Курсовой проект по дисциплине Грузоподъемные машины
 Скачать 0.76 Mb. Скачать 0.76 Mb.
|

2.1.10. Выбор тормозаВыбор тормоза механизма подъема осуществляется по расчетной величине тормозного момента, который определяется из условия надежного удержания груза на весу:  , гдеTст – статический момент при торможении от веса груза на тормозном валу;Kт – коэффициент запаса торможения. , гдеTст – статический момент при торможении от веса груза на тормозном валу;Kт – коэффициент запаса торможения.Статический момент от веса груза  , где , где – КПД механизма подъема на участке от груза до тормоза; – КПД механизма подъема на участке от груза до тормоза; – передаточное число механизма от барабана до вала, на котором установлен тормоз. – передаточное число механизма от барабана до вала, на котором установлен тормоз. Н·м Н·м  Н·м. Н·м.Принимаем тормоз ТКГ–400 со следующими параметрами: Диаметр тормозного шкива – 400 мм; наибольший тормозной момент 1500Н∙м; масса тормоза – 95 кг. 2.1.11. Кинематическая схема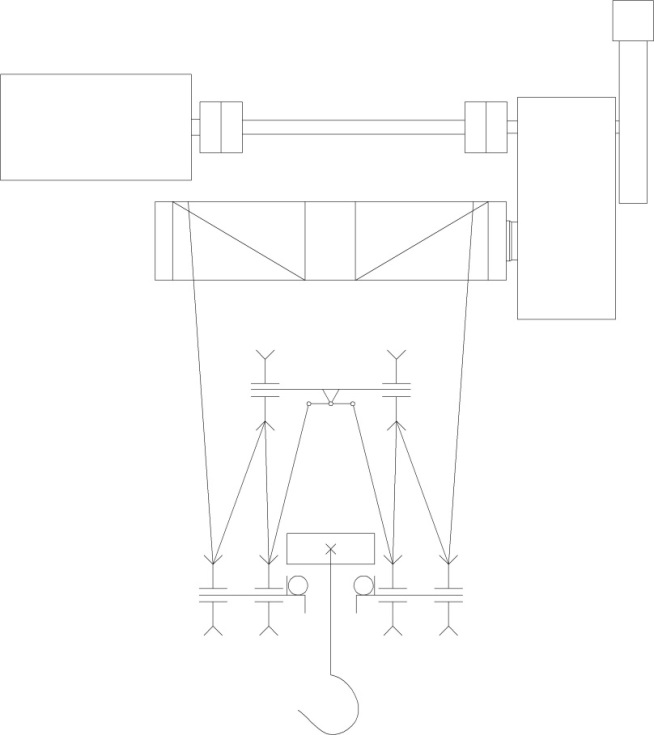 Рис. 2. Кинематическая схема механизма подъема 2.2. Механизм передвижения тележки2.2.1. Выбор кинематической схемы Рис. 3. Кинематическая схема механизма передвижения 2.2.2. Выбор колесВыбор колес производится по максимальной статической нагрузке:  , гдеGг, Gт вес номинального груза главного подъема и тележки соответственно; , гдеGг, Gт вес номинального груза главного подъема и тележки соответственно;  число ходовых колес;Кн =1,1…1,2 коэффициент неравномерности распределения нагрузки на колеса. число ходовых колес;Кн =1,1…1,2 коэффициент неравномерности распределения нагрузки на колеса.Вес тележки в предварительных расчетах можно определить из ориентировочных соотношений: GT=(0,25…0,35) GГ при режимах 1М…4М  Н НПо ГОСТ 28648–90 выбираем при нагрузке от 100 до 200 кН диаметр ходового колеса Dк = 400 мм. 2.2.3. Определение сопротивления движению тележкиПолное статическое сопротивление передвижению тележки при работе в помещении: WСТАТ=WТР+WУ, где Wтр сопротивление сил трения;Wу сопротивление от уклона путей. Сопротивление сил трения, приведенных к ободу ходового колеса:  ,где ,где  - вес крюковой подвески; - вес крюковой подвески; f коэффициент трения в подшипниках колес; коэффициент трения качения колес по рельсу;KР = 2,5 – коэффициент учитывающий сопротивление трению реборд; d диаметр посадки подшипника на вал ходового колеса.  =4666,9 Н =4666,9 НСопротивление от уклона пути: Wу = (Gт+Gг+GП), где = 0,002 уклон рельсового пути. Wу = 0,0029,81(9600+32000+687)=829,67Н. WСТАТ=4666,9 + 829,67 = 5496,57 Н 2.2.4. Расчет и выбор электродвигателя механизма передвижения тележкиВыбор электродвигателя производится в соответствии с ОСТ 24.090.85-88, который предусматривает вычисления расчетной мощности, необходимой для разгона тележки: РР=РСТ+РДИН, где РСТ,РДИН – мощность, затрачиваемая на преодоление статических и динамических нагрузок соответственно. Расчетная мощность двигателя механизма передвижения тележки:  , где vт – скорость движения тележки; , где vт – скорость движения тележки;  - допускаемое ускорение тележки, м/с2; - допускаемое ускорение тележки, м/с2;  =1,15 – коэффициент, учитывающий инерцию вращающихся масс механизма; К1= 0,7 – коэффициент использования двигателя по пусковому моменту; =1,15 – коэффициент, учитывающий инерцию вращающихся масс механизма; К1= 0,7 – коэффициент использования двигателя по пусковому моменту;  = 2,5 – кратность отношения максимального пускового момента двигателя к номинальному; исх–КПД механизма(0,8); = 2,5 – кратность отношения максимального пускового момента двигателя к номинальному; исх–КПД механизма(0,8); Рст – мощность, затрачиваемая на преодоление статических сопротивлений.  кВт. кВт. 5,65 кВт 5,65 кВтПо расчетной мощности выбирается двигатель исходя из условия Рном.1≥Рр, где Рном.1 – номинальная мощность двигателя по каталогу при ПВ=40 %. Выбираем крановый электродвигатель серии MTF 211–6 с фазным ротором для ПВ=40 %, N=7,5 кВт, n = 930об/мин; массой m=120 кг. |