управление судном книга. На якоре 203 Штормовые диаграммы 184186 Штормовые условия в дрейфе
 Скачать 3.93 Mb. Скачать 3.93 Mb.
|

|
1п (опасные дели); б) во вторую очередь — цели, имеющие DKP<.Dm\n и *Кр>*пчп, т. е. цели, имеющие опасные ЛОД, но с большим промежутком времени до кратчайшего сближения; в) остальные цели в порядке возрастания дистанции до них.
Во всех случаях ограничения автозахвата на экране индикатора ситуации должны быть обозначены зоны, в которых автозахват не производится. На рис. 20.4 показан индикатор ситуации при использовании максимальной и минимальной дистанции автозахвата и линий запрета автозахвата. На рис. 20.5 показан индикатор ситуации с автоматическим сбросом целей в наименее опасном секторе зоны. В ряде САРП в режиме автозахвата так же, ка^к в режиме ручного захвата, при нахождении нескольких целей на одном пеленге очередная цель может быть захвачена только после обработки и выдачи данных о движении предыдущей захваченной цели, т. е. значительно позже ее появления. Различные конструкции САРП отличаются друг от друга алгоритмами обнаружения и захвата целей. Для грамотного и безопасного использования САРП судоводитель должен четко знать критерии обнаружения и автозахвата, заложенные в конкретную САРП, установленную на судне. Рис. 20.4. Использование линий запрета Рис. 20.5. Использование сектора автоавтозахвата матического сброса целей при переполнении каналов сопровождения Ограничения захвата. Судоводитель должен при использовании САРП учитывать как ограничения, свойственные РЛС, так и дополнительные ограничения, накладываемые САРП. Ограничения, накладываемые РЛС, следующие.
а) помехи от волн возникают вблизи центра развертки и могут быть уменьшены соответствующей установкой ВАРУ; следует помнить, что ВАРУ ослабляет не только помехи, но и полезные эхо-сиг- налы на малых расстояниях — при чрезмерном введении ВАРУ мертвая зона может существенно превышать конструктивную; б) помехи вследствие осадков могут быть уменьшены применением малой постоянной времени (МПВ) или переключением на диапазон 10 см; за полосой дождя вследствие рассеивания энергии излучения цели могут не обнаруживаться — в этом случае единственным разумным выходом будет снижение скорости судна; в) ложные эхо-сигналы могут возникать при нахождении крупного объекта на близком расстоянии (до 4—6 миль) вследствие приема отраженного сигнала боковым лепестком диаграммы направленности в горизонтальной плоскости, они располагаются по дуге, а на очень близких расстояниях — кольцом в той же дальности, что и объект; остаются неподвижными при маневре своего судна; г) ложные эхо-сигналы от крупных объектов могут возникать вследствие переизлучения близкими к антенне РЛС деталями своего судна (мачта, труба); они расположены по радиусу в направлении переизлучающего предмета, разворачиваются вместе с меткой курса; д) ложные эхо-сигналы могут возникать вследствие приема на данном периоде отражений от зондирующего импульса предыдущего периода (при сверхрефракции, образовании атмосферного волновода); ж) помехи могут возникать вследствие приема зондирующих импульсов других РЛС того же диапазона. Дополнительные ограничения, вносимые САРП, следующие.
Сопровождение неманеврирующей цели. Каждая сопровождаемая цель обозначается на экране индикатора ситуации символом сопровождаемой цели. В различных САРГ1 приняты различные символы: кружок, кораблик, две черточки у эхо сигнала и т. д. При каждом обороте антенны сравниваются координаты центра цели с координатами центра ее строба. Строб перемещается в позицию цели, уточняются составляющие вектора относительной скорости цели. В промежутке между поступлениями информации о положении цели строб перемещается с вычисленной ранее относительной скоростью цели, оказываясь к моменту облучения цели в предсказанной ее позиции. Чем увереннее сопровождается цель, тем меньше ее строб. В ряде САРП имеется возможность оператору вывести на экран индикацию строба и видеть изображение строба и динамику изменения его величины. Обычно это используется при захвате слабо различимых целей, чтобы убедиться в ее уверенном сопровождении. Нахождение цели внутри строба и уменьшение величины строба от развертки к развертке показывает, что цель сопровождается уверенно. Маневр цели. Вычисленные параметры относительного движения цели сопоставляются с предыдущими значениями этих параметров. Если расхождения превышают предельную случайную погрешность, фиксируется маневр цели. В этом случае может быть введена предупредительная сигнализация, например мерцание символа и вектора цели, включение светового табло «Маневр цели». Эта сигнализация может сопровождаться звуковой сигнализацией для привлечения внимания оператора. В частности, такая предупредительная сигнализация мо жет быть использована при стоянке судна на якоре. В этом случае маневр (начало движения) стоящего на якоре поблизости судна может свидетельствовать как о съемке этого судна с якоря, так и о появлении дрейфа на якоре у этого судна или у судна-наблюдателя. Обнаруживаемый САРП маневр неподвижного объекта (буя, маяка, скалы) также является следствием дрейфа или значительного разворота судна-наблюдателя. Потеря цели. Если на одной из разверток цель в пределах строба не обнаружена, то система сопровождения продолжает поиск в течение последующих 5 оборотов антенны. При этом строб цели перемещается с вычисленными ранее параметрами относительного движения, постепенно расширяясь с каждым обзором. Если в результате этого поиска цель не обнаружена, включается предупредительная сигнализация, а последнее наблюдавшееся положение цели отмечается на экране. При этом подается звуковой сигнал для привлечения внимания оператора, включается световое табло «Потеря цели», мерцающим символом отмечается последняя наблюдавшаяся позиция цели на экране индикатора. Потеря цели может произойти вследствие ослабления отраженного целью сигнала (удаление цели, изменение ее ракурса), входа цели в зону интенсивных помех, в радиолокационную тень другого объекта, в теневой сектор или за ложный дуговой эхо-сигнал, резкого маневра цели. В последнем случае в режиме автозахвата потерянная цель будет захвачена повторно как вновь появившаяся цель. Смена цели. При прохождении целей на близком расстоянии друг от друга, когда стробы целей частично перекрывают друг друга, может происходить смена цели — переход строба с менее сильного на более сильный эхо-сигнал. Смене целей может способствовать попадание одной цели в радиолокационную тень другой цели. После расхождения целей одна из них сопровождается двумя каналами сопровождения, а вторая не сопровождается. В режиме автозахвата вторая цель будет захвачена повторно как новая цель. Особенно опасна смена цели в режиме ручного захвата, так как в отличие от потери дели в этом случае предупредительная сигнализация не срабатывает (поскольку канал ее сопровождения продолжает быть занятым другой целью) и дальнейшее перемещение потерянной цели оказывается неконтролируемым. Особенно часто смена цели происходит при работе РЛС в 10-сантиметровом диапазоне, так как стробы целей в этом случае значительно больше, чем при работе в 3-сантиметровом диапазоне волн. Наблюдая близко проходящие друг от друга цели, особенно при работе в 10-сантиметровом диапазоне, оператор должен быть готов осуществить перезахваг цели в случае перехода вектора от одной цели к другой. Цель, сопровождаемая двумя каналами, будет иметь два вектора, один из которых будет ложным, так как в сглаживании участвуют параметры обеих целей и дополнительно учитывается смещение строба при смене цели как поправка к ее относительному движению. Оба вектора сольются только после полного периода сглаживания. На 10- сантиметровом диапазоне это произойдет значительно позже вследствие больших флуктуаций положения максимума эхо-сигнала, а при наличии двух и более максимумов цель будет долгое время иметь два отличающихся друг от друга вектора. В современных САРП при близком прохождении двух целей отключается алгоритм сглаживания, т. е. какое-то время курсы и скорости этих целей считаются неизменными, что предотвращает смену целей. Сброс цели. Йброс целей с сопровождения может осуществляться автоматически и вручную. Критерии автоматического сброса целей с сопровождения в различных САРП отличаются друг от друга. Как правило, автоматически сбрасываются с сопровождения следующие цели: цели, вышедшие за пределы диапазона сопровождения; удаляющиеся на кормовых курсовых углах в дистанции, более некоторой заданной. Для ручного сброса необходимо навести координатный маркер на цель и нажать кнопку «Сброс». Во многих САРП координатный мар- кер может быть наведен на цель также неоднократным нажатием кнопки «Формуляр». При каждом нажатии маркер перепрыгивает с цели на цель в порядке очередности их захвата. В режиме автоматического захвата цель также может быть сброшена с сопровождения вручную. Однако если цель наблюдается уверенно и не сопровождается другим каналом сопровождения, она будет повторно взята на сопровождение системой автозахвата.
Прогнозирование позиций судов в режиме ЛОД. Если САРП работает в режиме ЛОД, то у всех сопровождаемых целе^й высвечиваются на экране индикатора ЛОД за установленное оператором время прогноза. Увеличивая время прогноза, оператор удлиняет все ЛОД и, сопоставляя расстояния от своего судна до ЛОД (используя НКД), оценивает предполагаемую дистанцию расхождения DKP. Зная время прогноза, оценивает /Кр. Время прогноза может меняться оператором произвольно (с интервалом 1 мин) или принимать фиксированные значения (например, 15 мин и 30 мин) в зависимости от типа САРП. Время прогноза высвечивается на световом табло или непосредственно на экране индикатора. Если ЛОД двух целей одновременно прихо- 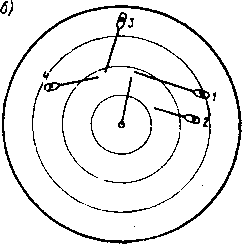 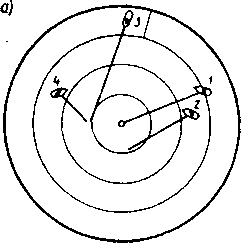 Рис. 20.6. Оценка опасности столкновения (шкала 8 миль, время прогноза 18 мин): а Рис. 20.6. Оценка опасности столкновения (шкала 8 миль, время прогноза 18 мин): а |