Колебания и волны. Лабораторная работа 2к определение параметров физического маятника Введение
 Скачать 0.82 Mb. Скачать 0.82 Mb.
|

|
Лабораторная работа № 2-К «ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ ФИЗИЧЕСКОГО МАЯТНИКА» 1. Введение 1.1. Среди механических движений важную роль играет колебательное движение, характеризующееся определённой периодичностью. Физическое описание колебаний реального тела – чрезвычайно сложная задача. Поэтому теория колебаний оперирует с моделями: пружинным, математическим, физическим, крутильным маятниками. В основе всех этих моделей лежит представление о линейном гармоническом осцилляторе. 1.2. В классической механике линейный гармонический осциллятор – это материальная точка или абсолютно твёрдое тело, совершающее одномерные гармонические колебания под действием упругой (или квазиупругой) силы. 1.3. В настоящей лабораторной работе изучаются колебания математического и физического маятников и определяются параметры последнего. 2. Основные понятия 2.1. Математическим маятником называют идеализированную систему, состоящую из невесомой и нерастяжимой нити, на которой подвешена точечная масса. Достаточно хорошим приближением служит небольшой тяжёлый шарик, подвешенный на длинной тонкой нити. 2.2. Отклонение маятника от положения равновесия определяется угловым смещением  , образованным нитью с вертикалью (рис.1). При этом возникает момент силы тяжести М относительно оси, проходящей через точку О, равный по величине M= mglsinφ ( m– масса маятника , l – его длина) , образованным нитью с вертикалью (рис.1). При этом возникает момент силы тяжести М относительно оси, проходящей через точку О, равный по величине M= mglsinφ ( m– масса маятника , l – его длина)Вектор момента силы имеет такое направление, что стремится вернуть маятник в положение равновесия и поэтому при малых отклонениях, когда  , аналогичен квазиупругой силе. На рис.1 он направлен от нас, перпендикулярно плоскости чертежа. Применим к математическому маятнику основное уравнение динамики вращательного движения , аналогичен квазиупругой силе. На рис.1 он направлен от нас, перпендикулярно плоскости чертежа. Применим к математическому маятнику основное уравнение динамики вращательного движения  , где J– момент инерции маятника относительно упомянутой выше оси, , где J– момент инерции маятника относительно упомянутой выше оси,  – угловое ускорение, – угловое ускорение,  - сумма моментов внешних сил. Для проекций на ось вращения - сумма моментов внешних сил. Для проекций на ось вращения . (1) . (1)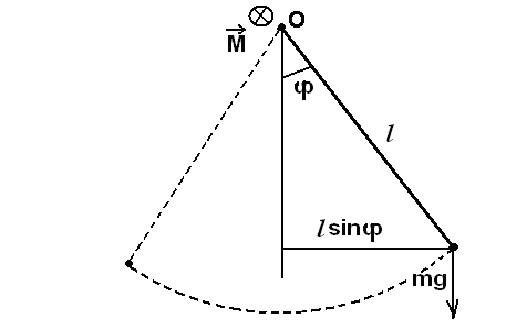 Рис.1 При малых углах  и тогда получаем дифференциальное уравнение и тогда получаем дифференциальное уравнение , (2) , (2) решением которого являются гармонические колебания  , ,с круговой частотой и периодом соответственно   , (3) , (3)которые зависят только от длины l маятника и ускорения свободного падения g. 2.3. Физическим маятником называется твердое тело, способное совершать колебания вокруг некоторой оси, не проходящей через его центр масс. В положении равновесия центр масс С находится под точкой подвеса О на одной вертикали на расстоянии a (рис.2). При отклонении маятника от положения равновесия возникает момент силы, стремящийся вернуть его обратно. Так же, как и для математического маятника,  . (4) . (4)Здесь J – момент инерции маятника относительно оси, проходящей через точку О. При малых колебаниях уравнение (4) переходит в   , (5) , (5) решением которого является  , но теперь с круговой частотой , но теперь с круговой частотой и периодом и периодом  . (6) . (6)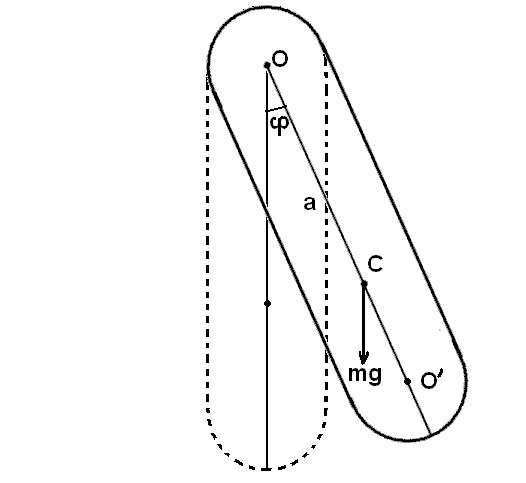 Рис.2 2.4. При сравнении формул (3) и (6) видно, что математический маятник с длиной  (7) (7)будет иметь такой же период, как и физический. Величина  называется приведённой длиной физического маятника. называется приведённой длиной физического маятника.3. Описание лабораторной установки 3.1. Лабораторная установка (рис.3) состоит из вертикальной стойки 1, основания 2 и элементов подвеса математического и физического 3 маятников, состоящих из горизонтальной стальной калёной призмы 4 и зажима 5. В качестве математического маятника применён стальной шарик 6 небольшого диаметра, подвешенный на нити в точке на линии продолжения ребра призмы, на которое опирается физический маятник. Изменять длину нити можно, наматывая её часть на детали зажима. 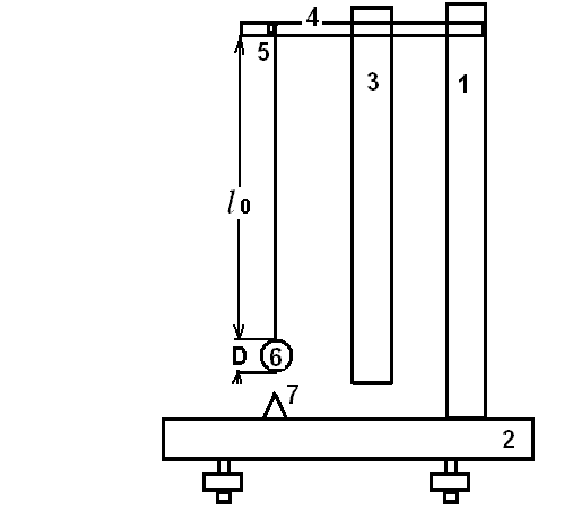 Рис.3 4. Техника безопасности 4.1. Несмотря на кажущуюся простоту лабораторной работы, её выполнение следует проводить под руководством преподавателя или лаборанта. Не допускать падения тяжёлого физического маятника. 5. Порядок измерений и обработка результатов 5.1. Внести данные измерительных приборов в табл. 1. 5.2. Туда же внести значения массы физического маятника и расстояния H между его опорами. Таблица 1
5.3. Используя математический маятник как отвес, проверить центровку установки по острию 7. Если она нарушена, восстановить её с помощью установочных винтов под платформой. 5.4. Подвесить физический маятник так, чтобы круглый вырез на его конце оказался внизу. В этом случае расстояние между точкой подвеса и центром масс а1 = (0,379 ± 0,001)м. Вывести оба маятника из положения равновесия, одновременно отклонив их на одинаковый малый угол. Изменяя длину нити математического маятника, добейтесь синхронного качания обоих маятников. 5.5. Настройку маятников на синхронное качание провести 5 раз, измеряя при этом линейкой приведенную длину физического маятника, состоящую из длины нитиl0 и половины диаметра шарика D/2. Данные поместить в табл. 2. 5.6. Подвесить физический маятник так, чтобы круглый вырез на его конце оказался вверху. В этом случае расстояние между точкой подвеса и центром масс а2 = (0,281 ± 0,001)м. Далее проделать измерения по пункту 5.5. Таблица 2
Продолжение табл. 2.
В табл. 2 рассчитать по представленным формулам приведённые длины  , , с погрешностями с погрешностями  ( ( (5) = 2,1). Далее в формулах (5) = 2,1). Далее в формулах  . .5.7. Исходя из формулы (7) рассчитать моменты инерции  5.8. Найти абсолютные погрешности  5.9. Представить окончательные результаты расчета в виде 5.9. Представить окончательные результаты расчета в виде Литература 1. Савельев, И. В. Курс общей физики. T.1. Механика / И. В. Савельев. - М.: Изд-во «Астрель», 2005. Приложение Данные H, a1, a2 являются избыточными. Покажем, что, зная Н и приведенные длины  и и  физического маятника, можно найти положение центра масс а1 , а2 и рассчитать момент инерции Jc относительно оси, проходящей через центр масс С. физического маятника, можно найти положение центра масс а1 , а2 и рассчитать момент инерции Jc относительно оси, проходящей через центр масс С.Тело физического маятника в нашей лабораторной работе достаточно симметрично (рис. 4). 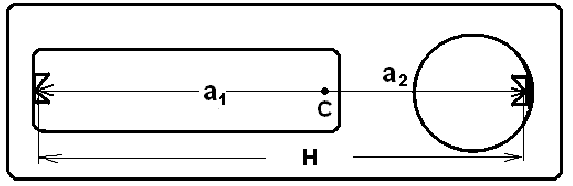 Рис.4 Из чертежа ясно, что центр масс находится на линии, соединяющей точки подвеса (опоры). По теореме Штейнера J1= Jc + ma²1J2 = Jc + ma²2. (8) Исходя из формул (7) и (8), путём сравнительно сложных расчётов, найдём   (10) (10) (11) (11)  . (12) . (12)По указанию преподавателя выполнить расчёты по формуле (11) и сравнить с данными а1, а2. Также рассчитать Jc по формуле(12). Вопросы для самоконтроля 1-й КОМПЛЕКТ 1. Дайте определение квазиупругой силы. 2. Рассчитайте приведенную длину тонкого стержня. Ось проходит через конец стержня перпендикулярно к нему. 3. Запишите основное уравнение динамики вращательного движения. 2-й КОМПЛЕКТ 1. Выведите дифференциальное уравнение колебаний математического маятника. 2. Что называется приведённой длиной физического маятника? 3. Дайте определение фазы гармонического колебания. 3-й КОМПЛЕКТ 1. Приведите параметры гармонических колебаний. Чем они определяются? 2. Что представляет собой физический маятник? 3. Покажите линейную зависимость углового ускорения от углового смещения при гармонических колебаниях маятников. 4-й КОМПЛЕКТ 1. Опишите модель математического маятника. 2. Выведите дифференциальное уравнение колебаний физического маятника. 3. Исходя из формулы (7) рассчитайте J через lпр. 5-й КОМПЛЕКТ 1. Запишите решение дифференциального уравнения гармонических колебаний. 2. Запишите формулы для определения периодов колебаний математического и физического маятников. 3. Дайте определение момента инерции твердого тела. 6-й КОМПЛЕКТ 1. Сформулируйте теорему Штейнера, её применение. 2. Тонкий обруч, подвешенный на гвоздь вбитый в стену, совершает колебания в плоскости параллельной стене. Найти период малых колебаний и приведенную длину обруча. 3. Покажите, что приведенная длина физического маятника lпр ≥ а. Написали описание лабораторной работы и составили вопросы для самоконтроля профессор Юшина М.Я. и ст. преподаватель Афанасьев Б.Л. Лабораторная работа № 3-КМ «ИЗУЧЕНИЕ СОБСТВЕННЫХ КОЛЕБАНИЙ В ЭЛЕКТРОМАГНИТНОМ КОНТУРЕ» 1. Введение 1.1. Собственные колебания в изолированной системе происходят после окончания внешнего воздействия, которое вывело её из положения равновесия. Частота колебаний в этом случае определяется только свойствами самой системы. 1.2. В реальных колебательных системах, будь то механические или электромагнитные, процесс колебаний всегда сопровождается диссипацией (рассеянием энергии), в силу чего колебания будут затухать. В одних случаях затухание в системе стремятся сделать как можно меньше, в других - искусственно увеличивают (вводят демпфирование). 1.3. Пользуясь универсальностью законов колебаний, можно изучать поведение механической системы на аналогичной ей электромагнитной. В этом случае изменять затухание в системе очень просто – изменяя величину активного сопротивления. 1.4. Целью настоящей лабораторной работы является экспериментальное ознакомление с собственными колебаниями в электромагнитном контуре и влиянием некоторых его параметров на этот процесс. 2. Основные понятия 2.1. Исходя из второго закона Кирхгофа, можно записать следующее уравнение для падений напряжения в замкнутом контуре, состоящем из индуктивности L, ёмкости С и активного сопротивления R(рис. 1): Рис. 1   , (1) , (1)где q - величина заряда на емкости; dq/dt = i - сила тока; -Ldi/dt - ЭДС самоиндукции. Введя, как обычно: β = R/2L - коэффициент затухания; ω0=  - круговую частоту собственных незатухающих колебаний , получим из (1) дифференциальное уравнение в виде - круговую частоту собственных незатухающих колебаний , получим из (1) дифференциальное уравнение в виде . (2) . (2)Решения этого уравнения опишут возможные процессы, происходящие в контуре при различных условиях. При малом затухании (β < ω0) получаем решение в виде затухающих колебаний  . (3) . (3)При критическом затухании (ω0 = β) решение имеет вид  . (4) . (4)При затухании больше критического (β > ω0) зависимость апериодическая  . (5) . (5)В формулах (3),(4),(5) A0, φ, a1, a2, b1, b2 - константы, зависящие от начальных условий q(0) и i(0). Хотя функции, описывающие q(t), различны, их графики непрерывно переходят один в другой при плавном изменении коэффициента затухания. 2.2. Для характеристики степени затухания в контуре, кроме величины β, используют логарифмический декремент затухания λ - он равен натуральному логарифму отношения двух последующих амплитуд (отличающихся по времени на период T) (рис. 2):  . (6) . (6)Из формул (3) и (6) следует:  . (7) . (7)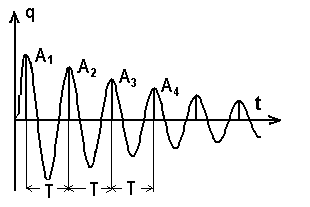 Рис. 2 2.3. В процессе колебаний энергия электрического поля конденсатора переходит в энергию магнитного поля катушки индуктивности и наоборот. Эти переходы сопровождаются потерями - выделяется тепло. Удобно пользоваться понятием добротности контура Q, которая в радиотехнике вводится, как  . (8) . (8)Можно показать, что при достаточно малом затухании (β <<ω0)  . (9) . (9)2.4. В данной лабораторной работе нужно определить период затухающих колебаний, логарифмический декремент затухания, рассчитать добротность, индуктивность и активное сопротивление контура. 2.5. Зарисовать осциллограммы колебаний. | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||