Курсовая по электороприводу. Курсовая Работа. Курсовой проект по дисциплине Электрический привод
 Скачать 2.21 Mb. Скачать 2.21 Mb.
|

|
КУРСОВОЙ ПРОЕКТ по дисциплине: «Электрический привод» Вариант № 6 Якутск 2021 Оглавление Введение 3 1. Задание к курсовой работе 4 2. Выбор элементов системы 7 2.1. Выбор типа и мощности привода. 7 2.1.1. Определение сил и моментов 7 2.1.2. Предварительный расчет мощности электродвигателя 9 2.1.3. Определение передаточного числа редуктора 10 2.1.4. Построение тахограммы и нагрузочных диаграмм 12 2.1.6. Расчет и построение механических (электромеханических) характеристик электропривода 15 2.2. Расчет и построение переходных процессов системы Г - Д со схемой возбуждения рис. 3.5а 17 3. Расчет преобразователя частоты для регулирования скорости асинхронного двигателя (АД). 20 4. Выбор схемы и расчёт параметров выпрямителя 23 4.1. Выбор схемы выпрямителя 23 4.2. Выбор и расчёт параметров силового трансформатора 23 4.3. Определение параметров тиристоров управляемого выпрямителя 23 4.4. Выбор токоограничительных реакторов 25 4.5. Расчёт параметров силового контура управляемого выпрямителя 26 5. Расчёт параметров фильтра 28 6. Выбор элементов защиты преобразователя частоты 30 6.1. Выбор автоматического выключателя 30 6.2. Выбор плавких предохранителей 31 6.3. Защита от перенапряжения 32 Заключение 39 ВведениеКурсовое проектирование является важным этапов изучения курса «Электропривод» студентами «Электроэнергетики и электротехники» предполагает законченным освоение курсов теоретических основ электротехники, теории автоматического управления и электрических машин. Целью курсовой работы является приобретение навыков в разработке, применении известных методов расчета и проектировании приводов производственных механизмов, которые бы обеспечивали высокую производительность, имели бы минимальные массогабаритные показатели и энергозатраты, рациональные динамические режимы и т.д. В курсовой работе предусматривается разработка электропривода по системе генератор-двигатель с асинхронным приводным двигателем с ШИМ общепромышленных механизмов циклического действия. Выбор такой системы электропривода обусловлен учебными задачами - закрепление знаний по курсу "Электропривод". Поскольку данные методические указания предназначены также и для студентов-заочников, выполняющих курсовую работу до начала лабораторно-экзаменационной сессии, т.е. до проведения установочных лекций, и к тому же, в ряде случаев, проживающих в отдаленных районах, где обеспечение учебной и особенно научно-технической литературой весьма ограничено, а получение текущих консультаций исключено, то была поставлена задача несколько подробнее остановиться на некоторых разделах курсовой работы, помочь студентам сориентироваться в вопросах курсового проектирования, дать рекомендации по методикам и особенностям расчетов и привести некоторые справочные данные. 1. Задание к курсовой работеЗадачей курсовой работы является разработка разомкнутой системы. реверсивного электропривода производственного механизма, выбор и расчет его силовых элементов, расчет и построение нагрузочных диаграмм и тахограмммы, статических и динамических характеристик, кривых переходных процессов и проверка двигателя по нагреву. На рис. 2.1 приведена кинематическая схема механизма наклонного подъемника, электропривод которого надлежит разработать. 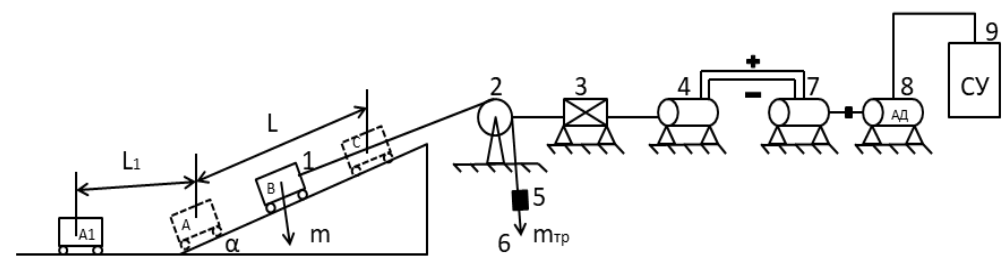 Рис.2.1 Кинематическая схема механизма наклонного подъемника 1 - тележка, 2 - барабан, 7 – Генератор, 3- редуктор, 4 - двигатель, 8 – Асинхронный двигатель, 5 - канат, 6 – противовес, 9 – Система управления. Наклонный подъемник состоит из тележки I, перемещающейся по, рельсовому пути, уложенному к горизонту под углом α. Тележка совершает челночное движение по перемещению груза из нижнего положения из точки А или А' в верхнее положение в топку С на расстояние С или е. Е'. После разгрузки в верхнем положении тележка порожней возвращается в нижнее положение, где проводится ее загрузка, и затем цикл повторяется. Перемещение тележки осуществляется при помощи троса (система кинематических связей, для упрощения ее изображения, приведена на рис.2.I схематично), наматываемого на барабан 2, который сочленяется через редуктор 3 с двигателем 4. Для улучшения режима работы двигателя к барабану через трос 5 присоединен противовес 6. При остановках в нижнем и верхнем положении тележка удерживается с помощью электромагнитных тормозов. В общем случае предполагается, что при пуске двигателя его растормаживание происходит мгновенно в момент времени, когда электромагнитный момент двигателя Мg. сравнивается со статическим моментом Мc. Если растормаживание двигателя происходит в момент подачи управляющего сигнала на систему электропривода (напряжения питания обмотки возбуждения генератора UG' ), то тележка под действием активного статического момента, пока МG достигает его величины, может начать движение в противоположную сторону, что должно найти отражение при построении динамических характеристик. По заданию преподавателя челночное движение тележки может осуществляться и из точки А', что такие должно найти отражение при построении различных видов характеристик. Цикл работы подъемника состоит из следующих этапов. Из нижнего положения, точка А (А'), загруженная тележка, разгоняясь, осуществляет движение с постоянной рабочей скоростью Uраб, После прохождения тележкой расстояния Lʹ(Lʹ+Lʹʹ) подается сигнал на снижение напряжения питания обмотки возбуждения генератора и двигатель переключается работать на новую статическую характеристику с меньшей угловой скоростью, а тележка, затормаживаясь под действием статических сил сопротивления, переходит на движение с ползучей скорости Uполз. Затем отключается возбуждение генератора, и тележка под действием сил сопротивления останавливается в точке С с последующим наложением тормозов (сигнал на срабатывание тормозов может поступать от датчиков перемещения тележки). В аварийном случае, когда тележка не остановится в предельном положении, сигнал от концевых выключателей вызывает накладывание тормозов ещё до момента её остановки. После остановки тележка разгружается и затем, разогнавшись до рабочей скорости Uраб, движется вниз до отметки, отстоящей от точки С на расстоянии Lʹʹʹ, после чего снижается напряжение питания обмотки возбуждения генератора и двигатель переключается работать на статическую характеристику с меньшей угловой скоростью, а тележка, затормаживаясь под действием статических сил сопротивления, переходит на движение с ползучей скоростью. Останов тележки в точке А (А') происходит аналогично останову в точке С. Затем теленка загружается и на этом очередной цикл заканчивается. Ходовая часть тележки, к.п.д. редуктора и барабана характеризуются следующими величинами: 1) диаметр колеса тележки Dk = 0,25 м; 2) диаметр цапфы колеса du = 0,05 м; 3) коэффициент трения качения колеса по рельсу f = (5-6)10⁻⁴, м; 4) коэффициент трения скольжения в подшипниках колес ϻ = 0,01-0,015; 5) коэффициент, учитывающий сопротивление движению колеса от трения его реборды о рельс, от трения на торцевых частях ступицы и т.д., К = 2,2; 6) к.п.д. редуктора ηр = 0,92; 7) к.п.д. барабана ηб = 0,96. Варианты заданий для механизма наклонного подъемника приведены в таблицах 2.I и 2.2. В качестве электропривода используется система генератор постоянного тока—двигатель постоянного тока независимого возбуждения (Г—Д) с приводным асинхронным двигателем с фазным ротором. При выполнении курсовой работы необходимо: 1) привести кинематическую схему механизма наклонного подъемника и в соответствии с вариантом записать его показатели; 2) определить величины моментов сопротивления относительно вала барабана для обоих направлений движения тележки; 3) определить предварительную мощность электрических машин системы с учетом ПВ% и рациональное передаточное число редуктора; 4) рассчитать и построить тахограмму wg(t) и нагрузочные диаграммы Мg(t), Рg(t) электропривода с учетом динамических нагрузок и при условии постоянства ускорений в периоды переходных процессов; 5) проверить предварительно выбранный двигатель по мощности, используя метода эквивалентных (средних) величин, и по перегрузочной способности. Представить принципиальную схему электропривода; 6) рассчитать и построить статические механические (электромеханические) характеристики для всех режимов работы привода: для груженной и порожней тележки при работе с Uраб и Uполз; 7) Рассчитать и построить графики переходных процессов электропривода: er(t), wg(t), Mg(t) для всех участков, а такие динамическую механическую характеристику wg(Mg). |