управление судном книга. На якоре 203 Штормовые диаграммы 184186 Штормовые условия в дрейфе
 Скачать 3.93 Mb. Скачать 3.93 Mb.
|

|
б — индикатор ситуации с относительным лагом (режим ЛИД); а — индикатор ситуации с абсолютным лагом (режим ЛИД) На определение курса и скорости цели существенно влияет выбор датчика скорости: относительный или абсолютный лаг. Для целей расхождения судов в море подача на САРП информации от абсолютного лага представляет опасность и не столько с точки зрения точности, сколько с точки зрения возможных погрешностей интерпретации ситуации. Например, при использовании двухкоординатного абсолютного лага в случае расхождения со встречной целью на течении, направленном в борт судна, на экране индикатора вместо ситуации расхождения на встречных курсах будет наблюдаться ситуация пересекающихся курсов. Это может привести к неверной оценке ситуации и выбору неверного маневра, например попытке разойтись со встречным судном уменьшением скорости (рис. 20.7). Особенности работы в режиме проигрывания маневра. Проигрывание маневра достигается путем введения предполагаемого курса своего судна и его предполагаемой скорости, а также временной задержки от проигрывания маневра до его осуществления. При включении режима проигрывания, маневра ЭВМ продолжает сопровождение целей и обычную работу по расчету фактических DKP, tKP, но на экран индикатора подается не фактическая обстановка, а предполагаемая после осуществления маневра. Учитывая опасность принять прогнозируемую ситуацию за развивающуюся фактически, в САРП предусматривается ряд мер, направленных на предупреждение подобной ошибки. Кнопка «Имитация маневра» часто делается подпружиненной, так что при ее отпускании сразу подается на экран фактически развивающаяся ситуация, или зажигается табло «Имитация маневра». Метод изображения при проигрывании маневра может быть статическим и динамическим. В первом случае изображаются векторы относительного движения, которые будут результатом предполагаемого маневра. Во втором случае все сопровождаемые суда и свое судно заставляют перемещаться со скоростью, во много раз больше реальной (примерно в 30 раз), показывая в каждом из промежуточных положений промежуточные ЛОД. Проигрывание маневра может осуществляться и в режиме ЛИД. При проигрывании маневра учитываются задержка времени до выполнения маневра и динамические свойства судна. Судоводитель, наблюдая за предполагаемым развитием ситуации, подбирает необходимое изменение курса и (или) скорости своего судна. В момент отпускания кнопки «Имитация маневра» ЭВМ запоминает последние значения предполагаемых курса и скорости своего судна. Спустя предварительно установленное судоводителем время за держки загорается табло «Начать маневр», и высвечиваются значения /Си» и VKU которые были подобраны в режиме имитации маневра. Автоматический выбор маневра. В ряде САРП предусмотрен автоматический выбор маневра курсом по расхождению на заданной дистанции. В этом случае судоводитель задает дополнительно сторону изменения курса. ЭВМ вычисляет автоматически необходимое изменение курса и показывает на экране развитие ситуации в случае осуществления выбранного маневра. Окончательное решение на осуществление предложенного ЭВМ маневра принимает судоводитель. Возвращение к прежним элементам движения. Как и при маневре на расхождение, перед маневром по возвращению и прежним элементам движения необходимо использовать устройство проигрывания маневра. Следует помнить, что этот маневр также должен быть своевременным, решительным и заметным. Встречающаяся практика возвращения на прежний курс по этапам путем «обхода вокруг цели» затрудняет возможность наблюдателя на других судах четко определить маневр. Такую практику следует считать несоответствующей МППСС-72 и хорошей морской практике.
Сопровождение неподвижных объектов. САРП могут быть взяты на сопровождение неподвижные точечные объекты (плавмаяки, буи, небольшие островки). В ряде САРП имеется также возможность непрерывного сопровождения приметных деталей протяженных объектов (например, мысов, волноломов и т. д.). Выводя на формуляр данные о пеленге и дистанции сопровождаемого объекта судоводитель имеет возможность непрерывно контролировать эти навигационные параметры, своевременно корректировать движение своего судна, например, при осуществлении поворота на новый кур'с по радиолокационному пеленгу и дистанции или плавании в узкости с использованием нанесенной на карту сетки пеленгов и дистанций. Целесообразно использовать САРП и для обычных навигационных определений, так как навигационные параметры измеряются САРП точнее, чем оператором РЛС. Привязка к наземным объектам. При плавании в районах с приливно-отливным течением изображения береговой черты неподвижных объектов будут смещаться на экране индикатора САРП, что может быть неудобно при навигационном использовании. В этом случае по результатам сопровождения неподвижных объектов могут быть определены параметры течения и введены соответствующие поправки. В ряде САРП имеется устройство автоматического ввода этих поправок. Подключение этого устройства аналогично переходу от относительного лага к абсолютному и может привести к'неверному представлению ракурсов целей (см. рис. 20.7). Метод параллельных индексов. В ряде САРГ1 имеются устройства для проведения линий через произвольные точки экрана индикатора ситуации. Эти линии могут быть использованы для проведения границ опасных зон (рис. 20.8) или параллельных индексов, по которым должен перемещаться приметный радионавигационный ориентир при движении судна по заданной траектории без отклонений. Параллельные индексы проводятся от навигационного ориентира и поворотных точек в сторону, противоположную курсу судна (рис. 20.9). Рис. 20.8. Проведение ограничительных линий на экране индикатора: 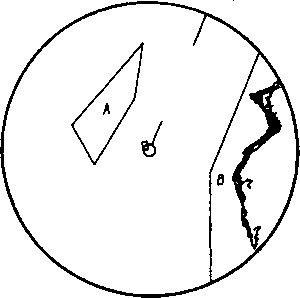 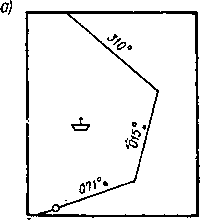 Л—отдельно лежащая банка: В — прибрежная отмель Л—отдельно лежащая банка: В — прибрежная отмельРис. 20.9. Использование метода параллельных индексов: а — прокладка на навигационной карте; б — траектория относительного перемещения плав* маяка на индикаторе ситуации 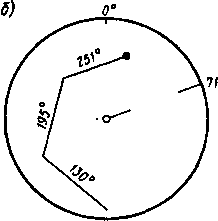 Электронные карты. В целом ряде САРП имеется возможность создания и хранения электронных карт. Для создания электронной карты в запоминающее устройство по координатам точек вводят рекомендованные пути, системы разделения, наиболее важные буи и плавмаяки. Стабилизация электронной карты осуществляется по выбранным оператором неподвижным точечным радиолокационным ориентирам. Хранение в памяти нескольких карт одновременно и их поочередный вызов на индикатор дают возможность перекрывать значительную часть маршрута перехода. Наличие на экране электронной карты значительно упрощает не только обеспечение навигационной безопасности, но и общую оценку обстановки, включая учет предполагаемых маневров целей. В то же время вследствие используемой стабилизации относительно грунта при больших значениях сноса из-за ветра и течения возможна неверная оценка ракурсов целей.
Встроенный контроль. В большинстве САРП имеется устройство встроенного контроля, проверяющее работоспособность каждого печатного узла. В случае отсутствия сигнала в каком-либо узле на панели управления включаются звуковой и световой сигналы отказа. Звуковой сигнал отключается нажатием кнопки «Отказ». При этом, как правило, производится дополнительный пуск программы. Если отказ был следствием случайного сбоя, звуковой и световой сигналы отказа выключаются и САРП начинает нормальную работу. Следствием такого отказа из-за случайного сбоя будет временное отсутствие информации о ЛОД и ЛИД целей, так как они будут захватываться и обрабатываться как вновь обнаруженные. Если работа велась в режиме ручного захвата, после сбоя необходимо повторить захват ранее сопровождавшихся целей. Если после попытки дополнительного пуска программы продолжает подаваться сигнал «Отказ», необходимо устранение неисправности. При этом либо на индикаторе высвечивается номер вышедшего из строя узла, либо на торце соответствующего узла загорается сигнал, указывающий на его неисправность. Следует иметь в виду, что встроенный контроль не обеспечивает 100 % гарантии обнаружения неисправной работы САРП, поэтому оператор должен использовать и другие способы контроля исправной работы САРП. Тестовый контролы В большинстве САРП для проверки исправности и точности работы вычислительного комплекса предусматривается возможность включения контрольного теста: условной задачи с известными ответами. Правильность решения проверяется сопоставлением результатов решения с ответами или оператором по виду контрольного изображения на экране индикатора ситуации. Тестовый контроль проводится автоматически через определенный интервал времени (например, 1 ч) или включается по запросу оператора. В период прохождения тестового контроля продолжаются нормальное функционирование САРП, сопровождение целей и вычисление данных. Если оператор нажатием кнопки «Тест» вызвал на экран контрольное изображение, сразу после отпускания этой кнопки (как правило, подпружиненной) на экране восстанавливается фактическая ситуация. Контроль ввода данных. В САРП осуществляется контроль данных, вводимых автоматически или оператором. В случае потери данных, поступающих от лага и гирокомпаса, срабатывает предупредительная сигнализация. При ручном вводе проверяется соответствие данных установленным для данной САРП пределам и в случае несоответствия (например, ввод курса свыше 360°) ввод этих данных блокируется. Для исправления ошибки необходимо произвести сброс неверно набранных данных и повторить ввод. Признаки нормальной работоспособности САРП. Оператор должен хорошо знать признаки нормального функционирования САРП во всех режимах работы с тем, чтобы своевременно заметить возможные отклонения. Основными признаками нормальной работы САРП являются: наличие на экране индикатора вторичной информации (символы сопровождения, векторы, формуляр); 1 совпадение символов сопровождения с эхо-сигналами (если на индикатор подается и первичная информация); устойчивость положения векторов; соответствие направления векторов цифровому формуляру; наличие подсветки сигнальных табло и клавиш и их нормальное функционирование. Признаки нормальной работоспособности конкретных САРП приводятся в инструкциях по их эксплуатации. Очень важным при эксплуатации САРП является знание оператором основных закономерностей относительного движения, видов ЛОД ' и тенденций их изменения при маневре судна-наблюдателя или цели. Подготовленный оператор в случае неправильного функционирования САРП должен своевременно заметить несоответствие выдаваемых САРП данных реальной обстановке. Поэтому курс «Радиолокационная прокладка и наблюдение» входит обязательной составной частью в подготовку оператора САРП. Режим «Имитатор». В ряде САРП имеется режим моделирования нескольких ситуаций, в которых имитируются эхо-сигналы целей, движущихся по заданным траекториям. Этот режим используется как для контроля работоспособности САРП, так и для тренировки персонала.
Повышение информативности индикатора ситуации. Во многих САРП предприняты или предполагается принять ряд мер, направленных на повышение информативности индикатора ситуации.
Совмещение радиолокационной и навигационной информации. В некоторых САРП приняты меры к объединению всей навигационной информации на экране индикатора ситуации. В этом случае дополнительно к информации по расхождению судов оператор наблюдает на экране линию предварительной прокладки, ограничительные изобаты, символы приметных ориентиров на берегу. Вводится дополнительно сигнализация по навигационной безопасности движения судна, отклонениях от предварительной прокладки. Имеется возможность поручить вычислительному комплексу вывести судно на линию предварительной прокладки и удерживать на намеченном маршруте. Необходимая навигационная информация на переход вводится с магнитной кассеты или магнитного диска. Если плавание осуществляется вне радиолокационной видимости берегов, характер информации на экране сохраняется, но место судна-наблюдателя определяется по скомплексированным данным спутниковых, фазовых и других радионавигационных систем, данным астрономических обсерваций. Одновременно регистрирующее устройство виосиг необходимые данные о курсе, скорости, месте судна и обсервациях в судовой журнал. В перспективе возможна оперативная автоматическая корректура электронных карт по информации, получаемой от спутников связи.
для предупреждения столкновений судов Правило 5 «Наблюдение» требует не только постоянно вести надлежащее визуальное и слуховое наблюдение, но и использовать все имеющиеся средства, «применительно к преобладающим обстоятельствам, с тем, чтобы полностью оценить ситуацию и опасность столкновения». Одним из таких средств является УКВ-радиостанция. которая может помочь уточнить обстановку в районе плавания (например, наличие судов, занятых сложной буксировочной операцией, прокладкой кабеля и т. д.), уточнить намерения других судов (например, предстоящее сбавление хода и разворот для взятия лоцмана с подветренного борта), согласовать действия при расхождении. УКВ-станция можег быть использована как при плавании на виду друг у друга, так и при плавании в условиях ограниченной видимости. Особенно важным использование УКВ-связи может быть при плавании в/узкостях, где расхождения судов вынужденно происходят на малых дистанциях и в случае несогласованного маневрирования может не тватить времени и пространства для дополнительного маневра, компенсирующего неблагоприятный маневр цели. В некоторых случаях своевременное применение УКВ-связи может предотвратить возникновение сложной ситуации. Например, просьба к другому судну задержаться с отходом от причала может предотвратить необходимость расхождения с ней в узком бассейне или на входе в него. В некоторых районах использование УКВ-етанций для согласования действия при расхождении предусматривается правилами плавания. Так, например, в территориальных и внутренних водах США все суда должны постоянно нести слуховую вахту на 13-м международном канале УКВ-связи. При плавании по внутренним водным путям РСФСР все суда, оборудованные УКВ-радиостанциями, должны использовать их в случаях, требующих заблаговременного согласования взаимных действий, и держать их включенными во время движения, маневрирования и стоянки на якоре. При подходе к сложным районам плавания или следовании по ним в условиях ухудшения видимости надлежит периодически по УКВ-связи информировать другие суда о своем местонахождении и своих действиях. Однако, следует иметь в виду, что при использовании УКВ-связи для согласованного маневрирования при расхождении требуется особая осторожность, поскольку здесь судоводителя подстерегает целый ряд опасностей. Идентификация. Проблема надежного взаимного опознавания является наиболее важной и наиболее сложной при использовании УКВ станции для предупреждения столкновений. Согласовывая взаимные действия надо тщательно удостовериться с тем ли судном вы ведете переговоры. Неоднократны случаи столкновений, одной из важнейших причин которых было то, что расходились с одним судном, а переговоры о согласованном маневрировании вели совсем с другим судном. Для идентификации могут быть использованы следующие признаки цели: тип судна, позиция цели, ее курс и скорость. Следует отметить, что указание только типа судна без привязки к конкретной позиции может привести к неверному опознаванию, так как в зоне радиослышимости может быть несколько судов данного типа, хотя з пределах визуальной видимости наблюдается только одно такое судно. Позиция цели может быть указана: а) широтой и долготой (как правило, в открытом море); б) пеленгом и дистанцией от приметного берегового ориентира или средства навигационного оборудования (никогда не следует использовать пеленги и динстанции от своего судна); в) указанием буя, знака, плавмаяка, проходимого в данный момент целью (если необходимо, указать также в каком направлении). Учитывая, что процедура идентификации требует времени, ее сле_ дует производить заблаговременно, чтобы в дальнейшем не отвлекаться от оценки ситуации и принятия решений. Канал связи. В практике использования УКВ-радиостанции для предупреждения столкновений имеется случай, в котором попытки капитана судна договориться о совместном маневрировании были безуспешными, так как УКВ-радиостанция на его судне была нечаянно переключена на другой канал и это не было замечено. Неоднократные попытки капитана связаться по УКВ усугубили ситуацию, так как в результате было упущено время для принятия экстренных мер для избежания столкновения. Подобная ситуация может возникнуть на любом судне, если после сеанса связи на установленном в данном районе канале (отличном от шестнадцатого) трубка будет зафиксирована на штатном месте и произойдет автоматическое переключение на 16 канаал. Для избежания таких случаев вахтенный помощник должен контроливать установку канала по окончании каждого сеанса. Однозначность договоренности. В ряде случаев столкновения судов произошли несмотря на то, что идентификация была произведена верно и судоводители договорились (точнее, им показалось, что они договорились!) о согласованном маневрировании. На самом деле либо договоренность была недостаточно конкретна, либо судоводители друг друга не поняли или поняли неверно. Например, один сообщил, что он отворачивает влево, а другой понял, что предложено расхождение левыми бортами. Чаще всего такие случаи возникают при радиотелефонных переговорах между судами, принадлежащими разным странам, когда возникают языковые трудности общения. Предотвратить неодназначность договоренности помогает практика повтора принятых сообщений («понял, что вы собираетесь сделать то-то и то-то»), уверенное владение английским языком и использование, в случае возникновения трудностей, разработанного ИМО для] УКВ-связи между судами Стандартного морского навигационного словаря-разговорника. К сожалению, неконкретность или неоднозначность договоренности встречаются и тогда, когда нет языковых трудностей общения. 31 августа 1986 г. в Цемесской бухте произошло трагическое столкновение парохода «Адмирал Нахимов» и теплохода «Петр Васев». Перед этим оба судна договорились между собой по УКВ-связи, что «Петр Васев» пропустит пароход «Адмирал Нахимов», хотя и наблюдает его с левого борта, т. е., согласно МППСС-72, находится в положении судна, которому уступают дорогу. Неконкретность договоренности, отказ от обсуждения конкретных действий, которые будет предпринимать каждое судно, послужили одной из причин столкновения. МППСС-72 и УКВ. Международные правила предупреждения столкновений судов не допускают произвольного их изменения по взаимной договеренности судов. Регламентировать взаимоотношения судов при расхождении могут только МППСС-72 или местные правила, если они действуют в этом районе. В любом случае действия, предпринимаемые для предупреждения столкновений судов на основе радиотелефонной договеренности, не должны противоречить требованиям МППСС-72. Как же в таком случае относиться к договеренности «пропустить», как это было в случае «Петра Васева» и «Адмирала Нахимова»? Если такая договеренность была произведена заблаговременно, до того, как суда оказались связанными соответствующими правилами, следует считать, что одно из судов (в данном случае «Петр Васев») добровольно взяло на себя обязанность не затруднять движение другого судна, то есть следовать так, чтобы не возникала опасность столкновения. Однако, если суда сближаются так, что возникает опасность столкновения, то оба судна обязаны выполнять соответствующие правила плавания и маневрирования. Любые попытки договориться о расхождении не так, как это предписывают соответствующие правила плавания и маневрирования, предпринимаемые после того, как суда оказались связанными этими правилами, должны быть безусловно осуждены. Исключение составляют те случаи, когда особые‘ обстоятельства плавания вызывают необходимость отступления от Правил для избежания ^непосредственной опасности (Правило 2(6)). Особую важность приобретает надлежащее использование УКВ- связи при плавании в системе управления движением судов (УДС). Все суда на ходу или на якоре несут постоянную радиовахту на рабочем канале центра УДС. Судно, у которого выходит из строя УКВ-радиостанция, должно освободить рекомендованный курс или полосу движения, лечь в дрейф или встать на якорь и принять все меры к установлению связи с центром УДС. Центр принимает меры к опознанию судов, дает разрешение на вход их в зону действия системы УДС, указывает маршрут движения, скорость, указывает места постановки на якорь. Для опознания центр запрашивает позицию судна относительно приметных ориентиров или предлагает совершить определенный маневр. Центр УДС передает на судно по УКВ-связи указания и рекомендации. При радиолокационной проводке центр передает на судно информацию о боковом отклонении судна и рекомендации поста. Проводимое судно должно репетовать получаемую от поста информацию и сообщать ему о предпринимаемых действиях, которые, в общем случае, могут и не совпадать с рекомендациями поста. В отличие от рекомендаций указания оператора поста об очередности и маршруте, а также о действиях для предупреждения чрезмерного сближения обязательны для судов. При этом перечень возможных указаний четко оговаривается в местных правилах. Контрольные вопросы. U Что такое предсказанные зоны опасности и как они отображаются на САРП фирмы «Сперри»? 2. Как осуществляется оценка ситуации при использовании САРП с векторным представлением опасности? 3. Какие виды предупредительной сигнализации используются в САРП? 4. В чем заключается опасность чрезмерного доверия к САРП? 5. Какие направления дальнейшего совершенствования САРП? |