Модуль Биомеханические основы двигательного аппарата и двигательных действий
 Скачать 1.34 Mb. Скачать 1.34 Mb.
|

|
Соединение звеньев тела и рычаги в опорно-двигательном аппарате человека. Изучая движения человека, необходимо с точки зрения биомеханики знать, как устроен двигательный аппарат человека. Поэтому биомеханика двигательного аппарата является как бы основой биомеханики движения. Движущие части тела человека обычно бывают соединены с другими подвижными или неподвижными частями. Подвижное соединение нескольких звеньев образует кинематическую связь. Тело человека представляет собой объединения отдельных звеньев различными суставами в кинематическую связь. Различают связи: геометрические (постоянные препятствия перемещению в каком-либо направлении) и б) кинематические (ограничение скорости, например мышцей антагонистом). Участие мышц в управлении движениями делает соединение звеньев способными на множество вариантов движений. Мышцы определяют движения костных рычагов, передающих движения и усилия, и маятников, сохраняющих начавшееся движение. Подвижное соединение двух костных звеньев тела образуют биокинематическую пару, в котором возможности движений определяются его строением и управляющим воздействием мышц. В биокинематических парах имеются постоянные степени связи, которые определяют, сколько и каких остается степеней свободы движений. Почти все биокинематические пары в основном вращательные; лишь немногие допускают чисто поступательное скольжение звеньев относительно друг друга и одна пара, это голеностопный сустав – винтовое движение. Соединения, допускающие поворот звеньев пары, называют шарнирами. Биокинематические пары в свою очередь образуют биокинематиеские цепи. Биокинематическая цепь – это последовательно замкнутое или незамкнутое соединение биокинематических пар. В незамкнутых цепях имеется свободное (конечное звено), входящую лишь в одну пару. В таких цепях возможны изолированные движения в каждом отдельно взятом суставе. В замкнутых цепях нет свободного звена, каждое звено входит в две пары. Вследствие этого в замкнутой цепи изолированное движение в одном суставе невозможно, в движение обязательно включаются и другие соединения. Незамкнутая цепь может стать замкнутой, если конечное звено получить связь с другим звеном, непосредственно или через какое либо тело. Следовательно, движения в незамкнутых цепях характеризуются относительной независимостью звеньев. Примером незамкнутой цепи может служить любая свободная конечность. Две ноги могут замкнуть цепь через опору, например в положении выпада. Значительная часть незамкнутых биокинематических цепей оснащена многосуставными мышцами. Поэтому, движения в одних суставах через такие мышцы связаны с движениями в соседних суставах. В замкнутых цепях движения в одних звеньев влияют на движения других звеньев, независимо от того, как далеко они расположены. Замкнутая цепь может разомкнуться и, вследствие этого изменяются ее возможности. Постоянно замкнутые цепи, например, грудина-ребро-позвоночник-ребро-грудина, для анализа движений интереса не представляет. Любое физическое тело, не имеющее никаких ограничений (связей) может двигаться в пространстве относительно трех взаимно перпендикулярных осей поступательно, а также вращательно вокруг них. У такого тела шесть степеней свободы. Тело не ограниченное в движениях называется свободным. Наложение каждой связи уменьшает число степеней свободы. Зафиксировав одну точку свободного тела, сделав его звеном биокинематической пары, лишаем тело сразу трех степеней свободы. В данном случае, тело не сможет двигаться вдоль трех осей координат, у него останутся только возможности вращения вокруг этих осей. Так соединены кости трехосных суставов. Примером подобных ограничений может служить тазобедренный сустав, в котором имеется три степени свободы из шести (вращение вокруг трех осей). В случае закрепления двух точек звена, имеется ось, проходящая через эти точки и, остается одна степень свободы (одноосный межфаланговый сустав). В этом случае возможно только вращение лишь вокруг линии, проходящей через обе эти точки. Подобное соединение характерно для костей одноосных суставов, обеспечивающих одну степень свободы. Закрепление третьей точки, не лежащей на этой оси, полностью лишает звено свободы движений. Следовательно, такое соединение к суставам не относится. В большинстве суставов тела человека в основном 2 или 3 степени свободы, что обеспечивает множество траекторий движений. Рассмотрим систему из двух звеньев, соединенных осью ОО (рис. 7)  Рис. 7. Система из двух звеньев, соединенных осью ОО. Это будет одноосное двухзвенное соединение. При неподвижном звене В, звено А имеет одну степень свободы как тело, вращающееся вокруг неподвижной оси. Примерами одноосного сочленения является плечелоктевое, надпяточное и фаланговые соединения. Они допускают только возможность сгибания и разгибания с одной степенью свободы. Увеличим двухзвенную систему на одно звено с осью ОО, параллельной оси О`О` (рис. 8). 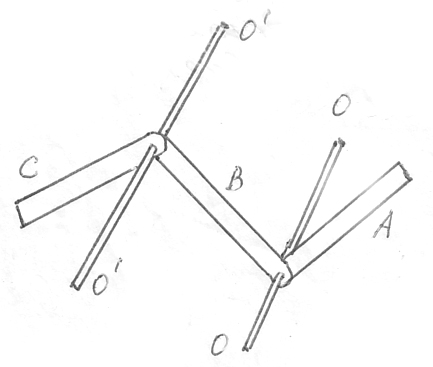 Рис. 8. Система, состоящая из трех звеньев. При неподвижном звене С все точки звена В обладают одной степенью свободы, в том числе и ось ОО, которая может перемещаться по окружности. Звено же А, вращаясь вокруг ОО, имеет еще одну степень свободы. Таким образом, в одноосной трехзвенной системе закрепленное звено не имеет свободы перемещения, второе звено имеет одну степень свободы и третье – две. Понятие одноосная система характеризует не число осей, которых может быть несколько, а одно направление всех осей. Например, фаланги пальцев соединены суставами, представляющими одноосные соединения. Ногтевая фаланга имеет две степени свободы относительно основной и одну степень свободы относительно средней. Двухосное соединение допускает вращение звеньев по двум взаимно перпендикулярным осям, вследствие неполного соответствия по форме суставных поверхностей (рис. 9) 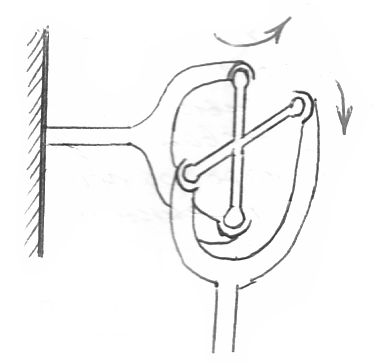 Рис. 9. Двухосное соединение. Оно имеет две степени свободы вращения. Такое двухосное соединение осуществляется в организме человека двумя близко расположенными сочленениями: атлантозатылочным и эпистрофоатлантовым. Первое сочленение имеет горизонтальную ось, направленную от правого плеча к левому, оно осуществляет вращение черепа вперед и назад. Эпистроф - примыкающий к атланту шейный позвонок – имеет маленький цилиндрический шип, который образует с кольцом атланта одноосное цилиндрическое сочленение с вертикальной осью. Это сочленение обеспечивает вращение головы вокруг вертикальной оси. Трехосное соединение дает возможность вращения вокруг трех взаимно перпендикулярных осей. Пример такого соединения представлен на рис. 10. 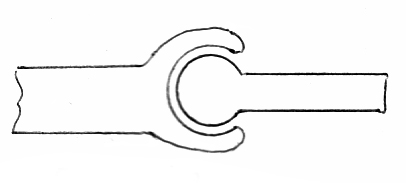 Рис. 10. Трехосное соединение. Это соединение имеет три степени свободы вращения. Шаровой цилиндр осуществлен в тазобедренном суставе человека. Сочленовая впадина таза имеет форму почти правильного полушария, Соответственную форму имеет, и головка бедренной кости, входящую во впадину. Присоединение новых звеньев увеличивает кинематическую подвижность. Так, например, череп благодаря некоторой подвижности межпозвонковых суставов имеет все шесть степеней свободы. Множество степеней свободы кинематической пары в многоосных суставах требует для выполнения каждого определенного движения: а) выбора необходимой траектории, б) управления движением по траектории, в) регуляции движения, понимаемой как борьба с помехами, сбивающими с траектории. Подвижность кинематических цепей обеспечивается работой мышц. Мышцы, действуя на кости, вращают их вокруг осей суставов.Такая система представляет собой особый рычаг Опорно-двигательная система человека, состоящая из сочлененных между собой костей скелета и мышц, представляет с точки зрения физики совокупность рычагов, удерживаемых человеком в равновесии. Примером рычага может служить работа мышц при удержании головы или тела в тазобедренном суставе. Другим примером рычага является удержание груза в руке, согнутой в локтевом суставе. Каждый рычаг имеет точку опоры – ось рычага и точки приложения двух взаимно противодействующих сил. Чтобы определить расстояние до места приложения сил от оси рычага, измеряют плечи рычага. Кратчайшее расстояние от места приложения сил до оси рычага называется плечом рычага. Плечо силы, это расстояние от направления силы действия до оси рычага. Плечо рычага не изменяется, а величина плеча силы зависит от угла, под которым сила действует на рычаг. Костные рычаги, подвижно соединенные в суставах под действием приложенных сил могут либо сохранять, либо изменять положение тела и служат для передачи движения и силы на расстояние. Рычажное устройство двигательного аппарата человека обеспечивает дальние броски и сильные удары. Однако при этом происходит выигрыш в скорости и мощности движений и проигрыш силы мышечного сокращения. В анатомии различают рычаги силы, в которых происходит выигрыш в силе, но проигрыш в скорости и расстоянии, и рычаги скорости, в которых, проигрывая в силе, выигрывают в скорости перемещения. Хорошим примером рычага скорости является нижняя челюсть. Действующая сила осуществляется жевательной мышцей, противодействующая сила (сопротивление раздавливаемой пищи) – действует на зубы. Плечо действующей силы значительно короче, чем у сил противодействия, поэтому жевательная мышца короткая и сильная. Когда надо разгрызть что-либо твердое, человек действует коренными зубами, при этом уменьшается плечо силы сопротивления. Рычаги бывают первого и второго рода. У рычага первого рода (двуплечный рычаг) группы сил приложены по обе стороны от оси рычага. У рычага второго рода (одноплечный рычаг) силы приложены по одну сторону от оси рычага. Двуплечные рычаги используются, например, при сохранении положения, стоя, а одноплечные – в быстрых движениях конечностей. Следует отметить, что для разных мышц, прикрепленных в разных местах костного звена, рычаг может быть разного рода. Так, относительно своих сгибателей предплечье (при работе против веса груза) представляет собой одноплечный рычаг; относительно же мышц разгибателей (при удержании груза над головой) – двуплечный рычаг. Рычаг находится в равновесии, если равны моменты противодействующих сил: где F1 - сила тяжести удерживаемого груза; l1 -длинное плечо рычага; F2 - сила двуглавой мышцы плеча; l2 -короткое плечо рычага, равное расстоянию от места прикрепления сухожилия до оси вращения; 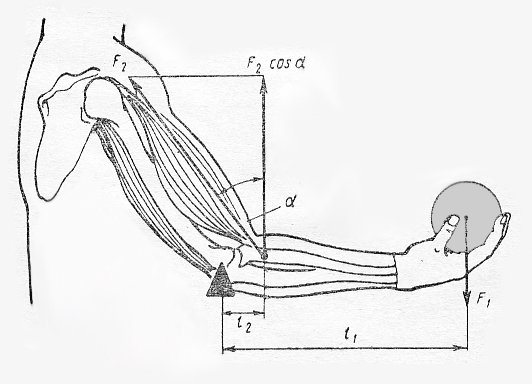 Рис.11. Пример рычага второго рода. Мерой действия силы на рычаг служит ее момент относительно точки опоры. Моментом силы называется произведение модуля силы на ее плечо: Mz(F) = Fd, где F – действующая сила, d - Момент силы считается положительным, если сила вызывает вращение тела против часовой стрелки, и отрицательным, если сила вызывает вращение по часовой стрелке. Для сохранения положения звена в суставе необходимо равенство моментов движущих и тормозящих сил. В случае большей величины момента движущих сил звено приобретает положительное ускорение (в сторону движения тела). При большей величине момента тормозящих сил звено приобретает отрицательное ускорение и вследствие этого возникает торможение звена. При равенстве противоположных относительно оси сустава моментов сил звено или сохраняет свое положение, или продолжает свое движение с прежней скоростью. На практике момент тормозящих и движущих сил крайне редко бывают равными, поэтому имеет место разгон и торможение звена. Отрицательная работа в суставе имеет место, когда направление действия управляющего момента в суставе противоположно суставной скорости. При этом возможны пять вариантов движения в суставе: а) движения в суставе осуществляется в одном направлении против часовой стрелки, звено1 догоняет звено2; б) звено1 движется против часовой стрелки, звено 2 не вращается; в) звно1 и 2 движутся навстречу друг другу; г) звено 2 движется по часовой стрелке, звено 1 – не вращается; е) вращение звеньев тела осуществляется по часовой, стрелки, звено 2 догоняет звено 1. Во всех случаях моменту, направленному на увеличение суставного угла соответствует уменьшение угла между звеньями. Различия заключаются лишь в том, какое из двух звеньев теряет энергию, а какое ее приобретает. При анализе мощности управляемых моментов в суставах нижних конечностей при ходьбе было выявлено, что отрицательная мощность наблюдается главным образом в тазобедренном суставе во время опоры. В коленном суставе наблюдается в начале и в конце опорного периода, а также во второй половине фазы переноса ноги. В среднем за цикл отрицательная работа момента в этих суставах несколько превышает положительную работу. В голеностопном суставе выполняется в основном положительная работа. При спринтерском беге наибольшие значения отрицательных мощностей наблюдается в голеностопном суставе в первой половине опорного периода. В данном суставе величина отрицательной работы примерно равна положительной работе. В коленном суставе выполняется в основном отрицательная работа, причем наибольшие величины отрицательной мощности (порядка 2000-3000 Вт) наблюдаются, когда нога находится в безопорном положении. Положение центр масс тела человека. В однородном поле тяжести, для которого ускорение свободно падающего тела является постоянной величиной (g=const), вес любой частицы тела пропорционален ее массе. Поэтому о распределении масс в теле человека можно судить по положению его центра масс. При поступательном движении все точки тела совершают одинаковые движения. Поэтому для оценки динамики движения тела достаточно рассмотреть движение одной материальной точки. Обычно в качестве такой точки выбирают общий центр масс (ОЦМ). Общим центром масс тела человека называется воображаемая точка, где пересекаются линии всех сил, действующих на тело, приводящих к поступательному движению и, не вызывающие его вращение. Если тело движется не поступательно, то, в зависимости от конкретной задачи можно решить, достаточно ли ограничиться рассмотрением движения одного центра масс (ЦМ) или необходимо еще провести анализ движения тела ЦМ системы. Следовательно, необходимо различать понятия ЦМ звеньев тела и ОЦМ В условиях действия гравитационного поля ОЦМ совпадает с общим центром тяжести (ОЦТ) и не совпадает в невесомости и водной среде. Общим центром тяжести называется воображаемая точка равнодействующей сил тяжести всех частей тела. Для тела, находящегося в космическом пространстве, где силы гравитационного притяжения отсутствуют, понятие центра тяжести бессмысленно. В водной и воздушной среде для определения состояния равновесия тела необходимо знать положение центра объема (ЦО) и центра поверхности (ЦП) тела человека. Центр объема тела – это точка приложения равнодействующей силы гидростатического давления, которая расположена на 2-6 см выше ОЦМ. Поскольку плотность тела неодинаковая, во время глубокого вдоха центр объема смещается вверх к поверхности головного отдела. Центр поверхности тела – это точка приложения равнодействующей сил действия среды. Положение центра поверхности зависит от позы человека и направления потока среды, При высоких скоростях движения (например, прыжки), когда действует, достаточна большая сила сопротивления среды, от взаимного расположения общего центра масс и центра поверхности зависит сохранение положения равновесия тела человека или спортивного снаряда. При изменении конфигурации (позы) тела человека изменяется положение центра масс звеньев тела, что обуславливает и изменение положения ОЦМ. Следовательно, положение ОЦМ тела определяется тем, где находится ЦМ отдельных звеньев тела. Для решения практических задач считают, что ЦМ звеньев тела расположены на их продольных осях, соединяющих центры соответствующих суставов (например, плечо, предплечье, бедро и т.д.). Если бы звенья тела были бы однородными по своему составу и плотности, а также имели форму правильных цилиндров, то ЦМ каждого из них находился бы на продольной оси звена и делил это звено на два равных участка. Однако звенья тела человека по своей форме похожи на усеченный конус, проксимальная часть которых тяжелее, поэтому ЦМ звеньев тела находится на продольной оси звена ближе к проксимальному концу. Вследствие этого ЦМ делит звено на две части таким образом, что проксимальная часть меньше половины длины звена, а дистальная часть больше. Если рассматривать скелет как совокупность отдельных звеньев, соединенных в один организм, то окажется, что все эти звенья при нормальной стойке образуют систему, находящуюся в крайне неустойчивом равновесии. Так, опора туловища представлена шаровыми поверхностями тазобедренного сочленения. Центр масс туловища расположен выше опоры, что при шаровой опоре создает неустойчивое равновесие. То же самое относится и к коленному соединению и к голеностопному. Все эти звенья находятся в состоянии неустойчивого равновесия. Центр масс тела человека расположен при нормальной стойке как раз на одной вертикали с центром тазобедренного, коленного и голеностопного сочленения ноги на 2 – 2,5 см ниже мыса крестца и на 4 – 5 см выше тазобедренной оси. У мужчин, в среднем, на 1-2 % выше, чем у женщин. В первые годы жизни у ребенка относительная высота общего центра масс значительно выше, чем у взрослых, в среднем на 10 – 15 %. Высокое расположение ОЦМ характерно для детей дошкольников (большая голова, маленькое тельце ребенка), что наряду со слабым развитием мышц туловища и конечностей обуславливает неустойчивое положение тела. К 5-6 годам высота ОЦМ достигает величин, сравниваемых с высотой положения ОЦМ у взрослых людей. В последующие годы, вплоть до старческого возраста, положение центра общего центра масс остается неизменным и, только возрастная инволюция приводит к смещению его положения. У спортсменов со значительной гипертрофией мышц нижних конечностей (штангисты, футболисты, бегуны) положение ОЦМ находится ниже, чем у людей, не занимающихся спортом. Существенное значение на положение общего центра масс оказывают конституционные особенности. Существуют различные способы определения координат ОЦМ и ЦМ звеньев тела: экспериментальный; 2) аналитический; 3) графический. Одним из наиболее простых, экспериментальных методов исследования является метод взвешивания человека в избранной позе на специальной платформе, имеющей три точки опоры, одна из которых находится на неподвижном основании, а две другие находятся на весах. По показаниям весов без человека, F1 и F2 указывают величину давления на весы самой платформы. Взвесив человека, вновь определяют показания на весах F3 и F4 . Рассматривая по очереди две линии, соединяющие три точки опоры (равносторонний треугольник с вершиной на неподвижной основе) как оси вращения, можно написать уравнение моментов сил для системы, находящейся в равновесии: F4 – F2 F3 – F1 Х = ____________ * h; У = _________ * h, P P где Х и У – координаты ОЦМ, Р – вес тела, h – высота равностороннего треугольника. В другом случае, для определения проекции ОЦМ человека на горизонтальную плоскость, также используют платформу в виде равностороннего треугольника, укрепленной на трех динамометрах, которые установлены на вершинах платформы. В биомеханике наряду с экспериментальными методами используются и аналитические способы определения координат ОЦМ тела человека в фиксированной позе. Аналитические методы базируются на использовании статистических данных о геометрии масс тела человека, которые могут быть представлены в таблицах. Эти таблицы характеризуют связь веса отдельных сегментов тела человека с его общим весом и связь расстояния от проксимального конца сегмента до его центра масс с общей длиной сегмента. Геометрия масс тела (распределение масс тела) характеризуется такими показателями как: вес (масса) отдельных звеньев тела, положение центров масс отдельных звеньев и всего тела, моменты инерции и т. д. Расчетные методы позволяют повысить точность определения индивидуальных биомеханических параметров тела человека. Кроме того, данные могут быть представлены в виде регрессионных уравнений, связывающих массы отдельных звеньев тела с антропометрическими признаками (общим весом, длиной тела и т. д.), либо с координатами их ЦМ. Аналитический способ нахождения координат ЦМ звеньев тела, в основе которого лежит теорема Вариньона, широко применяется при изучении статических положений тела, системы тел и при изучении локомоторных движений: |