Курсовая работа. записка. Н. Э. Баумана Факультет "Робототехники и комплексной автоматизации" Кафедра "Теории механизмов и машин" расчетнопояснительная записка
 Скачать 0.67 Mb. Скачать 0.67 Mb.
|

|
Московский государственный технический университет им. Н.Э.Баумана Факультет “Робототехники и комплексной автоматизации” Кафедра “Теории механизмов и машин” РАСЧЕТНО-ПОЯСНИТЕЛЬНАЯ ЗАПИСКА К курсовому проекту на тему: “Проектирование и исследование механизмов двухцилиндрового поршневого детандера среднего давления” Задание № 105Г Студент Родык О.С. Группа Э4-51 Руководитель проекта ___________ ___Костиков Ю.В.. Москва,2007 г. СОДЕРЖАНИЕ
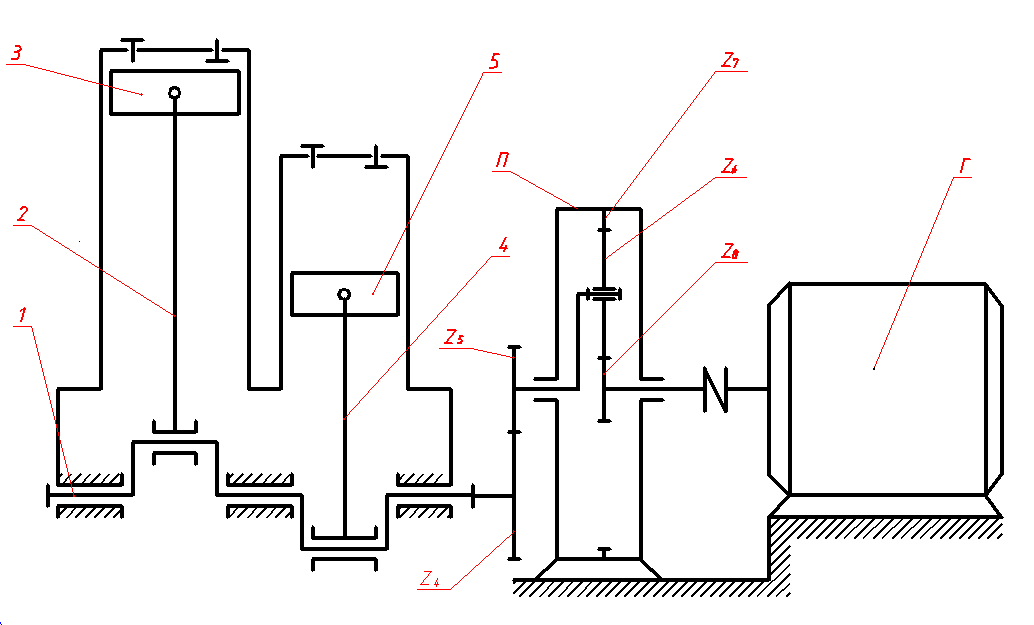
Реферат. Расчетно-пояснительная записка к курсовому проекту. В расчетно-пояснительной записке приведено: проектирование, определение закона движения приведенного звена, расчет дополнительной маховой массы, силовой расчет основного механизма, проектирование цилиндрической эвольвентной зубчатой передачи, проектирование однорядного планетарного редуктора, проектирование кулачкового механизма. Техническое задание. Краткое описание работы механизмов установки. Детандеры предназначены для расширения газа с целью получения в циклах низкотемпературных установок. Преобразование энергии сжатого газа в работу, снимаемую с вала детандера, осуществляется путем действия сил давления газа на поршень и передачи их через механизм движения на тормозную установку. Схема установки вертикального двухцилиндрового поршневого детандера среднего давления показана на рис.1. Воздух высокого давления попеременно поступает в цилиндры детандера и приводит в движение поршни 3, 5 кривошипно-ползунных механизмов 5-4-1 и 3-2-1. далее движение от коленчатого вала 1 передается через простую зубчатую передачу Z4-Z5 и мультипликатор П на тормозное устройство, которым в данной установке является генератор тока Г. Кулачковый механизм применяется в системе газораспределения детандера, обеспечивает работу впускных и выпускных клапанов и имеет принудительный внешний привод (на рисунке не показан). Исходный данные для проектировании и исследования механизмов детандера приведены в таблице 1. Изменение давления воздуха в цилиндрах детандера в зависимости от положения поршня заданы в табл 2. таблица 1
таблица 2
 1. Определение закона движения механизма. 1.1 Проектирование кривошипно-ползунного механизма Проектирование кривошипно-ползунного механизма произведено по средней скорости поршня (ползуна). При этом известными являются следующие параметры: средняя скорость поршня Vср=2.3 м/с, частота вращения вала кривошипа n=6.5 с-1, отношение длин шатуна и кривошипа λ2=lAB / lAO= 4.5. Время одного оборота вала t=1/n, а расстояние, которое проходит поршень за один оборот, S= 4*lOA. Но Vср=S/t, поэтому lOA = Vср/(4.n) lOA = 2.3/(4*6.5)=0.088м lAB = lOA *4.5 = 0.396 м 1.2 Выбор одномассовой динамической модели и расчет кинематических передаточных функций. В качестве динамической модели механизма использовано звено 1, с приложенным к нему суммарным моментом и приведенным к нему суммарным моментом инерции. Ниже приводится расчет этих параметров. Обобщенной координатой является угол поворота звена 1 – φ1, начальным звеном является звено 1. Для определения передаточных функций механизма на листе вычерчена кинематическая схема основного механизма в масштабе μl=500 мм/м. Угол поворота кривошипа разбит на 12 интервалов и, в направлении угловой скорости проставлены номера позиций (с 0 до 11). Для первых шести положений кривошипа (положения 0, 1, 2, 3, 4, 5) построены в произвольном масштабе планы возможных скоростей Для положений 6, 7, 8, 9, 10, 11 планы будут выглядеть аналогично построенным. По соответствующим отрезкам планов определены кинематические передаточные функции (по соответствующим им отрезкам). Результаты расчета передаточных функций приведены в таблице 1.1 Таблица 1.1
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||