реферат. Реферат. Многофакторные эксперименты
 Скачать 136.12 Kb. Скачать 136.12 Kb.
|

Основы планирования многофакторного эксперимента Рис.6.1 Представление объекта в виде такой схемы основано на принципе «черного ящика». Имеем следующие группы параметров: 1) управляющие (входные) 2) выходные параметры 3) Предполагается, что возмущающие воздействия не поддаются контролю и либо являются случайными, либо меняются во времени. Каждый фактор Комбинацию факторов можно представить как точку в многомерном пространстве, характеризующую состояние системы. На практике целью многофакторного эксперимента является установление зависимости описывающей поведение объекта. Чаще всего функция (6.2.1) строится в виде полинома или Целью эксперимента может быть, например, построение зависимости (6.2.1) при минимальном количестве измерений значений управляющих параметров На первом этапе планирования эксперимента необходимо выбрать область определения факторов Если выбрана линейная модель (6.2.2), то для построения аппроксимирующей функции достаточно выбрать основной уровень и интервал варьирования управляющего параметра Для линейной модели интервал варьирования можно определить как а основной (нулевой) уровень - как среднее значение Для упрощения планирования эксперимента принято вместо реальных (натуральных) уровней где Рассмотрим полный факторный эксперимент на примере линейной модели (6.2.2). Если число факторов Условие проведения этого эксперимента можно зафиксировать в матрице планирования (табл.5.3). Таблица 6.3
Таким образом, для двух факторов построение матрицы планирования элементарно. Для большего числа факторов необходимо разработать правила построения таких матриц. Например, при появлении фактора Таблица 6.4
Это не единственный способ расширения матрицы планирования. Используют также перемножение столбцов, правило чередования знаков. Очень важны общие свойства матрицы планирования: 1) симметричность матрицы относительно центра эксперимента: 2) условие нормировки Первые два свойства относятся к построению отдельных столбцов матрицы 3) совокупность столбцов имеет следующее свойство 4) Ротатабельность. Это означает, что точки (значения факторов) в матрице планирования подбираются так, что точность предсказания выходного параметра должна быть одинакова на равных расстояниях от центра эксперимента (нулевого уровня) и не зависеть от направления. Планирование эксперимента первого порядка для двух переменных. План эксперимента первого порядка для двух переменных показан на рис.6.2. То есть искомая функция или гиперболоида Расположение этой модели в пространстве показано на рис.6.2 поверхностью, проходящей через точки 1 – 2 – 3 – 4. 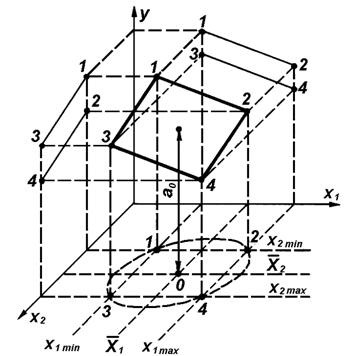 Рис.6.2 Необходимые уровни для полного факторного эксперимента расположены в плоскости Если рассматривать модель (6.2.4) в виде плоскости, то план эксперимента является ненасыщенным (избыточным), так как необходимо определить только три коэффициента Для ненасыщенного плана (6.2.4) избыточное число опытов позволяет произвести усреднение и оценить размеры погрешности. Проведя плоскость через точки 1, 2 и 3, можно оценить погрешность, определив, на каком расстоянии от плоскости находится точка 4. Оценка Погрешность в других точках может быть оценена проведением плоскостей 1 – 3 – 4, 1 – 2 – 4 и 2 – 3 – 4. С другой стороны коэффициент Поскольку полученные таким образом значения Если уравнение плоскости представить в виде где Процесс переноса начало координат в центр пространства факторов с координатами Важнейшим фактором является то, что в результате такого усреднения построенная плоскость удовлетворяет всем четырем значениям Таким образом, один из четырех опытов является избыточным и может быть исключен. Но тогда план эксперимента становится неротатабельным, то есть неравноточным по всем направлениям. Если исключена точка 4 на рис.6.2, то в направлении 3 – 2 в плоскости факторов будет обеспечена большая точность, чем в направлении 1 - 0. В этом случае для восстановления ротатабельности точки 1, 2 и 3 в плоскости факторов должны быть равноудалены как друг от друга, так и от центра, то есть располагаться в вершинах равностороннего треугольника с центром в точке 0. В общем случае для линейной модели (6.2.4), эксперимент содержащий конечное число опытов позволяет получить только оценки для коэффициентов где Для вычисления коэффициентов линейной модели по формуле (6.2.7) получим: Таким образом, для вычисления В случае симметричности матрицы планирования Планируя эксперимент, стремятся получить линейную модель, однако в выбранных интервалах варьирования априори не известно, что линейная модель адекватно описывает поведение системы. Нелинейность связана со смешанным взаимодействием. Формула (6.2.5) всегда может быть оценена по полному факторному эксперименту. Для полного факторного эксперимента |