Омпс. ОМПС лаба на сдачу. Лабораторная работа по дисциплине основы механики подвижного состава
 Скачать 3.08 Mb. Скачать 3.08 Mb.
|

|
МИНИСТЕРСТВО ТРАНСПОРТА РОССИЙСКОЙ ФЕДЕРАЦИИ ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ АВТОНОМНОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ОБРАЗОВАНИЯ «РОССИЙСКИЙ УНИВЕРСИТЕТ ТРАНСПОРТА (МИИТ)» ИНСТИТУТ ТРАНСПОРТНОЙ ТЕХНИКИ И СИСТЕМ УПРАВЛЕНИЯ ЛАБОРАТОРНАЯ РАБОТА ПО ДИСЦИПЛИНЕ Основы механики подвижного состава Выполнил: Манухин К.А. Группа: ТПЛ-411 Принял: доц. Васильев А.П. Москва 2021  Содержание Введение…………………………………………………………………………..4 1. Виды конструкций рам тележек применяемых на ЭПС. Определение основных размеров рамы тележек…………………………………………….6 2. Расчет массы кузова и тележки. Составление весомой ведомости…...10 3. Разработка схемы нагружения рамы тележки и расчет действующих на неё вертикальных сил………………………………………………………….14 4.Расчет рамы тележки на прочность методом сил под действием вертикальной статической нагрузки………………………………………..19 4.1. Общие сведения о расчете рамы тележки методом сил………………19 4.2. Выбор поперечных сечений балок рамы тележки…………………….22 4.3. Разработка основной системы для решения методом сил…………...25 4.4. Построение эпюр изгибающих и крутящих моментов от единичных воздействий………………………………………………………………….…..26 4.5 Построение грузовых эпюр изгибающих и крутящих моментов…….28 4.6. Расчет коэффициентов и свободных членов системы уравнений метода сил……………………………………………………………………….34 4.7. Решение системы уравнений методом сил. построение суммарных эпюр изгибающих и крутящих моментов…………………………………...40 5. Анализ суммарных эпюр изгибающих и крутящих моментов. определение опасных сечений………………………………………………...43 6. Расчет нормальных, касательных и эквивалентных напряжений в опасных сечениях. Сравнение с допускаемыми значениями…………….44 Вывод…………………………………………………………………………….46 ВВЕДЕНИЕ Расчет рамы тележки ТПС начинают с создания расчетной модели, в которой схематизируются действующие нагрузки и геометрические свойства системы: основные размеры, размеры элементов и поперечных сечений. Кроме того, при разработке моделей используются физические гипотезы сопротивления материалов или прикладную теорию упругости, а также допущения по возможности представления отдельных элементов рамы, как абсолютно жестких или необходимости учета их податливости. В процессе движения рама тележки находится по действием следующих нагрузок: - статических: сила тяжести, определяемой полной массой кузова, массой самой рамы тележки и расположенных на ней элементов: тяговой передачи, тормозной системы и т.п.; - динамических, возникающих вследствие колебаний локомотива, реализации сил тяги и торможения, а также движение в кривой; - ударно-динамических, быстро изменяющихся во времени и достигающих больших значений. В настоящее время для расчета рам тележек на указанные выше виды нагрузок используют компьютерные технологии, а именно, созданные на их базе системы автоматического проектирования «САПР»: MSC Patran-nastran (США); CatiA (Франция); CAE Fidesys (Россия); T-FLEX Анализ; Данный саппорт использует метод конечных элементов (МКЭ), содержащий известные решения теории упругости. Совершенствование МКЭ и его программного обеспечения позволяет в сложных системах сразу рассчитывать для каждого элемента напряжения: нормальные, касательные, эквивалентные. Применение МКЭ особенно удобно в рамах со сравнительно плавно изменяющимися поперечным сечениями без массивных приваренных деталей, например, при расчете боковин рам тележек грузовых вагонов. Одновременно с этим нормами расчета дополняется оценка прочности рам только по напряжениям, определенным на основе простейших гипотез сопротивления материалов путем расчета конструкции как статически неопределенной системы. Виды конструкций рам тележек, применяемых на ЭПС. Определение основных размеров рамы тележек.Рама тележки локомотива – основной несущий узел тележки, предназначенный для размещения элементов тягового привода, тормозного оборудования и рессорного подвешивания. На раму тележки через центральное рессорное подвешивание предается вес кузова. Через элементы первичного рессорного подвешивания не буксы колесной пары передаются силы тяжести кузова, самой рамы и оборудования тележки, находящегося на раме. Силы тяги и торможения, развиваемые каждой колесной парой, передаются на раму через элементы ее связи с буксами, а затем через элементы связей рамы тележки с кузовом – на раму кузова и далее на автосцепку. При движении тележки по кривому и по прямому участку пути рама тележки воспринимает силы, действующие от колесных пар при взаимодействии их с рельсами в вертикальной и горизонтальной плоскостях. Рама тележек имеет разнообразные конструкции, что определяется совокупностью действующих на раму сил, устройством располагаемого на ней оборудования, а также принятые технологии изготовления. 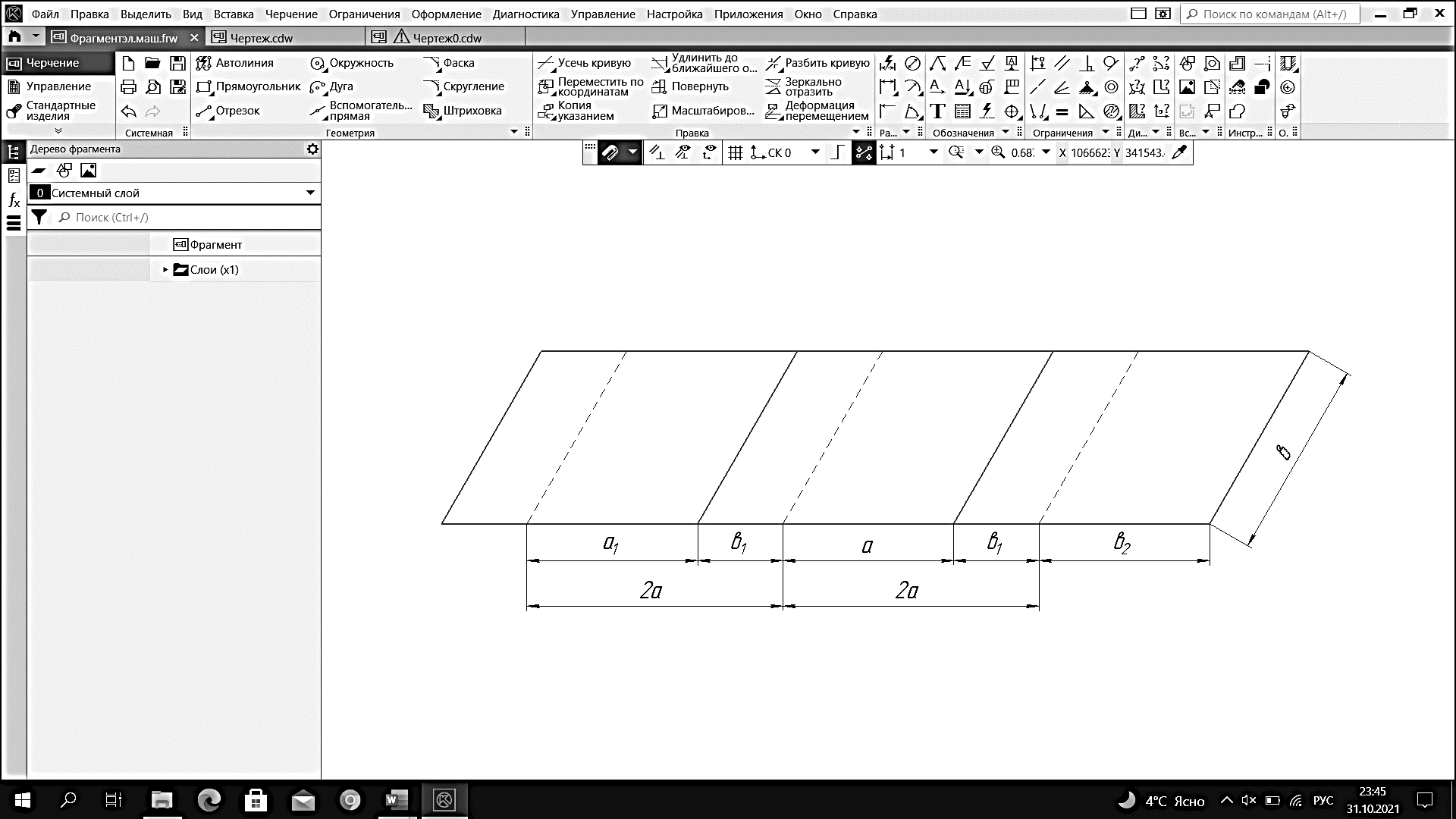 Рис.1 Рама 3о-3о тележки электровоза Перед началом расчета надо определить размеры (см. рис.1) Поперечный размер (b) принимают равным 2330 мм (по осям продольных балок) вне зависимости от ее конструкции в связи с ограничениями по габариту подвижного состава. База тележки (2а) зависят от диаметра тягового двигателя и класса тягового привода. В, В1, В2 и В3 – также выбирают исходя из необходимости размещения тягового и тормозного оборудования имеющие свои габариты. Так как большинство типов ЭПС имеют I и II класс привода, то ограничимся только их рассмотрением. Определим 2а для электровоза со II классом и осевой формулой 3о-3о (за образец взят ЧС4). В приводе II класса тяговый электродвигатель опирается на раму тележки, при этом редуктор остается опорно-осевым (редуктор одним концом опирается на ось к.п., а вторым через подвеску на раму тележки). 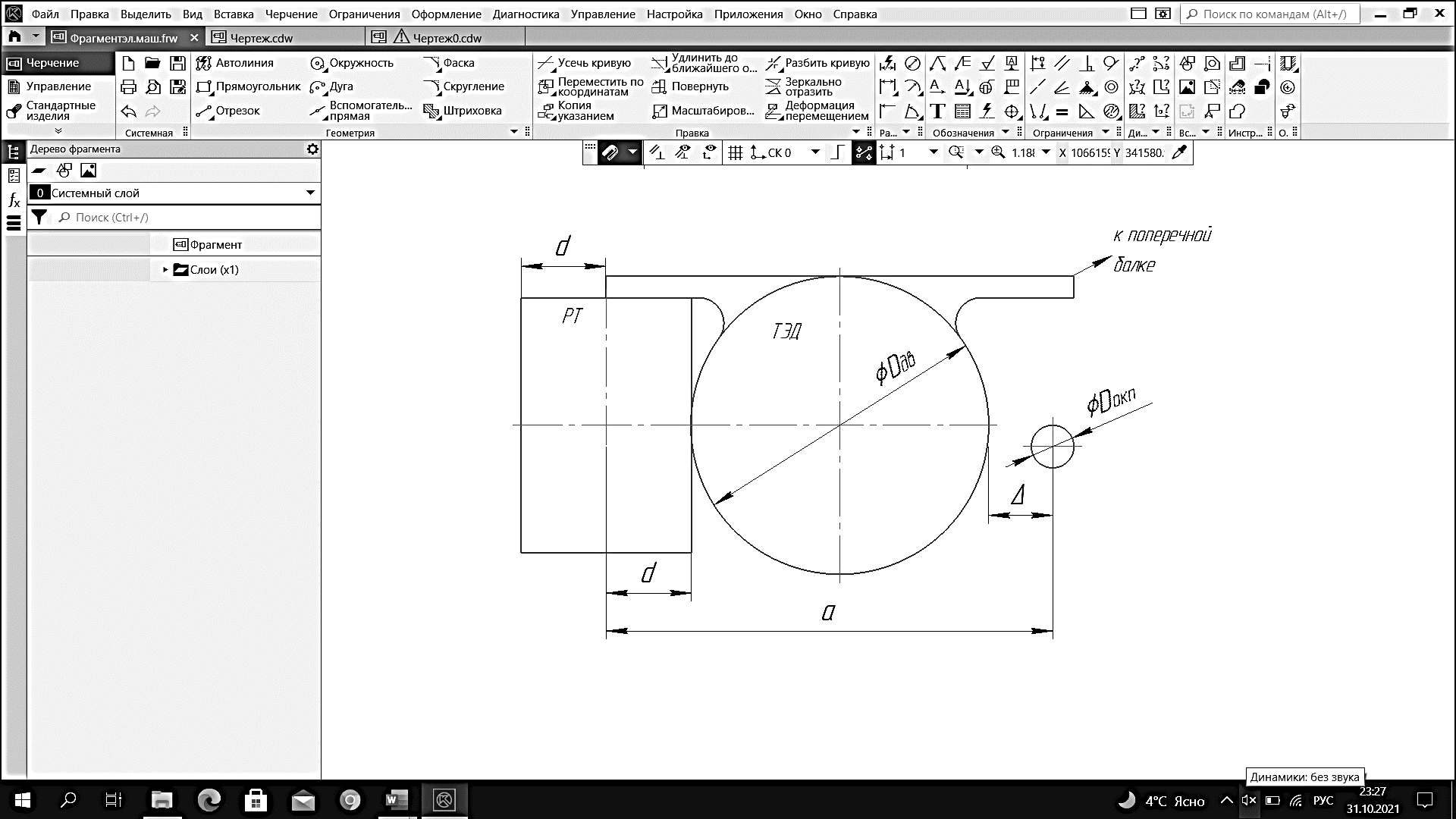 Рис.2 Схема привода электровоза На рис.2 приведены следующие обозначения: Dоси – диаметр оси колёсной пары – 220 мм; Dдв – диаметр остова тягового двигателя – 1100 мм;  - расстояние от остова ТЭД до центральной поперечной балки рамы тележки – 25 мм; - расстояние от остова ТЭД до центральной поперечной балки рамы тележки – 25 мм;d – половина ширины центральной поперечной балки – 125 мм; B1=900 мм Тогда:  (1.1) (1.1) = 1360 мм = 1360 ммВ2=а=1360 мм  мм ммРасстояния В, В1, В2 и В3 выберем из следующих диапазонов: В = 800÷1000 мм В1= 800÷1000 мм В2= а В3= 650÷950 мм Выберем для дальнейших расчетов в соответствии с заданием раму тележки электровоза. Данная рама будет иметь следующие размеры: 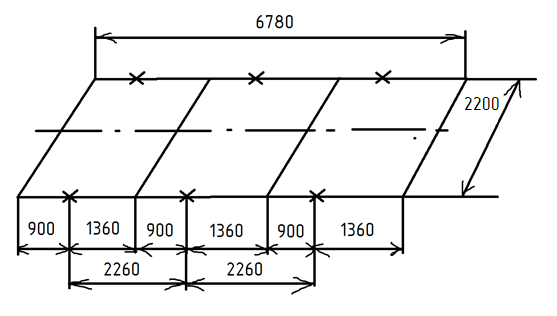 Рис.3 Рама 3-х осной тележки пассажирского электровоза 2. Расчёт массы кузова; составление весовой ведомости. Для определения массы кузова вычислим полную массу тележки. Масса тележки складывается из: Массы рамы тележки; Массы тяговых двигателей; Массы колесных пар с зубчатыми колесами; Массы тяговых передач; Массы рессорного оборудования; Массы тормозного оборудования; Масса рамы тележки в общем случае складывается из: - Массы продольных балок (боковин) = 120 кг/м - Массы поперечных балок = 180 кг/м - Массы шкворневых балок = 250 кг/м - Массы кронштейна. Её рассчитывают как 30% от массы боковин тележки. 2. Массу тяговых двигателей выбирают исходя из типа ТПС: - для II класса электровозов mтэд = 3000 кг 3. Масса колесной пары с зубчатыми колесами Для II класса электровозов принимается mкп=2800 кг 4. Масса тяговой передачи Для II класса электровозов принимается mтяг.п=500 кг 5. Масса рессорного подвешивания В первом приближении принимаем для всех типов ЭПС: - Масса кузовной ступени mк.р.п.=600 кг (на 1 тележку) - Масса буксовой ступени Mб.р.п= 80 кг (на 1 буксу) 6. Масса тормозного оборудования В первом приближении принимаем на одну тележку: mтор=600 кг Определим массу тележки грузового электровоза ЧС4, размеры которой были рассчитаны в 1 пункте. Рама тележки состоит из 2-х боковин, 2-х концевых и 2 шкворневой балок, а также кронштейн. Масса рамы тележки mрт=2  mбок + 2 mкон+2mшк+ 0,3 2 mбок (2.1) mбок + 2 mкон+2mшк+ 0,3 2 mбок (2.1)mрт= 2 120 6,780 + 2 180 2,2 + 2·250 2,2+ 0,3 2 120 · 6,780= 4007,36 кгТогда полная масса тележки электровоза: mт = mр.т + 2mтэд + 2mкп + 2mтяг.п + mкрп + 6mбрп + mтор (2.2) mт = 4007,36+3 3000+3 2800+3 500+600+6 80+600 =24587,36 кгМасса кузова mк=mэ-2mт mэ=  (2.2) (2.2)mэ=  =134498 кг =134498 кггде 2П – нагрузка, передаваемая от колесной пары на рельсы, 2П = 215 кН; nкп – число колесных пар, nкп = 6. Подставив значения в формулы, получим: mk=134498-2∙24587,36=85323,28 кг Весовая ведомость
Итого: Рт = 241,2 кН Рк=Рэ-2Рт=(mэ 9,81)/1000 – 2Рт = 837,02 кНследовательно, расчёты выполнены верно. 3. Разработка схемы нагрузки рамы тележки и расчет действующих на нее вертикальных сил. Действующие на раму тележки вертикальные статические силы определяются из весовой ведомости, а также на основе рабочих чертежей тележки. Эти силы (нагрузки) делятся на сосредоточенные и распределенные по длине. К первым относятся силы тяжести кузова, двигателей, реакции рессорного подвешивания и т.д. Ко вторым – силы тяжести элементов рамы. С достаточной степенью точности распределения нагрузки в данной задаче можно заменить сосредоточенными. При составлении схемы нагружения применяем следующие допущения: Силы тяжести элементов рамы тележки являются сосредоточенными нагрузками, приложенными в центре тяжести указанных элементов. Вес кузовной ступени рессорного подвешивания равномерно распределен в точках опирания кузова на тележку. Сила тяжести тягового двигателя приложен в точках его крепления к раме тележки (или часть этой силы, в зависимости от класса тягового привода). Вес тормозного оборудования и кронштейн считаем равномерно-распределенным по продольным и концевым балкам рамы, т.е. доли веса оборудования является сосредоточенными нагрузками, расположенными в центрах тяжести указанных балок. Схема нагружения рамы 3о-3о тележки грузового ЧС4 представлена на рис.6 Рассчитаем силы, действующие на раму тележки. 1) Вертикальная сила, действующая на боковину в центральной точке:  (7) (7)P1=7,98+  =9,76 кН =9,76 кН2) Вертикальная сила, действующая на концевую балку:  (7) (7)P2=3,88+ =5,66 кН3) Вертикальная сила, действующая на шкворневую балку:  (8) (8)P3=5,71+ =7,49 кН4) Вертикальная сила, действующая на раму тележки от опирания кузова и рессорного подвешивания. Так как в данном случае нагрузка на раму тележки является несимметричной, то для приведения системы в равновесие необходимо соблюдение ряда условий:  (9) (9) (10) (10)P41+P42+P43+P44=  +5,89=421,84 кН +5,89=421,84 кН5) Вертикальные силы, действующие в точках крепления тяговых электродвигателей к шкворневым балкам:  (11) (11) (12) (12) (13) (13)P5=  + + =15,94 кН =15,94 кНP6=  + + =29,91 =29,91 6) Сила реакции в буксовой ступени рессорного подвешивания:  (14) (14)R=  =48,53 кН =48,53 кНЗададимся расстояниями B4, B5, B6, B7, B8, B9 и lтэд. B4 = 150 мм. B5 = 1410 мм. B6 = 1200 мм. B7 = 2160 мм. B8 = 400 мм. B9 = 200 мм. lтэд = 830 мм. Определим неизвестные вертикальные силы Р41, Р42, Р43, Р44 исходя из статического равновесия тележки. Условия равновесия: 1) Сумма проекций на вертикальную ось всех сил равна нулю. Это условие выполнено при расчете реакции R. 2) Сумма моментов всех действующих на раму тележки сил относительно любой оси (оси, лежащей в горизонтальной плоскости) равна нулю. Для этого зададимся Р41:  (15) (15)P41=  + + =106,1 кН =106,1 кНЗапишем уравнения моментов относительно осей у и х:    Данные уравнения должны выполняться одновременно. Решив данную систему уравнений, получим: Р41 = 106,1 кН, Р42 = 109,66 кН, Р43 = 110,4 кН, Р44 = 95,68 кН. Будем считать, что полученное распределение нагрузок на 4 опоры возможно при применении опор с пружинами различной жесткости. Переведем миллиметры в метры, в окончательном виде получим схему нагружения (рисунок 5). 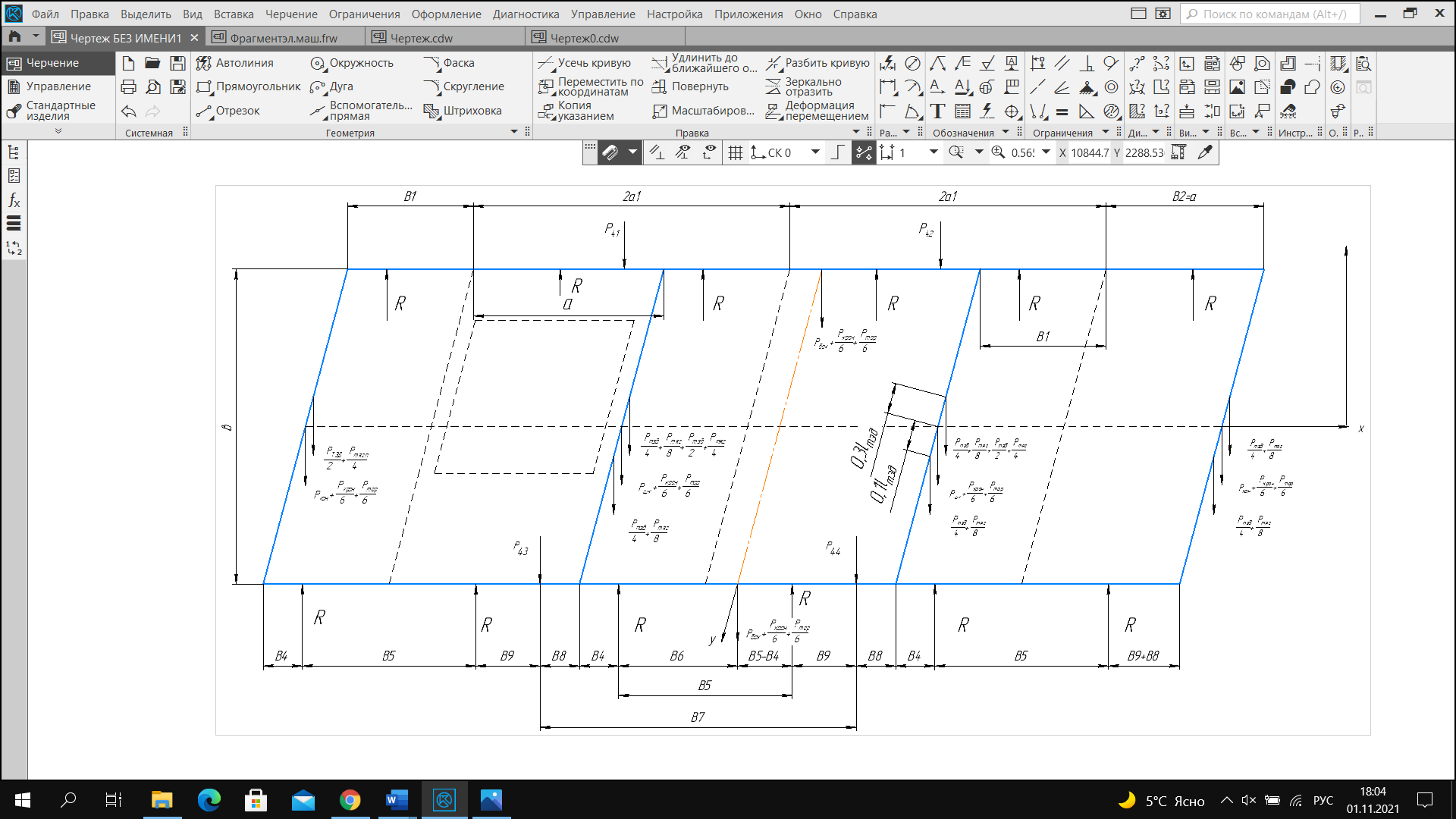 Рис.5 4. РАСЧЕТ РАМЫ ТЕЛЕЖКИ НА ПРОЧНОСТЬ МЕТОДОМ СИЛ ПОД ДЕЙСТВИЕМ ВЕРТИКАЛЬНОЙ СТАТИЧЕСКОЙ НАГРУЗКИ 4.1 ОБЩИЕ СВЕДЕНИЯ О РАСЧЕТЕ РАМЫ ТЕЛЕЖКИ МЕТОДОМ СИЛ Целью расчета на прочность является определение размеров элементов конструкции, при которых она не разрушается под действием приложенных нагрузок и имеет необходимый запас прочности. Расчет на прочность элементов включает в себя следующие этапы: Определение сил, действующих на рассматриваемый элемент в эксплуатации; Определение напряжений, возникающих в элементах от действия на него расчетных сил; Оценка прочности указанного элемента путем сопоставления действующих напряжений с соответственными прочностными характеристиками материала, из которого изготовлен данный элемент. Локомотив в целом и отдельные элементы его механической части в процессе эксплуатации подвергаются действию ряда нагрузок. При расчетах учитываются наиболее важные - расчетные нагрузки. К ним относятся весовые нагрузки, рассчитанные в пункте 2 и 3. Рамы тележек ТПС в общем случае можно рассматривать как пространственные стержневые системы с жесткими углами, загруженными пространственной нагрузкой. Такие системы статически неопределимы, т.е. в этих системах не все реакции и внутренние силы можно определить, используя лишь уравнение равновесия тела, т.к. они имеют лишние связи. За лишние связи принимают те связи, которые можно отбросить, чтобы получить систему статически определенную и геометрически неизменную. Количество лишних связей называют степенью статической неопределенности системы. Для расчета статической неопределенности системы широко применяют метод: сил; перемещений; смешанный; В методе сил – неизвестные силы, перемещений – перемещения, смешанном – частично силы, частично перемещения. Идея метода сил состоит в том, что расчет заданной статически неопределенной системы заменяют расчетом основной системы, в качестве которой принимается статически определенная и геометрически неизменяемая система, которая получается из заданной путем отбрасывания лишних связей. В основной системе внешние связи заменяются силовыми факторами (силами, моментами), неизвестными метода сил Xn. Чтобы основная система была эквивалентна заданной необходимо найти такие значения неизвестных X1, X2…Xn, при которых перемещения в основной системе по их направлению были равны заданным перемещениям. При неподатливых связях перемещения по их направлению в заданной системе равны нулю. Из этих условий получаем канонические уравнения метода сил для определения X1, X2…Xn:
 - единичное перемещение в основной системе по направлению безразмерной силы Xm = 1; - единичное перемещение в основной системе по направлению безразмерной силы Xm = 1; – перемещения в основной системе по направлению Xk от заданной внешней нагрузки. – перемещения в основной системе по направлению Xk от заданной внешней нагрузки.Значение перемещений  и можно определить по формуле Мора. и можно определить по формуле Мора.Вид выражений, по которым вычисляются коэффициенты и свободные члены зависит от того какие виды деформаций стержней принимаются во внимание. Например, если наблюдается кручение, сдвиг, сжатие:
где  – крутящий момент; – крутящий момент; , ,  – изгибающие моменты; – изгибающие моменты; , , – поперечные силы; – поперечные силы; – реакция от единичной силы; – реакция от единичной силы; , ,  – главные центральные моменты инерции относительно оси y и z; – главные центральные моменты инерции относительно оси y и z; – приведенный момент инерции поперечного кручения; – приведенный момент инерции поперечного кручения;S – площадь поперечного сечения;  , ,  – зависят от формы поперечного сечения; – зависят от формы поперечного сечения;Если стержень состоит из ряда прямых участков с равной жесткостью, то вычисление интеграла Мора можно упростить, т.к. эпюры от единичных обобщенных сил на прямолинейном участке стержня является линейными функциями координаты X. В этом случае используется способ Верещагина, в соответствии с которым:
где  – площадь эпюры от заданной нагрузки, которая может иметь произвольное очертание; – площадь эпюры от заданной нагрузки, которая может иметь произвольное очертание; - ордината единичной прямолинейной эпюры под центром тяжести грузовой эпюры. - ордината единичной прямолинейной эпюры под центром тяжести грузовой эпюры.Методом Верещагина интегрирование заменяется перемножением эпюр. Результат положительный, если обе эпюры расположены по 1 сторону и отрицательны, если находятся по разные стороны от неё. После определения коэффициентов и свободных членов канонических уравнений производится их решение и определяются неизвестные метода сил. После этого переходят к построению эпюр моментов в основной системе. Полученную эпюру называют окончательной Мсум. Для её построения используют принцип сложения моментов в рассматриваемой раме, а именно, её находят как сумму моментов от каждого неизвестного и от заданной нагрузки.
4.2 Выбор поперечных сечений балок рамы тележки Требование экономии металл и снижение массы ходовых частей с повышением конструкционных скоростей вызывает необходимость выбирать сечения с минимальным допустимым запасом прочности. Для снижения трудоемкости старались использовать готовые прокатные или штампованные балки, в основном швеллеры. Применение прокатных профилей снижает затраты на производство, но при одной и той же прочности балки ведет к увеличению веса рамы, вследствие худшего распространения металла по длине балки, по сравнению с рамами из штампованных профилей или сварных из листов. Исходя из всего разнообразия профилей, для расчета принимаем упрощенный профиль (рисунок 5): 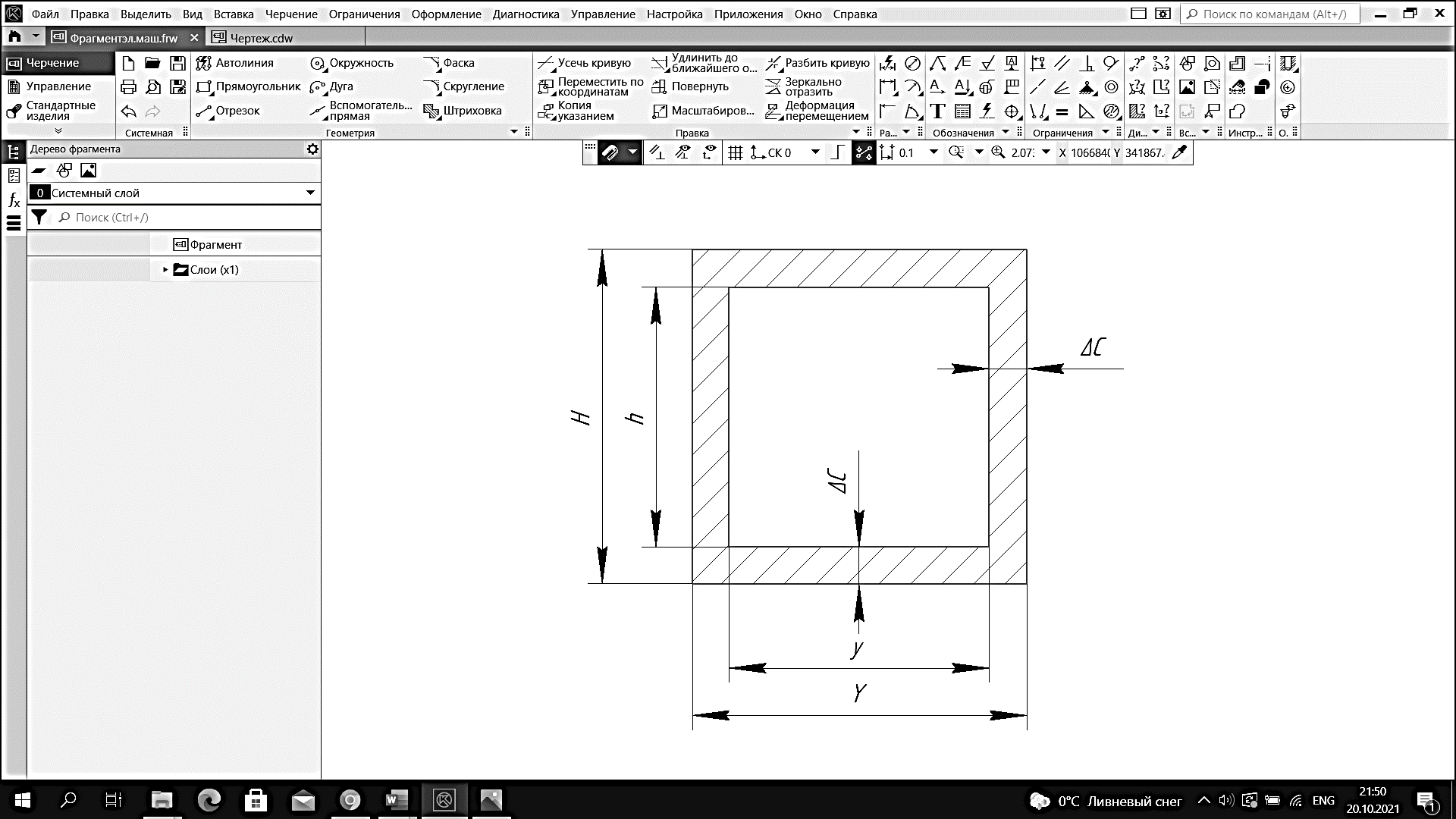 Рис.5 Схема профиля рамы На рисунке 5 размеры для электровоза ЧС4: - Продольная и концевая балки H = 400 мм Y = 220 мм ∆с = 14 мм h = H - 2∆c = 372 мм y = Y - 2∆c = 192 мм - Шкворневая балка H = 400 мм h = 372 мм Y = 2d = 2·200 = 400мм y = Y - 2∆c = 372 мм Воспользуемся формулой для расчета геометрических моментов инерции относительно осей y и z:
Приведенный геометрический момент инерции при кручении:
Продольные и поперечные балки:    Рассчитаем моменты инерции сечения для пассажирского электровоза: – продольные и концевые балки:    – шкворневая балка:    | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
 7,98
7,98