Лекции по схемотехнике ЭВМ. Лекция Базовые понятия цифровой электроники версия для печати и pda в лекции рассказывается о базовых терминах цифровой электроники, о цифровых сигналах, об уровнях представления цифровых устройств, об их электрических и временных параметрах
 Скачать 5.63 Mb. Скачать 5.63 Mb.
|

|
Рис. 9.24. Схема последовательного переключения входных каналов Второй пример, который мы рассмотрим, это схема, решающая обратную задачу - переключение входных каналов (рис. 9.24). Данная схема последовательно, циклически передает один из восьми входных сигналов на выход. Как и в предыдущем случае, перебор каналов осуществляется счетчиком, тактируемым сигналом с генератора. Непосредственно коммутация сигналов производится мультиплексором, на адресные входы которого подаются три разряда счетчика. Предусмотрена возможность начального сброса схемы с помощью сигнала "Сброс". В момент переключения каналов здесь также возможно искажение (обрезание) коммутируемых сигналов. Поэтому желательно обеспечить передачу сигналов в момент, когда переключения каналов нет. Или же надо останавливать процесс перебора каналов на время приема сигнала из выбранного канала путем запрета прохождения тактовых импульсов на вход счетчика, а затем снова запускать перебор каналов. Еще одно применение счетчиков из этой же области состоит в организации так называемой динамической индикации. Суть динамической индикации состоит в следующем. Если используется табло из нескольких индикаторов (одиночных светодиодов, светодиодных семисегментных индикаторов, светодиодных матричных индикаторов и т.д.), то совсем не обязательно все эти индикаторы должны гореть постоянно, одновременно. Можно зажигать их по очереди, что существенно сократит потребляемый всей схемой ток питания. Например, если в каждый момент времени горит только один индикатор из имеющихся восьми, то ток потребления индикаторов сократится в восемь раз. Учитывая, что каждый светящийся светодиод требует тока порядка 1–5 мА, такой подход может дать большой выигрыш, особенно при матричных индикаторах, содержащих несколько десятков светодиодов. А инерционность человеческого глаза приводит к тому, что вспышки света с частотой больше 20 Гц воспринимаются как непрерывное свечение. Так что при достаточной частоте перебора индикаторов глазу не будет заметно последовательное их включение. 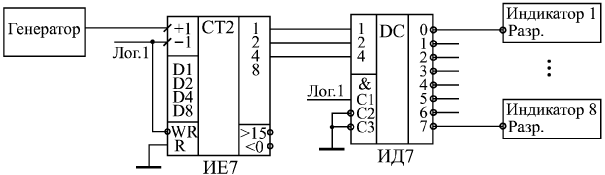 Рис. 9.25. Схема динамической индикации на восьми индикаторах На рис. 9.25 приведен пример схемы динамической индикации на восьми индикаторах. Для последовательного перебора индикаторов применяется счетчик, соединенный с дешифратором. Выходные сигналы дешифратора используются в качестве сигналов разрешения свечения для индикаторов. Частота сигнала тактового генератора, с которым работает счетчик, должна составлять не менее 160 Гц, чтобы каждый индикатор загорался не реже, чем с частотой 20 Гц. При этом нельзя также выбирать слишком большую частоту тактового генератора, так как в моменты переключения ток потребления микросхем сильно возрастает из-за паразитных емкостей, и при большой частоте весь эффект снижения потребления может сойти на нет. Счетчики часто используют также для организации всевозможных таймеров, часов, то есть схем счета времени, выходной код которых необходимо время от времени читать. Для этого на вход счетчика подается сигнал образцовой частоты с кварцевого генератора. Здесь возникает следующая проблема. Если чтение происходит в тот момент, когда счетчики переключаются, то с выходов счетчиков может быть считан случайный код, который не соответствует ни предыдущему установившемуся значению, ни последующему установившемуся значению. Можно, конечно, на время чтения кода остановить счет, но тогда ход часов собьется. 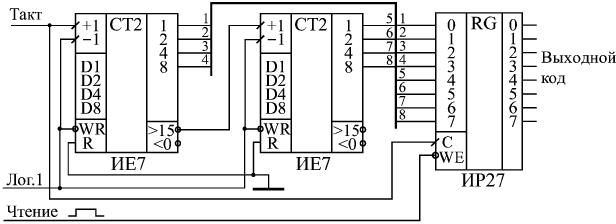 Рис. 9.26. Схема таймера с чтением выходного кода Пример решения данной проблемы приведен на рис. 9.26. Здесь выходной код счетчика на каждом такте записывается в выходной регистр с разрешением записи ИР27. А в момент чтения кода (при положительном сигнале "Чтение") запись в регистр запрещается. В результате в течение всей длительности сигнала "Чтение" выходной код схемы будет неизменным, хотя счетчик будет продолжать считать без всяких помех, и ход часов не собьется. Интересная особенность счетчиков ИЕ6 и ИЕ7 состоит в том, что они могут работать не только в режиме счета, но и в режиме повторителя входных сигналов данных. В режиме параллельной записи в счетчик при нулевом сигнале на входе –WR выходные сигналы счетчика будут повторять любые изменения входных сигналов данных, то есть счетчик работает по сути как регистр, срабатывающий по уровню стробирующего сигнала. В ряде случаев такая особенность очень удобна, так как она позволяет существенно упростить аппаратуру. Пусть, например, необходимо выдавать на вход схемы один из двух входных кодов: код со счетчика или код с регистра (то есть требуется мультиплексирование двух кодов). Эту задачу можно решить, применяя двухканальный мультиплексор (рис. 9.27а), а можно сделать проще - подавать код с регистра на входы данных счетчика и переводить в нужный момент счетчик в режим параллельной записи (рис. 9.27б). В обоих случаях переключение кодов, подаваемых на выход схемы, производится сигналом Упр. Правда, во втором случае счетчик возобновляет свой счет (после снятия сигнала записи –WR) с кода, записанного в регистр. Если это неприемлемо, то можно воспользоваться входом сброса счетчика в нуль R. 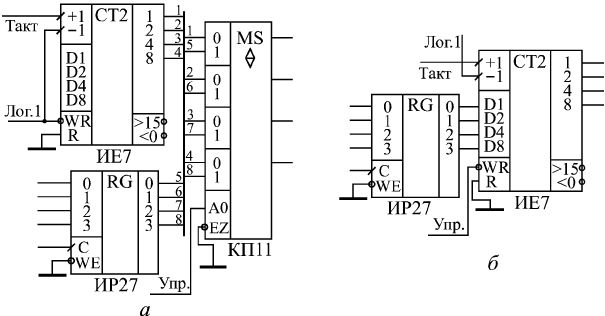 Рис. 9.27. Варианты мультиплексирования выходного кода счетчика с применением мультиплексора (а) и без него (б) И в заключение данного раздела мы рассмотрим две более сложные схемы, строящиеся на основе счетчиков. Это генератор прямоугольных импульсов с изменяемой частотой и длительностью импульса и быстродействующий высокоточный измеритель частоты входного сигнала с большим диапазоном измеряемых частот. Генерация прямоугольных импульсов - довольно часто встречающаяся задача, в частности при разработке, отладке, тестировании электронной аппаратуры. От генератора прямоугольных импульсов требуется выдача импульсов заданной длительности при заданной паузе между импульсами (или, что то же самое, формирование импульсов заданной длительности и частоты следования). Желательно, чтобы диапазон изменения длительности импульсов и пауз между ними был как можно шире. Желательно также, чтобы был предусмотрен режим разового запуска (то есть остановка генерации после окончания одного выходного импульса) и автоматического запуска (то есть генерация периодической последовательности импульсов до прихода внешней команды остановки). Предлагаемая здесь схема генератора не претендует, конечно, на рекордные характеристики, но она вполне может стать реальным удобным инструментом для разработчика цифровой аппаратуры, особенно если управление генератором поручить компьютеру с установленной на нем развитой сервисной управляющей программой. Благодаря своей простоте и наглядности, схема эта может служить образцом для разработки более сложных генераторов импульсов, например, имеющих более высокое быстродействие, больший диапазон изменения длительности импульсов и их частоты, обеспечивающих генерацию импульсов с разной амплитудой и полярностью. 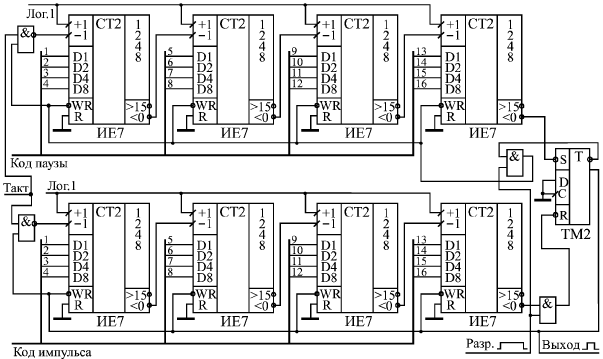 Рис. 9.28. Счетчики длительности импульса и паузы для генератора прямоугольных импульсов В основе генератора (рис. 9.28) - два 16-разрядных счетчика, выполненных на основе микросхем ИЕ7. Один из этих счетчиков (на рисунке внизу) отсчитывает длительность выходного импульса, другой (на рисунке вверху) - длительность паузы. Коды длительности импульса и паузы подаются, соответственно, на входы данных верхнего и нижнего счетчиков (эти коды могут храниться, например, в регистрах, не показанных на схеме). Счетчики импульса и паузы работают по очереди, что определяется управляющими сигналами на их входах параллельной записи –WR, которые также запрещают прохождение на входы -1 тактовых импульсов с помощью элементов 2И-НЕ. Эти управляющие сигналы поступают с прямого и инверсного выходов триггера ТМ2, на входы –R и –S которого подаются сигналы переноса с выходов < 0 обоих счетчиков. В результате, когда один счетчик считает, другой находится в режиме параллельной записи и не считает. После того как считающий счетчик досчитает до нуля, он перебросит выходной триггер, который переведет этот счетчик в состояние параллельной записи, запретит поступление на его вход тактовых импульсов и разрешит считать другому счетчику. Описанная последовательность действий повторится уже для другого счетчика. И этот процесс будет повторяться до тех пор, пока разрешена генерация. В данном случае смело можно одновременно использовать как вход –R, так и вход –S триггера, поскольку сигналы, приходящие на них, гарантированно разнесены во времени. Сигнал с прямого выхода триггера служит выходным сигналом всего генератора в целом. Разрешается генерация положительным сигналом "Разр". Когда генерация запрещена (нулевой сигнал "Разр."), триггер сброшен в нуль по входу –R и оба счетчика находятся в состоянии параллельной записи. Поэтому генератор всегда начинает работу с отработки паузы заданной длительности, а потом отрабатывает выходной импульс заданной длительности. Сформулируем условия правильной работы данной схемы. Во-первых, как и в случае управляемого делителя частоты (см. рис. 9.13), перевод счетчиков из режима счета в режим параллельной записи осуществляется передним (отрицательным) фронтом тактового отрицательного импульса, а счет производится задним (положительным) фронтом отрицательного тактового импульса. Поэтому отрицательный тактовый импульс должен быть достаточно коротким. Один и тот же тактовый импульс не должен своим передним фронтом менять режим счетчиков, а задним фронтом переключать счетчики по входу –1. Длительность тактового отрицательного импульса не должна превышать полного времени переключения режимов счетчиков, включающего в себя четыре задержки переноса счетчиков, задержку переключения выходного триггера и задержку элементов 2И и 2И-НЕ. Во-вторых, частота тактового сигнала не должна быть слишком большой, чтобы за время переключения режимов на вход -1 не пришел еще один положительный фронт тактового сигнала. Иначе этот фронт будет потерян. То есть от момента отрицательного фронта тактового импульса до момента положительного фронта следующего тактового импульса схема должна успеть полностью закончить переключение режимов счетчиков. Пусть, например, мы хотим выбрать максимальную тактовую частоту 10 МГц (период ТТ = 100 нс). Посмотрим, можно ли использовать микросхемы счетчиков серии КР1533. Для счетчиков КР1533ИЕ7 задержка сигнала переноса составляет не более 18 нс. Для четырех микросхем задержка переноса составит 72 нс. Тогда на сумму задержек триггера, элемента 2И и элемента 2И-НЕ остается не более 28 нс. Следовательно, если мы возьмем эти элементы из более быстрых серий (например, КР531 или КР1531), мы легко удовлетворим этому требованию. При величине кода импульса N длительность импульса ТИ составит (N+1) • ТТ. При величине кода паузы М длительность паузы ТП составит (М+1) • ТТ. Период выходных импульсов ТВЫХ будет равен (M+N+2) • ТТ. Коды M и N могут принимать значения от 0 до 65539. То есть минимальная длительность импульса и паузы равна ТТ, максимальная длительность импульса и паузы равна 65536 ТТ, минимальная длительность периода выходного сигнала равна 2ТТ, а максимальная - 131072 ТТ. Например, при тактовой частоте 10 МГц максимальный период выходного сигнала будет равен 13,1072 мс, а минимальный - 200 нс. Для расширения диапазона изменения периода выходного сигнала можно применить управляемый делитель тактовой частоты. Другой возможный путь - наращивание разрядности счетчиков - приводит к снижению максимально допустимой тактовой частоты, так как обязательно вызывает увеличение задержек переключения счетчиков. К тому же, как правило, нет необходимости задавать длительность периода выходного сигнала, скажем, в 1 секунду с абсолютной погрешностью 100 нс (относительная погрешность - 10–7). Гораздо важнее обеспечить стабильность частоты и периода выходного сигнала. Поэтому применение управляемого делителя частоты тактового сигнала не ухудшает характеристик генератора. Схема управления генератором прямоугольным импульсом с делителем частоты показана на рис. 9.29. Делитель частоты работает с кварцевым генератором с частотой 10 МГц и включает в себя три делителя на 16 на счетчиках ИЕ7. На выход мультиплексора (сигнал "Такт") проходит один из сигналов с периодом 100 нс, 1,6 мкс, 25,6 мкс, 409,6 мкс. Длительность сигнала "Такт" не превышает половины периода сигнала с частотой 10 МГц, то есть 50 нс, что обеспечивает правильную работу счетчиков импульса и паузы (см. рис. 9.28). Выбор тактовой частоты осуществляется 2-разрядным кодом частоты. При запрете генерации все счетчики сбрасываются в нуль, это увеличивает точность привязки момента начала генерации к моменту подачи команды на начало генерации. 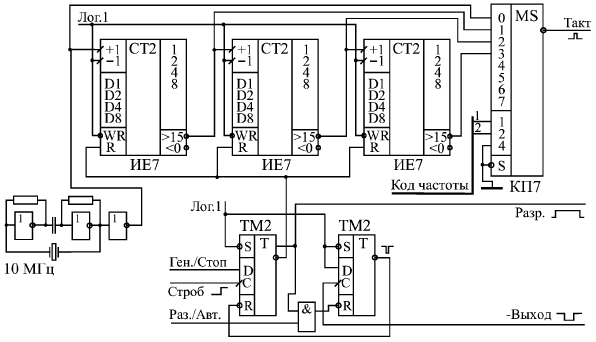 Рис. 9.29. Схема управления и делитель частоты для генератора прямоугольных импульсов Схема управления генератором прямоугольных импульсов, также показанная на рис. 9.29, включает в себя два триггера ТМ2 и логический элемент 2И (ЛИ1). Левый по рисунку триггер вырабатывает сигнал разрешения генерации "Разр". В этот триггер необходимо записать единицу для разрешения генерации или нуль для остановки генерации. Запись в триггер входного сигнала Ген./Стоп производится передним фронтом сигнала "Строб". Правый по рисунку триггер служит для организации разового запуска генератора. Переключение режима разового или автоматического запуска производится управляющим сигналом "Раз./-Авт". При автоматическом запуске (нуль на входе Раз./-Авт.) данный триггер не работает, он всегда находится в нулевом состоянии и дает уровень логической единицы на своем инверсном выходе. При разовом запуске (единица на входе Раз./-Авт.) правый триггер переходит в рабочий режим сразу после начала генерации (положительный сигнал "Разр."). После окончания генерации первого выходного импульса на инверсном выходе генератора (инверсный выход триггера на рис. 9.28) появляется положительный перепад, который перебрасывает правый триггер на рис. 9.29. В результате он своим выходным сигналом сбрасывает левый триггер, что приводит к остановке генерации (так как сигнал "Разр." становится нулевым). После этого схема снова готова к разовому запуску генерации. Временные диаграммы работы схемы в режимах автоматического и разового запуска показаны на рис. 9.30.  Рис. 9.30. Режимы работы генератора импульсов: автоматический (а) и разовый (б) Асинхронность (независимость) момента прихода команды на начало передачи и сигнала задающего кварцевого генератора приводит к тому, что длительность первой паузы может оказаться на 100 нс меньше, чем она задана кодом паузы. Но это не слишком существенно, так как гораздо важнее длительность выходного импульса. Все последующие импульсы и паузы выдерживаются точно. Абсолютная погрешность установки длительностей импульса и паузы ТИ и ТП составляет половину периода тактового сигнала ТТ. Относительная погрешность установки этих величин составляет, соответственно, 0,5/N и 0,5/M. Понятно, что при малых величинах N и M погрешность будет большой (в пределе - даже 50%). Но при больших величинах длительностей импульса и паузы относительная погрешность не превышает 0,5/4096, то есть 0,012%. Таким образом, рассмотренный генератор может формировать импульсы длительностью от 100 нс с паузой между импульсами от 100 нс. Максимально возможная длительность импульса составляет 216 • 212 • 100 нс = 26,84 с. Такой же может быть и пауза. Правда, отношение длительности импульса к длительности паузы (или длительности паузы к длительности импульса) не может превышать 65536. Величина периода выходного сигнала генератора может достигать 53,69 с. Теперь рассмотрим вторую схему. Задача измерения частоты следования входных прямоугольных импульсов также часто встречается как в чисто цифровых, так и в аналого-цифровых системах. Как уже упоминалось, существует два традиционных метода измерения частоты (рис. 9.31): один предполагает измерение периода TВХ путем подсчета тактовых импульсов с периодом TT в течение TВХ и дальнейшее вычисление частоты по формуле fВХ = 1/TВХ (а), а другой прямо измеряет частоту fВХ путем подсчета входных импульсов в течение временного окна tO (б). Относительная погрешность и того, и другого метода не превышает величины 1/N, где N - полученный в результате подсчета код. Понятно, что первый метод дает хорошую точность только для низких частот fВХ (то есть для больших TВХ и соответственно больших N). Второй метод дает хорошую точность только для больших частот fВХ или в случае большого временного окна tO (то есть для больших N). В первом случае для увеличения точности необходимо увеличивать тактовую частоту, во втором - увеличивать длительность временного окна. 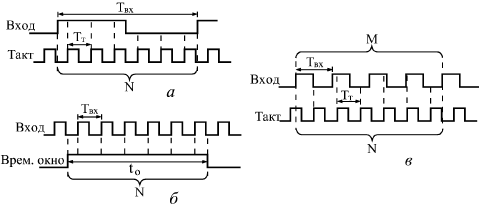 Рис. 9.31. Методы измерения частоты: через период (а), прямой (б) и комбинированный (в) Время измерения частоты по первому методу составляет TВХ. Для второго метода оно постоянно и равно длительности временного окна tO. Поэтому желательно было бы соединить достоинства обоих методов, чтобы частота fВХ измерялась бы достаточно быстро и с заданной точностью (с погрешностью, не меньшей заданной). Это возможно при использовании комбинированного метода (рис. 9.31в). При данном методе импульсы тактовой частоты с периодом TT подсчитываются в течение М полных периодов входного сигнала. При этом количество сосчитанных импульсов N определяет точность измерения (относительная погрешность не превышает 1/N). Значит, необходимо обеспечить, чтобы N было достаточно большим, например, при N>100 относительная погрешность не превысит 1%, а при N > 1000 она будет меньше 0,1%. Обеспечить достаточную величину N можно простым выбором числа М. Недостаток данного комбинированного метода состоит в том, что измеренное значение частоты необходимо вычислять. Так как при этом методе выполняется равенство МTВХ = NTT , следовательно, fВХ = M/(NTT). Однако при использовании компьютера или микроконтроллера такое вычисление не представляет особого труда. Зато данный комбинированный метод позволяет измерять частоту входного сигнала в широком диапазоне быстро и с заданной точностью. Поэтому мы подробно рассмотрим практическую реализацию именно этого метода. 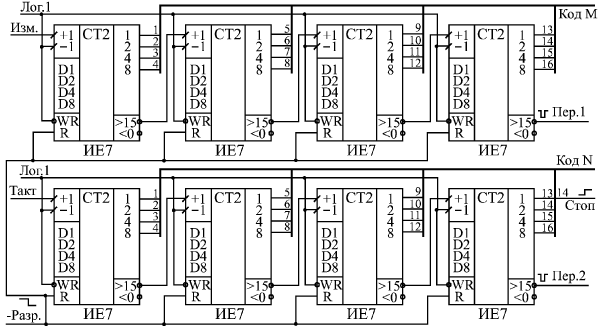 |