транзисторных IGBT-инверторов напряжение с широтно-импульсным управлением в регулируемом асинхронном электроприводе сочетаются, однако, с рядом проблем, одной из которых является проблема «длинного кабеля», соединяющего обмотки двигателя с выходом АИН. Выходное напряжение АИН с ШИМ представляет собой высокочастотную последовательность прямоугольных импульсов различной полярности и длительности с одинаковой амплитудой постоянного напряжения звена постоянного тока. Крутизна фронта  импульсов напряжения определяется скоростью переключения силовых ключей АИН и при использовании различных полупроводниковых приборов имеет разные значения. Для IGBT-транзисторов импульсов напряжения определяется скоростью переключения силовых ключей АИН и при использовании различных полупроводниковых приборов имеет разные значения. Для IGBT-транзисторов  . .Существенно более высокое быстродействие IGBT, являющееся преимуществом для реализации высокочастотной ШИМ и минимизации потерь энергии в АИН и АД, негативно проявляется в протекании переходных процессов в цепи АИН – соединительный кабель – АД на интервалах времени фронта .Прохождение импульсного сигнала с крутым фронтом вызывает волновые процессы в кабеле, приводящие к появлению перенапряжений на зажимах двигателя. Скорость  распространения высокочастотной волны ( в нашем случае случаи фронта импульса) определяется выражением. распространения высокочастотной волны ( в нашем случае случаи фронта импульса) определяется выражением. , , где Lk – индуктивность кабельной линии, Сk – индуктивность кабельной линии. Значение параметров Lk и Сk зависят от типа, конструкции и сечения кабеля (кабельной линии), но, как свидетельствуют справочные и экспериментальные данные, зависимость эта незначительна. Для широкого ассортимента монтажных проводов и кабелей усредненные значения этих параметров составляют:   Этой скорости соответствует длина волны:  где  – эквивалентная частота фронта импульса напряжения. – эквивалентная частота фронта импульса напряжения.  Время прохождения фронта импульса Тf от выхода АИН к зажимам АД определяется длинной кабеля l:  Если это время больше или равно времени фронта , то в конце кабеля из-за его несогласованности с нагрузкой возникает отраженная волна напряжения, которая суммируется с падающей (прямой) волной напряжения. В результате на зажимах АД образуется перенапряжение (рис. 1.4). Рис. 1.4. Перенапряжение на двигателе, возникающие при несогласованности «длинного кабеля» с нагрузкой Из расчета получается, что время прохождения фронта импульса меньше длительности фронта импульса, однако, это все равно вызывает перенапряжения. В данном случае необходимо учитывать длину волны сигнала, проходящего с эквивалентной частотой . Ведь кабель, длина которого соизмерима с длинной волны, сочетается «длинным кабелем». Поставляемый вместе с частотным преобразователем и устанавливаемый между инвертором и двигателем моторный дроссель позволяет значительно уменьшить длительность фронта импульса, то есть сделать его более пологим. Соответственно увеличивается эквивалентная частота фронта импульса, а длина волны увеличивается. | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||



 ,
,  – момент инерции выбранного двигателя;
– момент инерции выбранного двигателя; – приведенный момент инерции механизма, принимаем 0,5
– приведенный момент инерции механизма, принимаем 0,5

