Математическое моделирование - Никишев. Н. Ульянова В. К. Никишев Математическое моделирование
 Скачать 6.84 Mb. Скачать 6.84 Mb.
|

|
Тема: Свободное падение тел Цель занятия: Изучить движение тел с высоты h при различных начальных условий: коэффициентов k1,k2, r ( радиуса шарика), плотности среды и формы тела. Задачи занятия: 1. Получить зависимости h=f(t), v=f(t) при начальных значениях r,v0,h0,k1,k2. 2. Получить семейство графиков h=f(t,r), v=f(t,r). 3. Получить зависимость h=f(r), v=f(r) при t - const Модель объекта  Параметры k1 и k2 зависят от свойств среды и геометрии тела. Например, для шарика k1 =6 r (формула Стокса), где - динамическая вязкость среды, r - радиус шарика. Так, для воздуха = 0,0182 Н*с*м-2 при t=20o C и давлении 1 атм. Соответственно для воды = 1,002 Н*с*м-2.. Для малых скоростей составляющей k1 можно пренебречь и Fс = k2*V2, где k2 = 0,5сS ; -плотность среды ; с- коэффициент лобового сопротивления, который зависит от формы тела. Так, для диска в форме прямоугольника с=1.11, для сферы с=1.33 и с=0.55 в зависимости от направления расположения сферы, для шара с=0.4, а для каплевидных тел с=0.045 с=0.1 в зависимости от направления тела. .  Пример. Исследовать падение шарика радиуса R с высоты h Задачи исследования: 1. Получить зависимости h=f(t), v=f(t) при начальных значениях r,v0,h0,k1,k2. 2. Получить семейство графиков h=f(t,r), v=f(t,r). 3. Получить зависимость h=f(r), v=f(r) при t - const Исходные данные:
 var Form4: TForm4; km,r,m,vo,ho,s,p,v,a,dv,da,c:double ; h1,h2,cn,ck,dc,t,dt,y1,y2,dy1,dy2:double; ind,k:integer; arrt,arrv,arra,arrh:array[1..10000] of double; implementation uses Unit1, Unit5; //описание функции function ff(m,km,r,c,s,p,v:double):double; begin ff:=(m*9.8-6*km*Pi*r*v-0.5*c*s*p*v*v)/m; end; //Кнопка возврата к титульному листу procedure TForm4.N3Click(Sender: TObject); begin form5.show; for ind:=0 to 7 do begin form5.Chart1.SeriesList[ind].Clear; form5.Chart2.SeriesList[ind].Clear; end; //Входные параметры r:=strtofloat(edit1.Text);//радиус падующего тела km:=strtofloat(edit2.text);//коэффициент вязкости s:=strtofloat(edit3.Text);//площадь падующего тела p:=strtofloat(edit4.Text);//плотность среды ho:=strtofloat(edit5.Text);//начальная высота vo:=strtofloat(edit6.Text);//начальная скорость m:=strtofloat(edit7.Text);//масса падающего тела c:=0.1;//коэффициент лобового сопротивления среды k:=0;//номер графика // 1 while c<=1.5 do begin ind:=0; t:=0;dt:=0.1; y1:=vo; y2:=ff(m,km,r,c,s,p,vo); while t<=10 do begin form5.Chart1.SeriesList[k].Add(y1,floattostr(t)); dy1:=dt*y2; dy2:=dt*ff(m,km,r,c,s,p,y1); y1:=y1+dy1; y2:=y2+dy2; t:=t+dt; end; c:=c+0.2; k:=k+1; end; //2 k:=0; t:=30;y1:=vo;y2:=ff(m,km,r,c,s,p,vo); while t<=44 do begin c:=0.1; while c<=2 do begin form5.Chart2.SeriesList[k].Add(y2,floattostr(c)); dy1:=dt*y2; dy2:=dt*ff(m,km,r,c,s,p,y1); y1:=y1+dy1; y2:=y2+dy2; c:=c+0.1; end; t:=t+2; k:=k+1; end; end; //Кнопка ввода данных procedure TForm4.N1Click(Sender: TObject); //Кнопка построения графика procedure TForm4.N2Click(Sender: TObject); begin //очистка старых графиков for ind:=0 to 7 do begin form4.Chart1.SeriesList[ind].Clear; form4.Chart2.SeriesList[ind].Clear; end; //Входные параметры r:=strtofloat(edit1.Text);//радиус падующего тела km:=strtofloat(edit2.text);//коэффициент вязкости s:=strtofloat(edit3.Text);//площадь падующего тела p:=strtofloat(edit4.Text);//плотность среды ho:=strtofloat(edit5.Text);//начальная высота vo:=strtofloat(edit6.Text);//начальная скорость m:=strtofloat(edit7.Text);//масса падающего тела cn:=0.1;ck:=1.5;//интервал лобового сопротивления среды dc:=(1.5-0.1)/7;//шаг изменения лобового сопротивления k:=0;//номер графика // цикл по лобовому сопротивлению while cn<=ck do begin v:=vo;//первая производная расстояния по времени- начальная скорость a:=1; //вторая производная расстояния по времени-ускорение ind:=1;//счетчик записи данных в массивы t:=0;//счетчик подчета времени падения тела h1:=ho;//высота с которой падает тело h2:=0; // тело лежит на земле //цикл времени падения тела while h1>=h2 do begin //запись в массивы полученных данных arrh[ind]:=h1;//высота arrv[ind]:=v;//скорость arrt[ind]:=t;//время //вывод графиков form4.Chart1.SeriesList[k].Add(arrh[ind],floattostr(arrt[ind])); form4.Chart2.SeriesList[k].Add(arrv[ind],floattostr(arrt[ind])); // решение дифференциального уравнения методом Эйлера dv:=0.01*a; da:=0.01*ff(m,km,r,cn,s,p,a); v:=v+dv; a:=a+da; h1:=h1-arrv[ind]*arrt[ind];//изменение высоты за время t t:=t+0.01;//изменение времени ind:=ind+1; end; //переход к следующему коэффициенту лобового сопротивления // и соответсвенно к следующему графику k:=k+1; cn:=cn+dc; end; end; procedure TForm4.N4Click(Sender: TObject); begin form4.Hide; f  orm5.hide; orm5.hide;form1.Show; end; 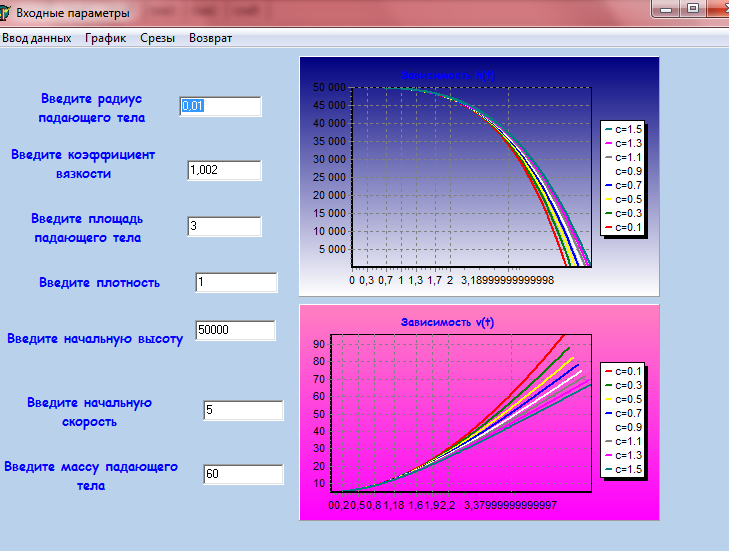 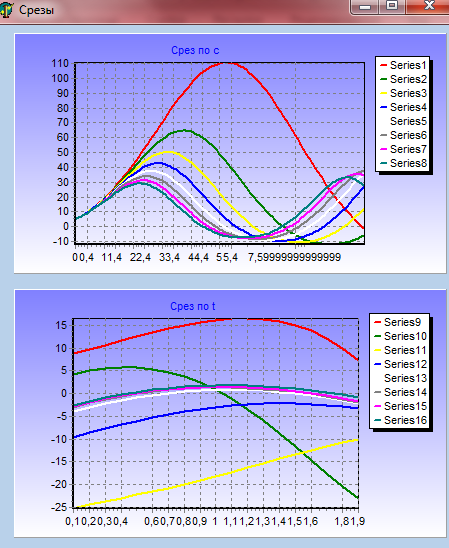 Пример2 . Исследовать падение шарика радиуса R с высоты h в среде MatLab Задачи исследования: 1. Получить зависимости h=f(t), v=f(t) при начальных значениях r,v0,h0,k1,k2. 2. Получить семейство графиков h=f(t,r), v=f(t,r). 3. Получить зависимость h=f(r), v=f(r) при t - const 4. Исследовать в среде MatLab  Исследование системы с использованием программы MatLab. Графики зависимостей v(t), h(t) для r=5mm c помощью решателей ode15,ode45  m-фа M-file f1.m: function F1=pli(t,y) mu=0.018; //динамическая вязкость воздуха p1=800; //плотность шарика p2=1.29; //плотность воздуха c=0.4; //лобовое сопротивление шарика g=9.8; k=1000; //число разбиений r=0.005; //радиус шарика F1=[-y(2);9.8-9*mu/(r*r*p1*2)*y(2)-3*c*y(2)*y(2)*p2/(8*r*p1)]; m-файл для решения ДУ с помощью программы на языке программы MatLab M-file Sambo.m: mu=0.018; //динамическая вязкость воздуха p1=800; //плотность шарика p2=1.29; //плотность воздуха c=0.4; //коэффициент лобового сопротивления для шарика g=9.8; //ускорение свободного падения k=1000; //число разбиений y(2)=0;y(1)=10;//начальные условия x0=0;xk=5;//границы изменения времени dx=(xk-x0)/k; //шаг интегрирования r=0.005; //радиус шарика x=x0; subplot(2,1,1); //деление формы на 2 граф. окна hold on; //обеспечивает продолжение вывода графиков в окно for i=0:k-1 if y(1)<0 break,end;йл для решения ДУ с помощью решетелей // вычисление коэффициентов для метода Рунге - Кутта k11=-dx*y(2);k21=dx*(9.8-3*mu/(r*r*p1*2)-c*pi*y(2)*y(2)*p2/(8*r*p1)); k12=-dx*(y(2)+k21/2); k22=dx*(9.8-3*mu/(r*r*p1*2)-c*pi*(y(2)+k21/2)*(y(2)+k21/2)*p2/(8*r*p1)); k13=-dx*(y(2)+k22/2); k23=dx*(9.8-3*mu/(r*r*p1*2)-c*pi*(y(2)+k22/2)*(y(2)+k22/2)*p2/(8*r*p1)); k14=-dx*(y(2)+k23);k24=dx*(9.8-3*mu/(r*r*p1*2)-c*pi*(y(2)+k23) *(y(2)+k23)*p2/(8*r*p1)); //расчёт разности d1=(k11+2*k12+2*k13+k14)/6; d2=(k21+2*k22+2*k23+k24)/6; //вычисление новых значений у1 и у2 y(11)=y(1)+d1; y(21)=y(2)+d2; plot([x x+dx],[y(1) y(11)],’r’);plot([x x+dx],[y(2) y(21)],’b’), x=x+dx; //новое значение х y(1)=y(11); y(2)=y(21); end; grid on; //добавляет сетку к текущему графику title(“Kpuvue v(t) u h(t) npu r = 5mm”); //установка на графике титульной надписи legend(“vucota”,’ckopoct’); //добавление к текущему графику xlabel('t');ylabel('v,h'); plot([0 5],[0 0],'k');axis tight;hold off; y(2)=0;y(1)=10;x0=0;xk=10;dx=(xk-x0)/k; r0=0.002;rk=0.005;dr=(rk-r0)/3; n=2;x=x0;r=r0; subplot(2,1,2);hold on; while r<=rk for i=0:k-1 if y(1)<0 break,end; k11=-dx*y(2); k21=dx*(9.8-3*mu/(r*r*p1*2)-c*pi*y(2)*y(2)*p2/(8*r*p1)); k12=-dx*(y(2)+k21/2); k22=dx*(9.8-3*mu/(r*r*p1*2)-c*pi*(y(2)+k21/2)*(y(2)+k21/2)*p2/(8*r*p1)); k13=-dx*(y(2)+k22/2); k23=dx*(9.8-3*mu/(r*r*p1*2)-c*pi*(y(2)+k22/2)*(y(2)+k22/2)*p2/(8*r*p1)); k14=-dx*(y(2)+k23); k24=dx*(9.8-3*mu/(r*r*p1*2)-c*pi*(y(2)+k23)*(y(2)+k23)*p2/(8*r*p1)); d1=(k11+2*k12+2*k13+k14)/6; d2=(k21+2*k22+2*k23+k24)/6; y(11)=y(1)+d1; y(21)=y(2)+d2; plot([x x+dx],[y(1) y(11)],'r'); plot([x x+dx],[y(2) y(21)],'b'); x=x+dx; y(1)=y(11); y(2)=y(21); end; x=x0; y(2)=0; y(1)=10; r=r+dr; end;grid on; title('Cemeuctvo v(t) u h(t): 2mm < r < 5mm'); legend('vucota','ckopoct');xlabel('t');ylabel('v,h'); plot([0 5],[0 0],'k');axis tight;hold off; Графики зависимостей v(t),h(t) при r=5 mm и семейство графиков для 2mm   Simulink  Пример3. Исследовать движение исследовательского зонда вертикально вверх с летящего самолета Условие Промоделировать движение исследовательского зонда, «выстреленного» вертикально вверх с летящего над землей самолета. В верхней точке траектории над зондом раскрывается парашют, и он плавно спускается на землю. Входные параметры. Математическая модель свободного падения тела - уравнение второго закона Ньютона с учетом двух сил, действующих на тело -силы тяжести и силы сопротивления среды. Движение является одномерным; проецируя силу, скорость и перемещение на ось, направленную вертикально вверх, получаем Входные параметры модели: ¦ начальная высота тела; ¦ начальная скорость тела; ¦ величины, определяющие коэффициенты сопротивления среды function FmO=fun(t,y) tv=10; a=100; g=9,8 mn=10000; mk=3000; m=mn-a*t; ifm>mk else m=mk end; mm=m; if t>=tv p=0; m=500; else p=1000000; m=mam; end; FmO=[(p*cos(y(2))-cos(y(2))-g*sin(y(2)))/m; ((p*sin(y(2))+sin(y(2)))/m- g*cos(y(2)))/y(l);-y(l)*cos(y(2))/10;y(l)*sin(y(2))/10]; Y0=[1000 pi/2 0 600]; [T,Y]=odel5s(@fun,[0 1000],Y0); plot(Y(:53),Y(:,4),’g’); hold on; title(“zavisimost visoti ot vremeni”); xlabel(fts’); у1аЬеl(Ът’); axis([0,5000,0,2000]);  Пример. Исследование динамики объектов, брошенных под углом к горизонту. Цель занятия: Получить практические навыки исследования объектов, динамика которых описывается дифференциальными уравнениями 2-го порядка с использованием языков программирования :Delphi, VC++, VC# и информационных технологий MatLab. Задачи занятия: 1. Разработка алгоритмов 2. Построение семейства кривых y(x), dy/dx(x) при параметрах a-const, a-var 3. Получение зависимостей y(a), dy/da при x-const 4. Анализ результатов исследований. Задания для проведения лабораторной работы Д инамика объекта описывается системой дифференциальных уравненийmdvx/dt = -Fccosq; =-Fcvx/v0 mdvy/dt = -m*g - Fcsinq,=-m*g - Fcvy/v0, где Fc =k1V+ k2*V2 - линейная и квадратичная составляющая сопротивления воздуха. 2. Динамика объекта может представляется и алгебраическими уравнениями вида var Form1: TForm1; xdp,ydp:integer; x0,y0:integer; alfa,veloc:real; intravel:boolean=false; // выводит результатскорости и направления function rtostr(t:real):string; var e:string; begin str(t:4:1,e); result:=e; end; //выход procedure TForm1.Button1Click(Sender: TObject); begin halt; end; // рисует стрелку , выводит скорость и направление procedure drawmousec; begin with form1.paintbox1.Canvas do begin pen.Mode:=pmXor; moveto(x0,y0); Lineto(xdp,ydp); alfa:=pi/2-arctan((ydp-y0)/(xdp-x0)); Lineto(trunc(xdp+15*cos(-pi/2-alfa+pi/10)),trunc(ydp+15*sin(-pi/2-alfa+pi/10))); moveto(xdp,ydp); Lineto(trunc(xdp+15*cos(-pi/2-alfa-pi/10)),trunc(ydp+15*sin(-pi/2-alfa-pi/10))); end; alfa:=arctan((y0-ydp)/(xdp-x0)); form1.label1.Caption:='Направление: '+rtostr(alfa/pi*180)+' ; скорость: '+rtostr(veloc/50)+' '; veloc:=sqrt(sqr(ydp/1-y0)+sqr(xdp/1-x0)); end; // задает камень procedure TForm1.PaintBox1Paint(Sender: TObject); begin if intravel then exit; paintbox1.Canvas.pen.color:=clwhite; paintbox1.Canvas.brush.color:=clwhite; drawmousec; end; //координаты замка procedure TForm1.FormCreate(Sender: TObject); begin xdp:=shape31.Left; ydp:=shape31.Top; x0:=shape25.left+shape25.width div 2; y0:=shape25.top+shape25.height div 2; end; var dr:boolean=false; //передвижение мышки вниз procedure TForm1.PaintBox1MouseDown(Sender: TObject; Button: TMouseButton; Shift: TShiftState; X, Y: Integer); begin if (x>x0)and(y dr:=true; drawmousec; ydp:=y;xdp:=x; drawmousec; end; end; //передвижение мыши (стелки) procedure TForm1.PaintBox1MouseMove(Sender: TObject; Shift: TShiftState; X, Y: Integer); begin if (dr)and(x>x0)and(y drawmousec; ydp:=y;xdp:=x; drawmousec; end; end; // бросок procedure TForm1.Button2Click(Sender: TObject); const dt=0.01; g=9.81; var x,y,vx,vy,xo,yo:real; bad:boolean; r:integer; begin intravel:=true; drawmousec; vx:=veloc*cos(alfa); vy:=veloc*sin(alfa); x:=shape25.Left+shape25.height div 2;y:=shape25.Top+shape25.width div 2;r:=0; repeat xo:=x;yo:=y; x:=x+vx*dt;y:=y-vy*dt;inc(r); if r=10 then begin sleep(1); r:=0; end; vy:=vy-g*dt; paintbox1.Canvas.pen.Mode:=pmCopy; paintbox1.Canvas.pen.color:=clgreen; paintbox1.Canvas.brush.color:=clgreen; paintbox1.Canvas.Ellipse(trunc(xo-4),trunc(yo-4),trunc(xo+5),trunc(yo+5)); paintbox1.Canvas.pen.color:=clwhite; paintbox1.Canvas.brush.color:=clwhite; paintbox1.Canvas.Ellipse(trunc(x-3),trunc(y-3),trunc(x+4),trunc(y+4)); //trying to end the journey... bad:=true; if (y>y0/1)or(y<=0) then break; if x>=shape15.Left then begin if (x<=shape15.Left+shape15.width)and((y (y>shape16.Top+shape16.height)) then break; end; if x>=shape22.Left then begin if (y (y>shape22.Top+shape22.height) then break else begin bad:=false; break; end; end; until false; intravel:=false; if bad then begin sleep(1000); paintbox1.Repaint; // drawmousec; end else begin shape32.Visible:=true; label2.Visible:=true; sleep(1000); paintbox1.Repaint; // drawmousec; end; end; // изменение размеров замка procedure TForm1.Shape32MouseDown(Sender: TObject; Button: TMouseButton; Shift: TShiftState; X, Y: Integer); begin shape32.Visible:=false; label2.Visible:=false; end; //вывод результатов procedure TForm1.Label2MouseDown(Sender: TObject; Button: TMouseButton; Shift: TShiftState; X, Y: Integer); begin shape32.Visible:=false; label2.Visible:=false; end; // изменение координат замка procedure TForm1.Splitter1CanResize(Sender: TObject; var NewSize: Integer; var Accept: Boolean); begin accept:=false; if newsize>=50 then begin accept:=true; end; end; // изменение координат замка procedure TForm1.Splitter1Moved(Sender: TObject); begin halt; end; var s1d:boolean=false; var s2d:boolean=false; var s3d:boolean=false; var s4d:boolean=false; var s5d:boolean=false; procedure TForm1.PaintBox2MouseDown(Sender: TObject; Button: TMouseButton; Shift: TShiftState; X, Y: Integer); begin s1d:=true; end; // изменение координатов замка мышью procedure TForm1.PaintBox2MouseMove(Sender: TObject; Shift: TShiftState; X, Y: Integer); begin if (s1d)and(shape15.Left+x>=50)and(shape15.Left+shape15.Width+x+50<=shape21.left) then begin paintbox2.left:=paintbox2.left+x; paintbox3.left:=paintbox3.left+x; paintbox4.left:=paintbox4.left+x; shape15.Left:=shape15.Left+x; shape16.Left:=shape16.Left+x; shape17.Left:=shape17.Left+x; shape18.Left:=shape18.Left+x; shape19.Left:=shape19.Left+x; shape20.Left:=shape20.Left+x; shape23.Left:=shape23.Left+x; shape23.Width:=form1.width; end; end; //передвижение мыши для изменения координат замка вверх procedure TForm1.PaintBox2MouseUp(Sender: TObject; Button: TMouseButton; Shift: TShiftState; X, Y: Integer); begin s1d:=false; end; //передвижение мыши для изменения координат замка вниз procedure TForm1.PaintBox3MouseDown(Sender: TObject; Button: TMouseButton; Shift: TShiftState; X, Y: Integer); begin s2d:=true; end; // изменение координатов замка мыщью procedure TForm1.PaintBox3MouseMove(Sender: TObject; Shift: TShiftState; X, Y: Integer); begin if (s2d)and(shape15.Width+x>=10)and(shape15.Left+shape15.Width+x+50<=shape21.left) then begin shape15.Width:=shape15.Width+x; shape16.Width:=shape16.Width+x; paintbox3.left:=paintbox3.left+x; shape17.width:=shape15.width+20; shape17.left:=shape15.left-10; paintbox4.width:=shape15.width+20; paintbox4.left:=shape15.left-10; shape18.width:=shape17.width div 5; shape19.width:=shape17.width div 5; shape18.left:=shape17.left; shape19.left:=shape17.left+shape17.width div 5*2; shape20.left:=shape17.left+shape17.width div 5*4; shape20.width:=shape17.left+shape17.width-shape20.left; end; end; //передвижение мыши для изменения координат замка вверх procedure TForm1.PaintBox3MouseUp(Sender: TObject; Button: TMouseButton; Shift: TShiftState; X, Y: Integer); begin s2d:=false; end; //передвижение мыши для изменения координат замка вниз procedure TForm1.PaintBox4MouseDown(Sender: TObject; Button: TMouseButton; Shift: TShiftState; X, Y: Integer); begin s3d:=true; end; //передвижение мыши для изменения координат замка вверх procedure TForm1.PaintBox4MouseUp(Sender: TObject; Button: TMouseButton; Shift: TShiftState; X, Y: Integer); begin s3d:=false; end; //передвижение мыши для изменения координат procedure TForm1.PaintBox4MouseMove(Sender: TObject; Shift: TShiftState; X, Y: Integer); begin if (s3d)and(shape17.top+y>=100)and(shape16.Top+shape16.Height+y+20<=shape23.Top) then begin shape17.top:=shape17.top+y; shape18.top:=shape18.top+y; shape19.top:=shape19.top+y; shape16.top:=shape16.top+y; shape20.top:=shape20.top+y; shape15.top:=shape15.top+y; paintbox4.top:=paintbox4.top+y; paintbox3.top:=paintbox3.top+y; paintbox2.top:=paintbox2.top+y; shape15.height:=form1.height-shape15.top; paintbox2.height:=form1.height-paintbox2.top; paintbox3.height:=form1.height-paintbox3.top; end; end; //передвижение мыши для изменения координат замка вниз procedure TForm1.PaintBox5MouseDown(Sender: TObject; Button: TMouseButton; Shift: TShiftState; X, Y: Integer); begin s4d:=true; end; //передвижение мыши для изменения координат замка вверх procedure TForm1.PaintBox5MouseUp(Sender: TObject; Button: TMouseButton; Shift: TShiftState; X, Y: Integer); begin s4d:=false; end; //передвижение мыши для изменения координат замка procedure TForm1.PaintBox5MouseMove(Sender: TObject; Shift: TShiftState; X, Y: Integer); begin if (s4d)and(shape22.top+y-10>=shape21.top)and(shape22.Top+shape22.Height+y+10<=shape23.Top) then begin shape22.top:=shape22.top+y; paintbox5.top:=paintbox5.top+y; paintbox6.top:=paintbox6.top+y; end; end; //передвижение мыши для изменения координат замка вниз procedure TForm1.PaintBox6MouseDown(Sender: TObject; Button: TMouseButton; Shift: TShiftState; X, Y: Integer); begin s5d:=true; end; //передвижение мыши для изменения координат замка вверх procedure TForm1.PaintBox6MouseUp(Sender: TObject; Button: TMouseButton; Shift: TShiftState; X, Y: Integer); begin s5d:=false; end; procedure TForm1.PaintBox6MouseMove(Sender: TObject; Shift: TShiftState; X, Y: Integer); begin if (s5d)and(shape22.height+y>=25)and(shape22.Top+shape22.Height+y+10<=shape23.Top) then begin shape22.height:=shape22.height+y; paintbox6.top:=paintbox6.top+y; end; end; procedure TForm1.PaintBox1MouseUp(Sender: TObject; Button: TMouseButton; Shift: TShiftState; X, Y: Integer); begin dr:=false; end; end.   Пример модели движения небесных тел По закону всемирного тяготения сила притяжения, действующая между двумя телами, пропорциональна их массам и обратно пропорциональна квадрату расстояния между ними. В этой формуле G=6,67*10-11 m3/(kг*с2) -гравитационная постоянная. В данной системе координат начало координат расположено на одном теле M. Уравнения, описывающие движение тела m в указанной системе координат, имеет вид В проекциях на оси координат уравнение можно привести с следующей системе из 4-х дифференциальных уравнений  П  ример 2. Исследовать выполнение второго закона Кеплера при движении различных планет. ример 2. Исследовать выполнение второго закона Кеплера при движении различных планет.  unit Unit2; var Form2: TForm2; angle,j,k,kx,ky,ra,rb,e,x,y,va,vb,vc,a,t,t2,speed:real; xc,yc,w,h,xf,n,cc,step:integer; flag:boolean; implementation uses Unit1, Unit3; {$R *.dfm} procedure TForm2.FormClose(Sender: TObject; var Action: TCloseAction); begin form1.close; end; procedure TForm2.BitBtn1Click(Sender: TObject); var rrr:trect; aa,bb,cc:integer; s:string; begin // дано val(form1.edit1.text,ra,cc); if cc<>0 then ra:=1; val(form1.edit2.text,e,cc); if cc<>0 then e:=0.0167; val(form1.edit3.text,vc,cc); if cc<>0 then vc:=0.9856; t:=360/vc; t2:=t/2; flag:=true; // вычисляем va:=vc*sqrt((1+e)/(1-e)); vb:=vc*sqrt((1-e)/(1+e)); a:=(va-vb)/t2; val(edit1.Text,step,cc); if cc<>0 then step:=1; str(va:3:11,s); label1.caption:=s; str(vb:3:11,s); label2.caption:=s; str(vc:3:11,s); label3.caption:=s; rb:=ra*sqrt(1-e*e); // графика w:=image1.Width; h:=image1.Height; xc:=w div 2; yc:=h div 2; kx:=ra/(xc-50); ky:=rb/(yc-50); if kx>ky then k:=(xc-20)/ra else k:=(yc-20)/rb; timer1.Enabled:=true; aa:=round(ra*k); bb:=round(rb*k); image1.Canvas.Brush.Color:=clnavy; rrr:=rect(0,0,w,h); image1.Canvas.FillRect(rrr); image1.Canvas.Brush.Color:=clwhite; rrr:=rect(xc-aa,yc-bb,xc+aa,yc+bb); image1.Canvas.Ellipse(rrr); cc:=3; image1.Canvas.Brush.Color:=clnavy; rrr:=rect(xc-aa+cc,yc-bb+cc,xc+aa-cc,yc+bb-cc); image1.Canvas.Ellipse(rrr); xf:=round(ra*e*k); cc:=30; image1.Canvas.Brush.Color:=clyellow; rrr:=rect(xc+xf+cc,yc+cc,xc+xf-cc,yc-cc); image1.Canvas.Ellipse(rrr); cc:=6; image1.Canvas.Brush.Color:=clred; rrr:=rect(xc-xf+cc,yc+cc,xc-xf-cc,yc-cc); image1.Canvas.Ellipse(rrr); rrr:=rect(xc+xf+cc,yc+cc,xc+xf-cc,yc-cc); image1.Canvas.Ellipse(rrr); angle:=0; n:=0; speed:=va; j:=pi/180; end; procedure TForm2.Timer1Timer(Sender: TObject); var rrr:trect;s:string;i:integer; begin image1.Canvas.MoveTo(xc+xf,yc); image1.Canvas.pen.Color:=clyellow; ifangle<360 then image1.Canvas. LineTo (xc+round(ra*cos(angle*j)*k), (c-round(rb*sin(angle*j)*k)); for i:=1 to step do begin inc(n); if angle<180 then speed:=speed-a else speed:=speed+a; angle:=angle+speed; end; str(speed:3:11,s); label4.Caption:=s; if angle>=(360-a) then begin timer1.Enabled:=false; flag:=false; end; cc:=6; image1.Canvas.Brush.Color:=clred; rrr:=rect(xc-xf+cc,yc+cc,xc-xf-cc,yc-cc); image1.Canvas.Ellipse(rrr); rrr:=rect(xc+xf+cc,yc+cc,xc+xf-cc,yc-cc); image1.Canvas.Ellipse(rrr);end; procedure TForm2.BitBtn2Click(Sender: TObject); begin if flag then timer1.enabled:=not timer1.enabled; end; procedure TForm2.BitBtn3Click(Sender: TObject); begin form2.Hide; form1.Show;end; procedure TForm2.BitBtn4Click(Sender: TObject); begin form2.Hide; form3.Show; end;end.  2.4 Лабораторные работы по разработке имитационных моделей Пример. Разработка информационной модели студента ( учащихся) Цель занятия: Получить практические навыки в разработке информационных систем в среду БД Access , Excel Задачи занятия: 2. Создать графическую модель студента с отображением диаграммы оценок по темам конкретной дисциплины Информационная модель студента Предметная информационная модель знаний студентов курса или факультета позволит получить следующие характеристики учебного процесса: - качество обучения в целом по университету, факультету, курсу и успеваемость отдельных студентов; -стабильность обучения по отдельным предметам, темам и дисциплинам; - прогнозирование результатов обучения в предстоящем семестре; -систематическое уточнение модели знаний студентов с использованием тестовых программ; - разработка индивидуальных вопросов и задач на основе моделей знаний студентов; - сравнительные оценки состояния учебного процесса как на факультете, так и по университету в целом. Пример имитационной модели знаний студентов в среде Excel   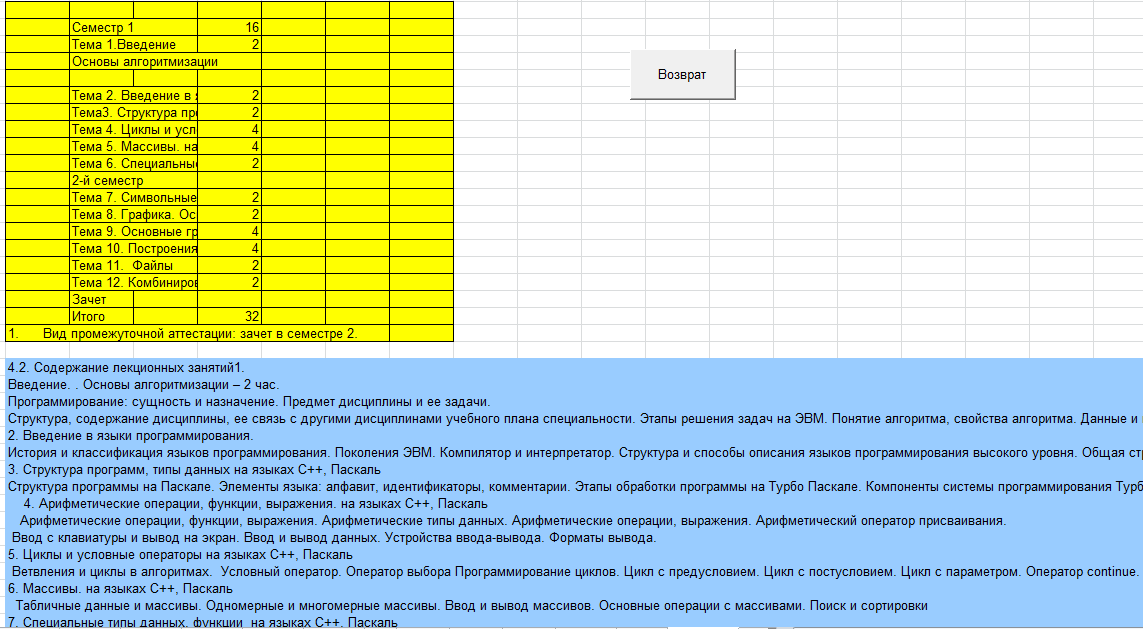 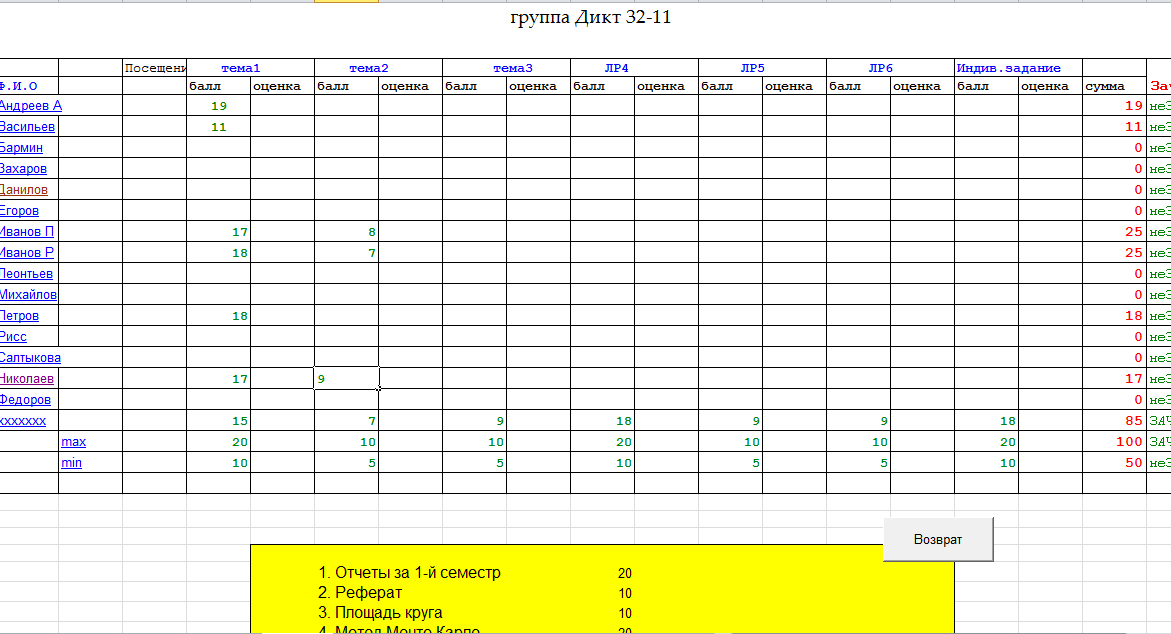 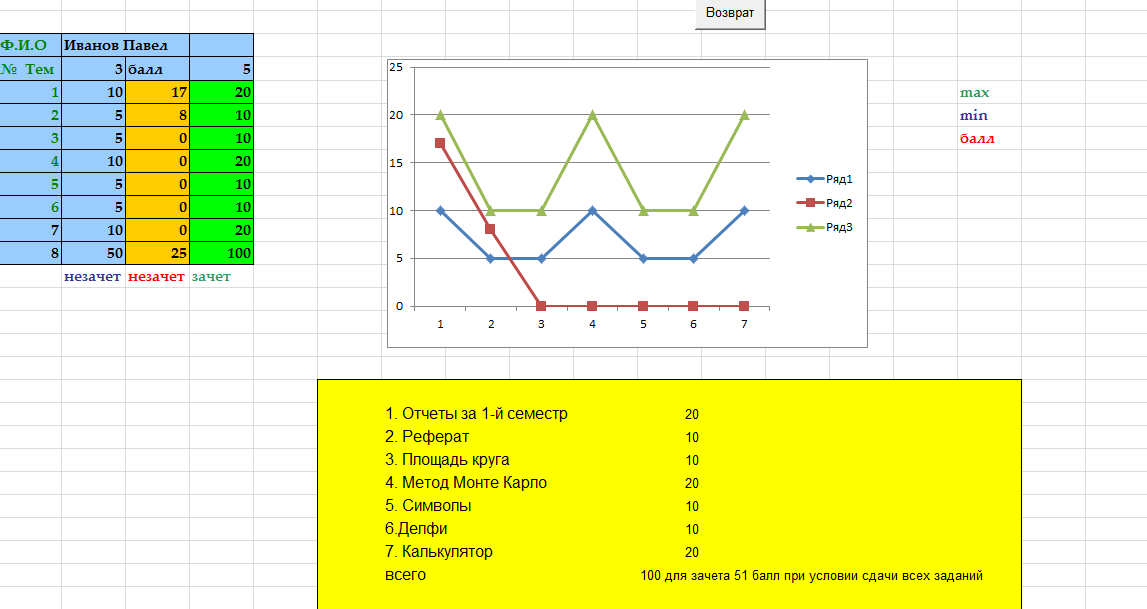       Пример имитационной модели учащихся школы в среде Access           2.5 Разработка моделей транспортных задач Пример. «Размещения предприятий» Исходные условия. Пусть в нескольких пунктах расположены предприятия, производящие некоторый продукт. В пунктах размещаются потребители готовой продукции с соответствующими потребностями . Затраты на производство единицы продукта в пункте равны , обьем производства в этом пункте равен , а затраты по транспортировке единицы продукта из i в j равны . Количество перевезенных продуктов из i в j составляет единиц. Уравнения модели: 1.(перевозится неотрицательное количество продукта); 2. (выпускаемое количество продукта не больше возможного обьема производства и равно вывозимому количеству продукта); 3. , j=1,...,n (потребности потребителей), (каждый пункт потребления получает столько, сколько ему требуется). Конечная цель. Необходимо получить минимальные затраты на производство и на транспортировку продукции, т.е. обеспечить минимум функции , где - затраты на производство, - затраты на транспортировку. Целевая функция состоит из аналогичной целевой задачи. Однако, различие состоит в том, что здесь добавляются затраты на производство. Для однотипности подхода к решению этих двух моделей добавляется фиктивный пункт с характеристикой: потребность равна разности между возможным обьемом производства продукта и суммарной потребнос , где - затраты на производство, - затраты на транспортировку. Ц  Пример Моделирование системы планирования на основе метода сетевого графа Задачи исследования Необходимо спланировать временный график работ в соответствии с графом и вычислить критический путь выполнения всех работ Исходные данные Задание: Дана схема, нужно найти критический путь 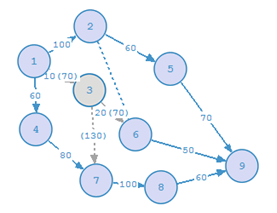 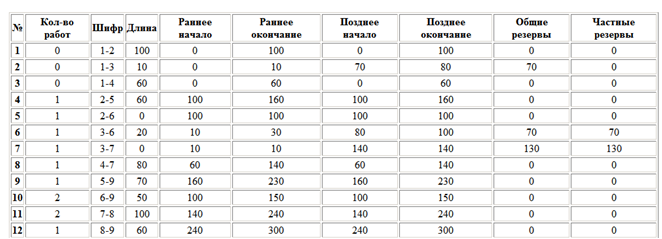  Пример. Планирование производства товаров на основе модели получения максимальной прибыли с использованием метода линейного программирования Условие. Пусть предприятие производит столы и стулья. Расход ресурсов на их производство и прибыль от их реализации представлены в таблице. столы стулья объем ресурсов Расход древесины на изделие, м3 0,5 0,04 200 Расход труда(чел-час) 12 0,6 1800 Прибыль от реализации единицы изделия , руб 180 20 Кроме того на производство 80 столов имеется заказ с министерством Уравнения1-количество столов х2 - количество стульев 0,5 х1 + 0,04х2<=200 12x1 + 0,6x2 <=18000 x1+20x2 =max ( целевая функция)      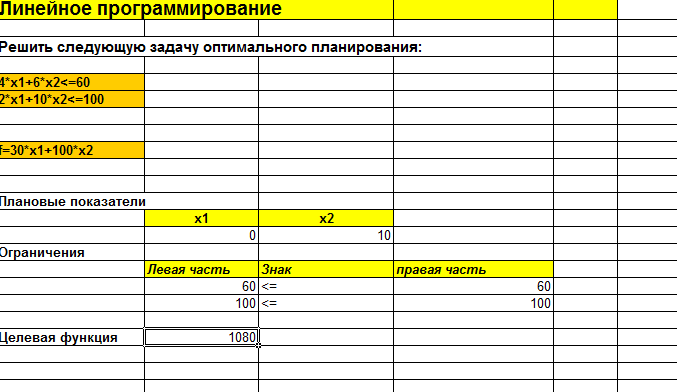 unit 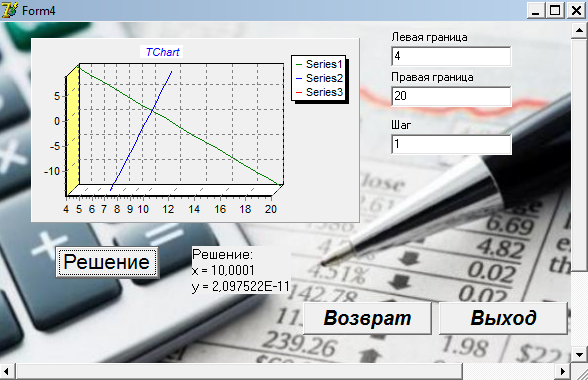 Unit4; procedure TForm4.Button3Click(Sender: TObject); begin close(); end; procedure TForm4.Button1Click(Sender: TObject); begin form1.visible:=true; form4.visible:=false; end; function Fy(x:real): real; begin Fy := (60-6*x)/4; end; function Fx(x:real): real; begin Fx :=(100+2*x)/10; end; procedure TForm4.Button2Click(Sender: TObject); var a, b ,h, x1, y, x2: Double; begin Chart1.Series[0].Clear; Chart1.Series[1].Clear; Chart1.Series[2].Clear; a := StrToFloat(LabeledEdit1.Text); //левая граница b := StrToFloat(LabeledEdit2.Text); //правая граница h := StrToFloat(LabeledEdit3.Text); //шаг x1 := a; repeat y := Fy(x1); x2 := Fx(y); hart1.Series[0].AddXY(x1,y,FloatToStrF(x1,ffGeneral,4,3),clRed); //график F(x) hart1.Series[1].AddXY(x2,y,FloatToStrF(y,ffGeneral,4,3),clGreen); //график F(y) x1 := x1 + h; //приращение координат until x1 > b; x1 := a; repeat y := Fy(x1); x2 := Fx(y); x1 := x1 + h/10000; if ( x1 < x2 + h/10000 ) and ( x1 > x2 - h/10000 ) then begin Label5.Caption := 'Решение: ' +#13+ 'x = '+FloatToStrF(x1,ffGeneral,7,7)+#13; Label5.Caption :=Label5.Caption + 'y = '+FloatToStrF(y,ffGeneral,7,7); Chart1.Series[2].AddXY(x1,y,FloatToStrF(x1,ffGeneral,4,3),clBlue); end; until x1 > b; end;end. 2.9 Лабораторная работа |