2.основы теории механизмов и машин. Механизмы машин механизм
 Скачать 5.04 Mb. Скачать 5.04 Mb.
|

|
Смазочные материалы
Основными параметрами, определяющими выбор вида смазочного материала, являются величины скорости относительного перемещения трущихся тел V и нормального давления ра. Обобщенные рекомендации по выбору вида смазки отображены на диаграмме (Рис.2.20). 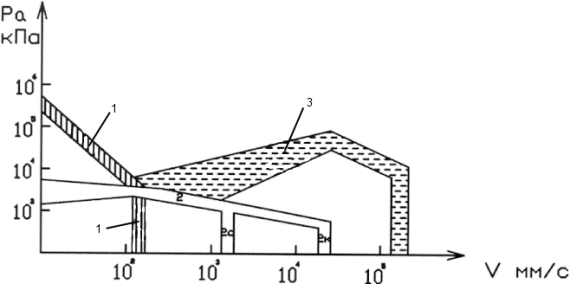 Рис. 2.20. Диаграмма выбора типа смазочного материала по А.Р. Лансдауну: твердых, 2 - пластичных, 2с- для подшипников скольжения 2к- для подшипников качения; 3 -жидких, Ра- нормальное давление в контакте V- скорость относительно перемещения контактных тел Жидкие смазочные материалы (масла) представлены базовыми маслами, обычно на основе нефтяного сырья, включающими ряд присадок, повышающих их качество. Их разделяют на группы: моторные (универсальные, карбюраторные, дизельные) имеющие в сравнении с другими повышенные значения кинематической вязкости. В зависимости от вязкости масел (ν20ºС=50÷800мм/с в сравнении с водой у которой ν20ºС=1мм/с) моторные масла делят на классы ГОСТ 14479.3.-85. Выделяют: - зимние с ν100ºС=3,8÷5,6мм2/с: 33; 43; 53; 63; - летние с повышенным значением ν до 26,1 мм2/с: 8÷24 - всесезонные ν100ºС 7,0÷9,3 до 14,5÷16,3 мм2/с класс вязкости которых указан дробью 33/8; 43/6;… 63/16. В зависимости от области применения моторные масла делят на группы и подгруппы, выделяя отдельно масла для карбюраторных двигателей и дизельных. Моторные масла обозначают буквой М с указанием вязкости, эксплуатационных свойств и сезонности применения. Например: М- 63/16 – В – моторное масло 63/10 вязкости для среднефорсированных карбюраторных и дизельных двигателей. Трансмиссионные масла (ТМ) используют для смазки узлов механических и гидродинамических и гидрообъемных передач. В зависимости от вязкости υ100º = 6÷10,99 до 25÷41 мм2/с их делят на четыре класса, а по эксплуатационным свойствам, определяемым конструкцией передач и уровнем контактных давлений (от 900 до 3000 МПа и выше), на 5 групп, определяющих их предпочтительные области применения. Масла различного назначения. Гидравлические масла (рабочие жидкости гидросистем). Вязкость рабочих жидкостей гидропривода составляет 30…40 мм2/с. Они обладают повышенным индексом вязкости благодаря чему эффективно применяются в широком диапазоне температур. В СМ работающих на открытом воздухе в диапазоне температур - 40÷ + 40 ºС используют обычно следующие сорта специальных рабочих жидкостей: МГ – 30 (летние) и ВМГЗ – всесезонные. Режимы эксплуатации гидромашин: кратковременный, длительный, устанавливают с учетом вязкостно-температурных характеристик рабочих жидкостей. Компрессорные масла применяются для смазки узлов и деталей компрессоров. Требования к ним близки требованиям моторных масел. Турбинные масла предназначены для смазывания и охлаждения в турбинах, воздуходувках, электрогенераторах. Их вязкость должна обеспечивать образование защитной пленки на поверхностях контактируемых деталей. (ν50ºС =22÷57 мм2/с). Пластические (консистентные) смазки в виде густых мазей, прилипающих к рабочим поверхностям деталей применяют в тех случаях, когда трудно обеспечить герметизацию узла трения жидкой смазки. Их используют для смазывания открытых шестерен, подшипников, грузоподъемных канатов. В состав пластичных смазок как минимум входят два компонента: масло (дисперсионная среда) и загуститель (дисперсионная фаза). Последняя образует структурный каркас, определяющий свойства смазки.
Триботехническая надежность подшипников Применительно к подшипникам скольжения применяют разные критерии оценки режимов работы в зависимости от вида реализуемого в них трения. Для подшипников скольжения сухого и полужидкостного трения основным критерием является тепловой, вызванный взаимодействием цапфы вала и подшипника через микронеровности контактируемых поверхностей. При этом основными видами отказов являются абразивное изнашивание, усталостное разрушение и пластическое деформирование поверхностных слоёв. В качестве оценочного параметра указанного критерия принят комплексный параметр в виде произведения: удельная нагрузка от действия приведенной силы радиального направления (р) на окружную скорость цапфы (V), пропорциональной затратам мощности, расходуемой на трение. Для жидкостных подшипников скольжения основным условием реализации гидродинамического режима работы является исключение механического взаимодействия поверхностей вала и подшипника при необходимой минимальной толщине масляного клина, за счёт создания соответствующего значения подъёмной силы (Рис.2.21). 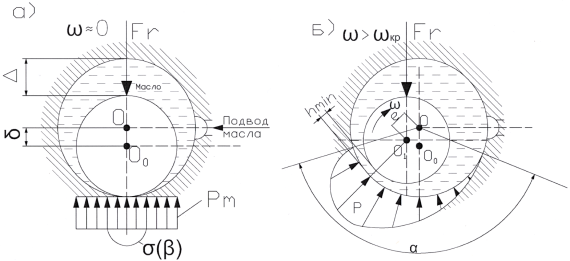 Рис. 2.21. Жидкостные подшипники: а) статический режим ω=0; б) динамический режим ω>ωкр Естественно, что с уменьшением угловой скорости вращения вала или увеличением удельной нагрузки р минимальная толщина масляного клина hmin уменьшается, приближаясь к критической величине hкр, при которой микронеровности вала и подшипника соприкасаются. Нормальный режим работы характеризуют коэффициентом запаса nэ = hmin/hкр, рациональное значение которого принимают 1,2÷1,5 для шероховатостей вала не выше 2,5 мкм и подшипника не выше 5,0 мкм. Допустимая область работы гидродинамических подшипников для нормальных температурных режимов лежит в диапазоне,
Основным видом отказа подшипников качения является усталостное выкрашивание беговых дорожек и тел качения, вызванное действием переменных контактных напряжений. Расчёт последних проводят по формулам Герца по значению радиального усилия с учётом неравномерности загрузки всех тел качения.
Выбор подшипников качения производят по их расчётной динамической грузоподъёмности: где R – приведенная к (радиальной) нагрузка, действующая на подшипник, определяемая с учётом их работы в эксплуатационных условиях по специальной методике; L – расчётный ресурс в млн. оборотов; q – коэффициент учёта формы тел качения; q =3 – для шарикоподшипников; q =3,3 – для роликоподшипников. При эксплуатации строительной техники следует иметь в виду следующее: – на усталость материала подшипников значительное влияние оказывает характер действия нагрузки, термическая обработка материала подшипников, класс чистоты обработки поверхностей, наличие и вид смазки, а также размерные отклонения деталей, даже в пределах установленных допусков; – загрязнение подшипников приводит к быстрому развитию абразивных явлений, значительно снижающих ресурс в сравнении с оценкой его по критерию усталости. 2.3. Динамика и прочность машин Здесь рассмотрен спектр вопросов механики, обеспечивающий реализацию СМ рабочих и транспортных режимов работы при высокой степени надежности и комфортности.
 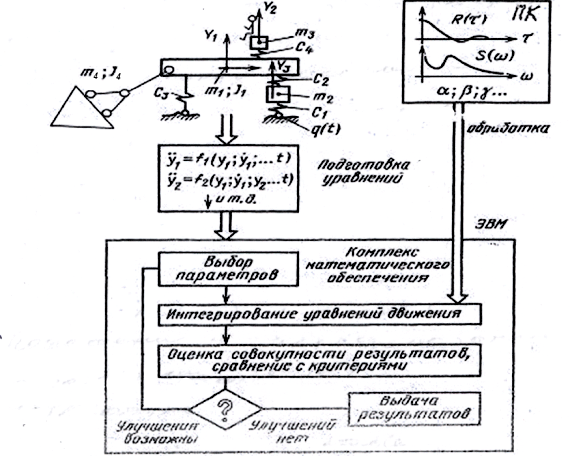 Рис. 2.22. Схема аналитического исследования динамики землеройно-транспортных машин Основы тяговой динамики машин
Давая оценку эффекта сцепления движителей машины с основанием, используют значение коэффициента сцепления φсц, через который выражают возможное значение силы тяги по условию сцепления: где Gсц -сцепной вес машины, рассматриваемый в виде вертикальной реакции поверхности передвижения, действующей на движители, к которым осуществляется подвод крутящего момента от привода. Его определяют как: где ξ – коэффициент использования сцепного веса. Gм - сила тяжести машины Силу тяги, которую может создать привод машины, на движителе называют силой тяги « по двигателю». Её называют касательной силой тяги и определяют по выражению: где M - номинальный момент двигателя, r –радиус колеса для колёсных машин или ведущей звёздочки для гусеничных. Реально реализуемое значение тягового усилия в общем случае является минимальным из двух приведённых выше: При движении машины в транспортном режиме она преодолевает ряд сопротивлений, направленных вдоль оси её движения, качению Wf, подъёму трассы Wh, ветровой нагрузке Ww, разгону Wj. Уравнение равновесия машины вдоль оси её движения называют тяговым балансом и записывают обычно в удельной форме (к силе тяжести машины ):
где знаки «+» соответствуют режиму подъёма и разгона с ускорением j, а знаки «-» - спуска и торможения. Левая часть этого уравнения, зависящая только от конструктивных параметров машин, получила название: - динамического фактора машины (Dm), рассчитываемого для скоростных режимов движения, формирующих значимое значениеWw - сцепного фактора, при малых скоростных режимах, когда Ww ≈ 0; P=Pцс: Значение динамического и сцепного факторов определяются скоростными режимами движения машины и степенью её загрузки. В правой части (2.1) представлены характеристики, определяющие режим движения: - сопротивления качению машины f, зависящее от параметров ходовой части и поверхности движения; -крутизны трассы i; -удельное (к ускорению свободного падения g) ускорение разгона (замедление торможению). Степень загрузки оценивают коэффициентом использования машины по грузоподъёмности 0 ≤ KГ ≤ 1,0. При грузоподъёмности gmсила тяжести загруженной машины, с коэффициентом KГ составит: Значение динамического фактора при произвольном KГ:
Значение сцепного фактора при произвольном KГ:
где индекс 1,0 означает что значение фактора D и Dсц соответствует KГ = 1; G0 - сила тяжести машины при KГ = 0. Семейство графиков, отражающих функциональные зависимости динамического фактора, при KГ = 0, от скорости движения машины при всех передачах коробки перемены передач (КПП) в виде D1,0=D(Vj), называют динамической характеристикой машины. Семейство графиков, отражающих зависимости (2.2) и (2.3) называют нагрузочными характеристиками, соответственно, динамического и сцепного факторов. Их точки пересечения соответствуют предельным скоростным режимам, реализуемым без буксования (Рдв=Рсц). Совокупность указанных характеристик - динамический паспорт машины. На рис.2.23 представлен динамический паспорт машины с механической трансмиссией имеющей КПП с четырьмя передачами I÷IV. 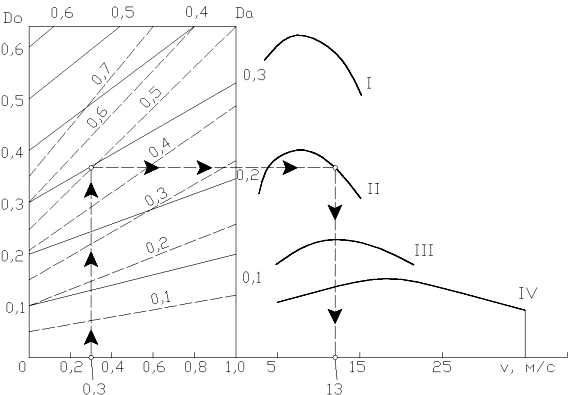 Рис. 2.23. Динамический паспорт автомобиля составляют из динамической характеристики с номограммой нагрузок, графика контроля буксования и динамических показателей Он даёт полную картину о возможных скоростных режимах движения машины при различных значениях степени её загрузки и позволяет оценить режимы буксования: Dсц Так, при коэффициенте загрузки равном 0,30 возможен режим движения на II-ой передаче со скоростью 13 км/ч. При этом будет отсутствовать режим буксования, т.к. Dсц=D. Для СМ, являющихся технологическими, важные значения имеет свободная тяга (T0). Под ней понимают разность между тяговым усилием и суммарным сопротивлением качению и подъему трассы, которое может быть реализовано на преодоление технологических сопротивлений при выполнении рабочих операций. |