Теоретический аспект обледенения воздушных судов. Диплом Зимогорский П-10-7. Министерство транспорта российской федерации федеральное государственное бюджетное образовательное учреждение
 Скачать 6.18 Mb. Скачать 6.18 Mb.
|

1.11 Пример применения спецификаций RNAV и RNP на маршрутах ОВД и в схемах полета по приборам Рисунок 6 – Использование спецификаций RNAV и RNP в полете Навигационные спецификации ИКАО не предусматривают всех требований, которые могут быть предписаны для выполнения полетов в конкретном воздушном пространстве, по маршруту или в конкретном районе. Такие дополнительные требования указываются в других документах, таких как эксплуатационные правила, сборники аэронавигационной информации (AIP) и в документе ИКАО "Дополнительные региональные правила" (Doc 7030). Эксплуатационные утверждения главным образом относятся к навигационным требованиям воздушного пространства; однако перед выполнением полетов в воздушное пространство соответствующий государственный полномочный орган, ответственный за это воздушное пространство, требует от эксплуатантов и летного экипажа принимать во внимание все эксплуатационные документы, относящиеся к данному воздушному пространству. 2 Контроль на борту за выдерживанием характеристик и выдача предупреждений2.1 Компоненты навигационных погрешностей и выдача предупреждений2.1.1 Боковая навигацияНеспособность обеспечить требуемую точность боковой навигации может объясняться навигационными погрешностями, относящимися к выдерживанию линии пути и определению местоположения ВС. Тремя основными компонентами погрешности в контексте контроля за выдерживанием характеристик и выдачи предупреждений являются: 1. Погрешность определения траектории (path definition error – PDE), 2. Погрешность техники пилотирования (flight technique error – FTE) и 3. Погрешность навигационной системы (navigation system error – NSE). Суммарная величина этих погрешностей обозначается как total system error – TSE.  Рисунок 7 – Основные компоненты погрешности TSE а) PDE имеет место, когда определенная системой RNAV траектория не совпадает с желаемой траекторией. б) FTE относится к способности летного экипажа или автопилота следовать по определенной траектории или линии пути, включая любые погрешности индикации (например, погрешность центрирования индикатора отклонения от курса (CDI)). FTE может контролироваться автопилотом или посредством установленных процедур для летного экипажа, а то, насколько эти процедуры необходимо дополнять другими средствами, зависит, например, от этапа полета и типа операций. Такой дополнительный контроль может быть обеспечен картографическим индикатором воздушной обстановки. в) NSE представляет собой разницу между расчетным и фактическим местоположением ВС. 2.1.2 Продольная навигацияТребования к точности в спецификациях RNAV и RNP определены для бокового и продольного (вдоль линии пути) измерений. Требования спецификаций RNP к контролю на борту за выдерживанием характеристик и выдаче предупреждений определяются для бокового измерения. Однако NSE является радиальной погрешностью, и таким образом контроль на борту за выдерживанием характеристик и выдача предупреждений обеспечивается во всех направлениях.  Рисунок 7 – Принцип определения допустимой погрешности 2.2 Роль контроля на борту за выдерживанием характеристик и выдачи предупрежденийПолеты по RNAV подразумевают обеспечение выдерживания необходимых характеристик бортовых систем. Исходя из существующих критериев летной годности, от систем RNAV требуется лишь продемонстрировать наличие предполагаемых функций и характеристик. Это приводит к тому, что, хотя заявленные характеристики системы RNAV могут быть весьма хорошими, они подвержены изменяемости функциональных возможностей системы. Системы имеющие функцию RNP позволяют свести к минимуму изменяемость и обеспечить надежность, повторяемость и предсказуемость при производстве полетов. Функция RNP позволяет экипажу обнаружить, соблюдает ли система требуемые навигационные характеристики, предусмотренные навигационной спецификацией. Это относится как к боковым, так и к продольным навигационным характеристикам. – “На борту” ясно означает, что контроль осуществляется на борту ВС, а не где-либо еще, например, с использованием наземного блока контроля за выдерживанием маршрута или с помощью наблюдения УВД. Контролирующий элемент функции RNP имеет отношение к FTE и NSE. Погрешность определения траектории (PDE) ограничивается оценкой целостности базы данных и функциональных требований на определяемой траектории и в расчет не принимается. – “Контроль” означает контроль за характеристиками ВС в части его способности определить погрешность местоположения и/или следовать по желаемой траектории. – “Выдача предупреждений” имеет отношение к контролю: если навигационная система ВС не функционирует надлежащим образом, летному экипажу об этом будет выдано предупреждение. Требования к контролю и выдаче предупреждений могут быть соблюдены с помощью: а) бортовой навигационной системы, обладающей возможностью контролировать NSE и выдавать предупреждения (например, алгоритм RAIM или FDE), плюс индикатор боковой навигации (например, CDI), позволяющий экипажу следить за FTE. Исходя из допущения, что PDE в расчет не принимается, данное требование соблюдается, поскольку NSE и FTE отслеживаются, что обеспечивает контроль за TSE; или б) бортовой навигационной системой, обладающей возможностью контролировать TSE и выдавать предупреждения. Результирующее влияние вышеизложенного очевидно в TSE. Приведенные в таблице спецификации RNP X, которые не требуют RF или FRT, имеют много общего со спецификациями RNAV в части PDE, поскольку желаемая траектория не определяется; в результате этого на развороте потребуется обеспечить дополнительное защищенное воздушное пространство. 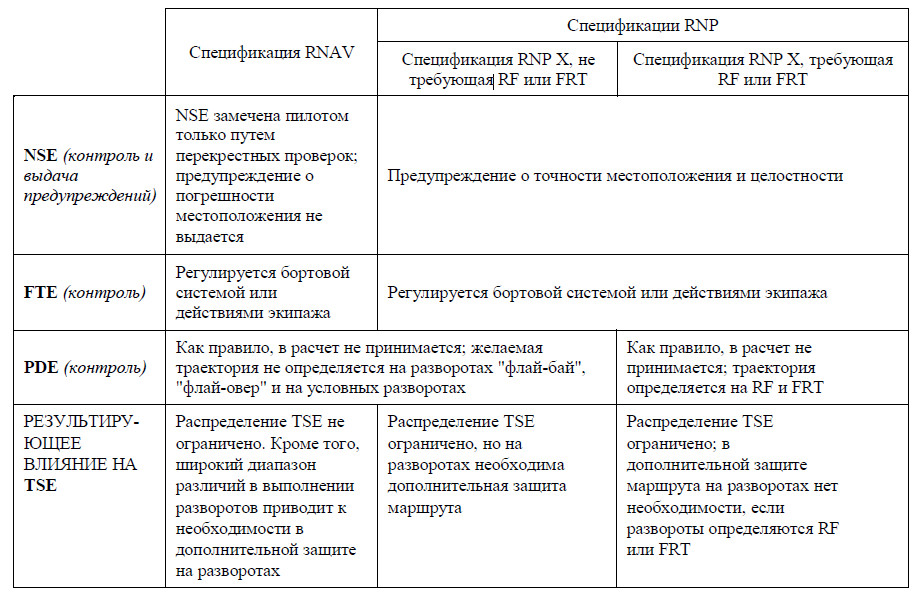 Рисунок 8 – Таблица спецификаций RNP X |