Министерство образования РФ сибирский государственный технологический университет
 Скачать 1.32 Mb. Скачать 1.32 Mb.
|

3.4 Оценка качества переходного процессаПо полученной переходной характеристике скорректированной системы произведем оценку качества переходного процесса. 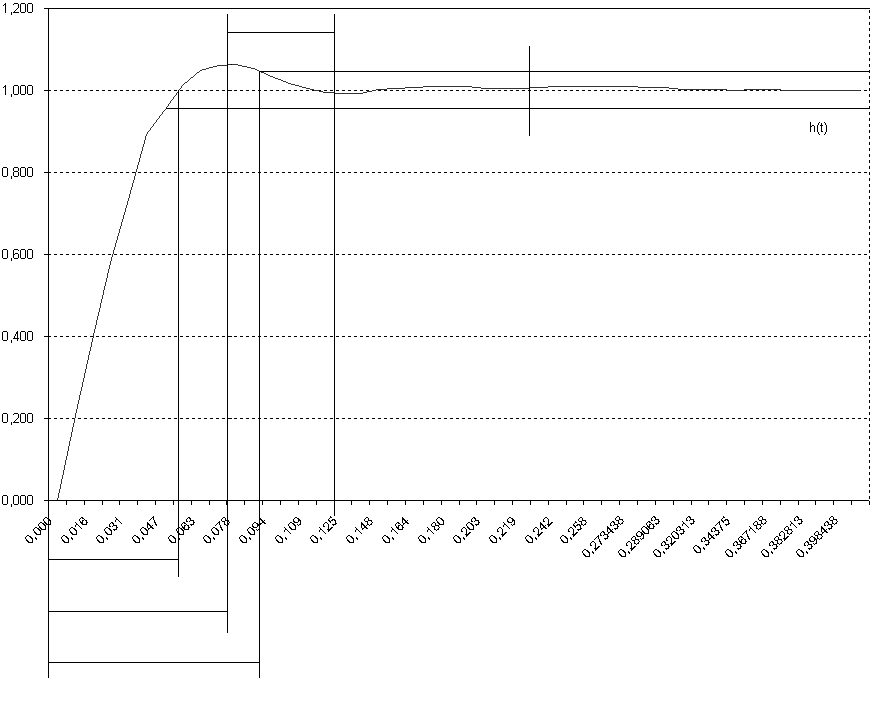 Рисунок 19 - Показатели качества регулирования На рисунке 19 приняты следующие обозначения: hmax(t) максимум переходной характеристики; hycт(t) - установившееся значение переходной характеристики; Для определения показателей качества регулирования примем Найдем прямые оценки качества регулирования непосредственно из графика: hmax1(t) = 1,062 – первое максимальное значение переходной функции; hmax2(t) = 0,992 – второе максимальное значение переходной функции; Используя прямые оценки качества регулирования, найдем остальные показатели качества регулирования. Частоту колебаний найдем по формуле определив по графику Перерегулирование найдем согласно формуле подставив численные значения, получим Декремент затухания определим как а, подставив численные значения, найдем Статическая ошибка, определяемая согласно формуле будет равна 4 Выбор корректирующего устройства Корректирующие устройства систем регулирования осуществляют преобразование сигнала управления. С этой целью их составляют из элементов, которые удобно называть преобразовательными. 1) Строим ЛАЧХ последовательного корректирующего устройства (рисунок 20 ), для которой справедливо соотношение: Lк() = Lж() – L0() 2) Исходя из ЛАЧХ корректирующего звена, выбираем принципиальные схемы и передаточные функции корректирующих звеньев, состоящих из пассивных четырёхполюсников постоянного тока. Это электрические цепи из резисторов и конденсаторов.  Рисунок 20 – ЛАЧХ корректирующего устройства По передаточной функции корректирующего устройства подберем подходящую схему пассивного четырехполюсника. Представим передаточную функцию корректирующего устройства в виде  Рисунок 21 – ЛФЧХ корректирующих устройств где Для реализации передаточной функции 1-го четырехполюсника выберем четырехполюсник, схема и логарифмическая характеристика которого, изображены на рисунке 22.  Рисунок 22 – Четырехполюсник для реализации 1-го звена корректирующего устройства Для реализации передаточных функций 2-го, 3-го и 4-го четырехполюсника выберем четырехполюсник, схема и логарифмическая характеристика которого, изображена на рисунке 23.  Рисунок 23 Четырехполюсник для реализации 2-го, 3-го и 4-го звена корректирующего устройства 4.1 Принципиальная схема корректирующего устройстваКонечную схему представим как сумму более простых, последовательно соединенных пассивных четырехполюсников разделенных усилителями (рисунок 24). Поскольку пассивные четырехполюсники уменьшают коэффициент передачи системы, необходимо в цепь ввести дополнительные усилители с коэффициентом усиления, где  Рисунок 24 – Схема корректирующего устройства 4.2 Расчет параметров корректирующего устройстваПри расчете параметров корректирующего устройства будем руководствоваться следующими рекомендациями: - необходимо учитывать входное сопротивление последующего элемента; - не следует выбирать пассивный четырехполюсник с передаточным коэффициентом меньше 0,05-0,1; - не следует в одной схеме иметь сопротивления (или емкости), на два три порядка различающихся друг от друга; - не следует выбирать конденсаторы большой емкости, более (50 100) мкФ. Зададим значения Расчет элементов корректирующего устройства будем проводить согласно формулам где Подставив численные значения, получим значения параметров, которые сразу приведем к стандартным значениям Заключение В данной курсовой работе мы провели исследования на устойчивость линейной АСР по различным критериям. Из исследований видно, что АСР находится в не устойчивом состоянии. А так же был проведен расчет последовательного корректирующего устройства и построение переходного процесса автоматической системы регулирования по заданным показателям качества. Из графика временной характеристики видно, что данная система соответствует заданным показателям качества (время регулирования системы Список использованных источников 1. Теория автоматического управления/Под редакцией А.А.Воронова – ч.1 и ч.2.- М.: Высшая школа, 1986. – 376с и 504с. 2. Теория автоматического управления: Методическое указание к выполнению курсовых работ для студентов специальности 21.02 всех форм обучения./Составитель Дорошенко В.А., Захаров М.И и др. – Красноярск: СТИ, 1991. – 24с. 3. Попов Е.П. Теория линейных систем автоматического регулирования. – М.: Наука, 1978. – 250с. |