Модуль Биомеханические основы двигательного аппарата и двигательных действий
 Скачать 1.34 Mb. Скачать 1.34 Mb.
|

|
Особенности строения мышц и их функции Приспособление организма человека и животных к постоянно меняющимся условиям внешней среды осуществляется за счет сложнейших рефлекторных реакций важное место, среди которых занимают двигательные акты пищевого, оборонительного и репродуктивного типа. В осуществлении ряда вегетативных функций, таких как пищеварение, дыхание, кровообращение всегда принимают участие мышцы. Учение Р.Магденовича о моторно-висцеральных рефлексах показало взаимосвязь деятельности двигательного аппарата, скелетных мышц и вегетативных органов. Вследствие недостаточной двигательной активности в организме человека нарушаются нервно-рефлекторные связи, заложенные природой и закрепленные в процессе тяжелого физического труда. Это в свою очередь обуславливает изменения регуляции деятельности различных систем организма, и в первую очередь сердечно-сосудистой и дыхательной систем. Тело человека создано для движений, поэтому не удивительно, что мышечная масса составляет 45% от общей массы тела. Мышцы как физические тела обладают рядом механических свойств: упругостью, жесткостью, релаксацией, вязкостью, ползучестью. Как биологические объекты мышцы проявляют свойства возбудимости и сократимости. В биомеханике рассматриваются только четыре свойства мышц - сократимость, жесткость, упругость и релаксация. Сила и мощность одних и тех же мышц зависит от ряда эндогенных и экзогенных факторов: возраста, пола, исходного и текущего функционального состояния, уровня физической подготовленности, условий атмосферной среды и т. д. Скелетные мышцы, это основной энергетический источник, с помощью которого выполняются различные движения. В организме человека скелетные мышцы передают силу частям скелета посредством сухожилий. Сухожилия, это упругие, отчасти растяжимые структуры, которые при развитии силы мышцы могут находиться в состоянии напряжения. Мышцы характеризуются разным строением и функциями, но в своей основе имеют одну и ту же анатомическую структуру. Мышцы состоят из пучков или связок мышечных волокон, число которых зависит от размера мышцы. Мышечные волокна состоят из миофибрилл, которые в свою очередь состоят из различных миофиломентов, цитоскелетных протеинов и цитоплазменых органелл их компонентов. Именно их взаимодействие и образование поперечных актино-миозиновых мостиков и их количество определяет силу и скорость движения. Протеины миофиломентов – тропомиозин и тропоин регулирует действие мышц. Мышцы человека очень экономичны, их коэффициент полезного действия составляет около 40%. Энергия мышц получается за счет химической энергии. Икроножная мышца, например, способна поднять груз массой до 100 кГ. Энергия мышц получается за счет химических преобразований в организме. В основе деятельности мышц, лежат сложные химические превращения внутри клеток. Как уже отмечалось, мышцы включают в себя мышечные волокна, которые представляют собой удлиненные палочки – мицеллы, состоящие из пучка белковых молекул. Белковая молекула, это цепь чередующихся атомов углерода и азота (2 атома углерода, 1 атом азота и т.д.). К первому углеродному атому каждой группы присоединена группа сложных атомов. Одна из гипотез (гипотеза Джерарда) так объясняет механизм действия мышечной силы. Белковая молекула погружена в жидкость, 70% которой составляет вода. При сцеплении белковых групп, белковая цепь изгибается и укорачивается, вызывая сокращение мышцы. Так как связь между белковыми группами химическая, то и сама мышечная сила имеет химическую природу. Следует отметить, что описанный механизм явления, это одна лишь из возможных гипотез о механизме действия мышечной силы. Классификация мышц. В состоянии покоя мышечная ткань представляет собой вязкоупругий материал, с характерными для этого материала свойствами. По морфологическим особенностям и функциям мышцы человека делятся на 3 вида: гладкая мускулатура внутренних органов и сосудов, характеризующаяся медленными сокращениями и большой выносливостью; поперечно-полосатая мускулатура сердца, работа которой не зависит от воли человека; поперечно-полосатая скелетная мускулатура, находящаяся под волевым контролем и обеспечивающая функции передвижения. Поперечно-полосатые мышцы за небольшим исключением, прикрепляются к костям скелета, обеспечивают положение тела в пространстве и его движение. Насчитывают более 400 скелетных мышц. Поперечно-полосатые мышцы состоят из мышечных волокон, длиной от 1 мм до нескольких сантиметров, которые представляют собой цилиндрические структуры с большим количеством ядер, расположенных по периферии. Характерный признак мышечных волокон – их поперечная исчерчённость. Сердечная мышца, составляющая большую часть перегородки сердца, представляет сеть отдельных клеток, имеющих полосы. Гладкая мышца, которая является основой стенок некоторых внутренних органов, а также кровеносных сосудов, состоит из отдельных клеток, разделенных тонкой щелью и не имеющих поперечных полос. Скелетная мышца состоит из соединительных клеток, имеющих четкие поперечные полосы. За исключением некоторых мимических мышц, скелетные мышцы, действуя поперек суставов, обеспечивая вращение сегментов тела. Скелетные мышцы делят на группы по месту расположения (мышцы головы, мышцы туловища, мышцы верхней и нижней конечностей). В свою очередь, каждая из этих групп делится на более мелкие мышцы. Например, среди мышц головы различают мимические и жевательные; среди мышц туловища – мышцы спины, мышцы живота, мышцы тазового дна. По форме мышцы бывают веретенообразные (на конечностях), лентовидные (передняя стенка живота), круговые (круговая мышца рта) и др.Благодаря протекающим в мышцах процессам происходит превращение химической энергии продуктов питания в силу. С позиции биомеханики работа мышцы определяется, когда она производит перемещение части тела, или тяжести на какое либо расстояние. При этом пусковым механизмом для повышения работы мышцы является нервный импульс, который распространяется по нервному волокну и через нервно-мышечный синапс передается мышце, что приводит ее в состояние возбуждения. При сокращении мышцы возникает сила тяги, которая, зависит от ее поперечного сечения, начальной длины волокон. Чем больше поперечное сечение мышцы, тем больше сила ее тяги. Под силой подразумевают способность развивать в мышцах при максимальном усилии напряжение той или иной величины. Силу мышц измеряют с помощью различных приборов, одним из которых является динамометр. А. Беком была определена «удельная сила мышцы» (таб.1). Внешнее проявление сократительной активности мышцы состоит в том, что при ее фиксированной длине развиваются усилия, а при фиксированной нагрузке происходит ее укорочение. Удельная сила различных мышц Таблица 1.
Мышечная сила зависит не только от внутренних факторов (возбудимости ЦНС, гуморальных механизмов, оксигенации тканей и т.д.), обуславливающих состояние мышцы, но от внешних условий (характер выполняемой работы, ее продолжительность). Установлено, что сила тяги мышц зависит от совокупности механических, анатомических и физиологических условий. Основным механическим условием, определяющим силу мышц, является нагрузка, как растягивающая мышцу, так и противодействующая ее сокращению. При действии нагрузки на мышцу она начинает функционировать в уступающем режиме и, длина ее увеличивается. С увеличением нагрузки сила тяги мышцы увеличивается, но до определенного предела, после которого дальнейшее нарастание нагрузки уже не вызывает увеличение силы мышц. Против нагрузки мышца выполняет преодолевающую работу. При этом с увеличением нагрузки сила тяги мышцы становится больше, но быстрота ее сокращения снижается. Однако при уступающей работе, которая выполняется с ускорением, напряжение мышцы растет (рис.6) 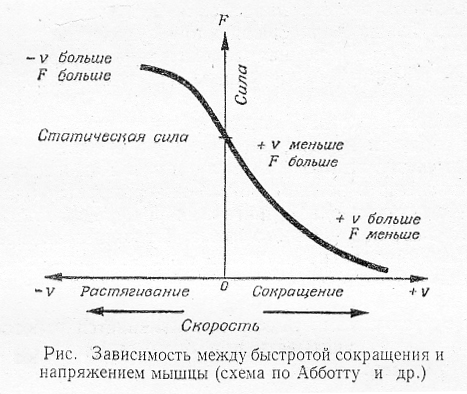 Рис.6. Зависимость между быстротой сокращения и напряжением мышцы. Существует два режима работы мышц – изометрический и анизометрический. При изометрическом режиме имеет место статическая сила (F0) и скорость сокращения мышцы (V0) равна нулю. Статическая сила, проявляемая спортсменом в изометрическом режиме, зависит от степени утомления и его функционального состояния. При изометрическом режиме нет перемещений и поэтому работа (в физическом понимании) отсутствует. Например, в изометрическом режиме работают мышцы спортсмена, выполняющего упражнение по удерживанию штанги, в положении виса на перекладине. При анизометрическом режиме имеют место две разновидности работы мышц – уступающая и преодолевающая. В преодолевающем режиме мышца укорачивается в результате сокращения, а в уступающем режиме мышца растягивается внешней силой. Первая часть кривой Хилла отображает закономерности преодолевающей работы, при которой нарастание скорости сокращения мышцы вызывает уменьшение силы тяги. А в уступающем режиме наблюдается обратная картина: увеличение скорости растяжения мышцы сопровождается увеличением силы тяги мышцы. Опускание груза, спуск по лестнице, противодействие силе, превышающей силу мышц – все это примеры уступающего режима сокращения, при котором мышца выполняет отрицательную работу. Отрицательная работа мышц в несколько раз экономичней положительной и предварительное выполнение ее повышает величину и экономичность следующей за ней положительной работы. Именно этим объясняется высокая экономичность бега человека. В биомеханике различают три вида отрицательной работы: отрицательная работа в суставе, отрицательная работа мышц и отрицательная работа над звеном тела. Отрицательная работа мышц совершается при их растягивании в напряженном состоянии. Отрицательной работе мышц соответствует режим сокращения, который получил название «уступающий». Определить отрицательную работу мышц, выполняемую при локомоциях очень сложно. Поэтому силу тяги в движениях человека определяют аналитическим путем. Для этого необходимо знать управляющий момент и плечо силы тяги данной мышечной группы. Сила тяги мышц определяется отношением управляющего момента к плечу силы тяги. Для определения отрицательной работы мышц используется и математическое моделирование, для которого также необходимы сведения о морфометрических характеристиках скелетно-мышечного аппарата человека, в частности, о плечах тяги мышц. Сопоставляя силу тяги мышц с изменением ее длины, можно определить работу мышц, в том числе и отрицательную. Широко используется также метод качественной оценки отрицательной работы мышц. В этом случае анализируются электрическая активность мышц и изменение угла в односуставном суставе. В ряде исследований было установлено, что при ходьбе отрицательная работа выполняется в основном икроножной мышцей и в несколько меньшей степени, камбаловидной. Растягивание активных мышц происходит в течение 2/3 опорного периода и составляет для икроножной и камбаловидной мышц порядка 1,5 и 1 см соответственно. С увеличением скорости ходьбы отрицательная работа икроножной мышцы уменьшается. В момент постановки ноги на опору некоторую отрицательную работу выполняет широкая мышца бедра и передняя большеберцовая мышца, работа которой, как полагают, значительно возрастает во время заднего толчка. В беге большой управляющий момент наблюдается в голеностопном суставе в опорном периоде. Он направлен на подошвенное сгибание стопы, что свидетельствует об активности мышц задней поверхности голени (данные миографических исследований). В то же время при постановке ноги на опору происходит тыльное сгибание стопы. Следовательно, есть основание считать, что односуставные мышцы задней поверхности голени выполняют отрицательную работу. Отрицательную работу выполняет и двусуставная икроножная мышца, длина которой в фазе амортизации увеличивается на 3-4 см, а к середине переноса – до 9 см. Мышцы-разгибатели коленного сустава в опорном периоде отрицательной работы, по-видимому, не выполняют, так как угол в суставе практически не меняется. К анатомическим условиям проявления силы тяги мышцы относят строение мышцы (перистые мышцы, веретенообразные и мышцы с параллельными и продольными волокнами) и ее местоположение в данный момент движения. Максимальная сила будет зависеть, прежде всего, от количества и толщины мышечных волокон, образующих мышцу. Количество и толщина мышечных волокон обычно определяется по физиологическому поперечнику мышцы. Физиологический поперечник мышцы, это площадь поперечного сечения мышцы (см2), проходящего через все мышечные волокна перпендикулярно к их продольным осям. Он определяет суммарную тягу всех волокон с учетом их взаимного расположения. Толщина мышцы не всегда совпадает с ее физиологическим поперечником. Например, при равной толщине, мышцы с перистым расположением волокон значительно отличаются от других мышц по физиологическому поперечнику и обладают большей силой сокращения. Кроме того, в мышцах с косым ходом волокон при малом растяжении возникает значительное увеличение упругих сил. Сила мышцы измеряется максимальным напряжением, которое она способна развить в условиях изометрического сокращения. Как отмечалось, максимальная сила мышцы зависит, прежде всего, от количества и толщины мышечных волокон, образующих мышцу, а также от характера прикрепления мышц к костям и от места приложения силы действия. При движениях изменяются положение костных рычагов и углы приложения сил. Длина мышц также не остается постоянной и вследствие этого их напряжение становится то больше, то меньше. Сила мышцы в значительной степени обусловлена ее функциональным состоянием. Физиологические условия проявления силы мышцы сводится к ее возбудимости, лабильности и утомлению. Мышечная сила зависит не только от активирующего влияния ЦНС, но и в очень высокой степени от внешних механических условий работы мышц. При увеличении скорости сокращения мышцы в преодолевающем режиме ее сила тяги снижается по гиперболическому закону. При уступающей работе увеличение скорости растягивания мышцы увеличивает ее силу тяги. Данный факт необходимо учитывать при оценке силы тяги мышц в быстрых движениях. Известно, что механическая мощность мышцы равна произведению силы, развиваемой ею на скорость укорочения. Мощность мышечного сокращения является наибольшей, если сила и скорость составляют примерно 30% от максимально возможных величин. Например, максимальная мощность (200 Вт) мышцы руки человека достигается при скорости сокращения 2,5 м/с. При этом, мощность мышц значительно выше при умеренных нагрузках и скоростях сокращения, чем в экстремальных условиях. В биокинематических цепях все звенья тела взаимосвязаны, поэтому в каждом конкретном случае лишь совокупность всех факторов определяет результат работы мышц в целом. При этом, чем выше степень внутримышечной и межмышечной координации, тем больше максимальная сила, проявляемая человеком. Внутримышечная координация связана со степенью синхронности сокращения двигательных единиц мышцы, а межмышечная координация – со степенью координированности участвующих в работе мышц. Двигательная единица состоит из одного мотонейрона и группы иннервируемых им мышечных волокон, но размеры таких единиц широко варьируют. Максимальная сила, которую может развить мышца, при оптимальной ее длине составляет около 2*106 дин на 1см2 поперечного сечения мышцы. Сила мышцы, приходящая на 1 см2 ее поперечного сечения называется абсолютной мышечной силой. Абсолютная мышечная сила человека соответствует диапазону 50 – 100 Н. Сила и скорость сокращения мышцы увеличивается по мере вовлечения в процесс большего количества двигательных единиц. Под силой сокращения мышцы понимается разность между общей силой, которую развивает мышца при ее раздражении и упругой восстанавливающей силой, которая обусловлена растяжением мышцы сверх ее нормальной длины. Для описания зависимости между силой и скоростью мышечного сокращения, используют уравнение Хилла (А. Hill, 1938): V = b(F0-F)(F+a) или F=(F0+a)(v/b+1)-a, где V - скорость укорочения мышцы; F - сила (нагрузка); F0 - максимальная изометрическая сила, которую может развить мышца; b- константа, имеющая размерность силы. Скелетные мышцы являются основным энергетическим источником тела человека. Движения осуществляются скелетными мышцами, деятельность которых управляется центральной нервной системой. В процессе эволюции животного мира идет непрерывное совершенствование движений. Наивысшего развития, движения достигают в трудовой деятельности человека. По определению И.М.Сеченова, все разнообразие высших проявлений мозговой деятельности сводится к одному явлению – мышечному движению. Мышечный аппарат осуществляет как статическую деятельность, так и динамическую, обеспечивая передвижение его в пространстве, или перемещение частей тела относительно друг друга. Оба вида мышечной деятельности взаимодействуют, дополняя друг друга: статическая деятельность мышц обеспечивает исходный фон для динамической, или фазной, их деятельности. Мышцы, окружающие сустав, при движении разделяются на группы совместного и противоположного действия. Существуют два случая группового взаимодействия мышц: синергизм и антагонизм. Мышцы синергисты тянуть за кость под углом друг к другу. Одна составляющая силы тяги у них направлена одинаково, а другая противоположно. Противоположно направленные составляющие нейтрализуются, а одинаково направленные - суммируются. У всех мышц синергистов есть составляющие силы тяги, направленные в сторону движения. Эти составляющие в сумме создают движущую равнодействующую тягу. Мышцы синергисты перемещают звенья тела в одном направлении, и их совместное действие обуславливает увеличение результирующей силы. Если одна из мышц - синергистов локально утомлена или травмирована, другая выполняет компенсаторную функцию, обеспечивая тем самым выполнение двигательного действия. Мышцы антагонисты функционируют едино по задачи, но противоположно по направлению. Они обеспечивают точность выполнения движений и способствуют снижению вероятности травматизма. Все мышцы антагонисты растягиваются при движении, поэтому они могут вызвать движение звена в обратном направлении. Вследствие способности мышцы создавать однонаправленное усилие, движение относительно сустава контролируется двумя различными группами мышц, с взаимно противоположным направлением действия. Например, при отсутствии других сил, движение "сгибание-разгибание" локтя контролируется двумя мышечными группами: вызывающей разгибание локтя (разгибатели локтя) и управляющей сгибанием (сгибатели локтя). Однако когда на систему действуют другие силы, такие как сила тяжести, сгибатели локтя могут управлять разгибанием, а разгибатели – сгибанием. Следовательно, деление мышц на синергистов и антагонистов, в некоторой степени, относительное, т.к. в некоторых случаях мышца - антагонист может выполнять функции мышцы - синергиста и наоборот Таким образом, функция мышцы существенно зависит от условий, в которых она работает. Тем не менее, для управления каждым анатомически возможным движением человека требуется, как минимум, одна пара противоположно действующих мышц (сгибание-разгибание, отведение-приведение). |