управление судном книга. На якоре 203 Штормовые диаграммы 184186 Штормовые условия в дрейфе
 Скачать 3.93 Mb. Скачать 3.93 Mb.
|

— в режиме индикации ЛОД; б в режиме индикации ЛИД20 кб, 16 мин; для судна 4 DK1,» 18 кб, /,ф«27 мин.обстановку, можно определить для судна 1 DKP»0, fKP«18 мин; для судна 2 Дфж18 кб, /,ф«15 мин; для судна 3 DKp Суда 3 и 4 сближаются опасно между собой. Как правило, во всех САРП режим ЛОД используется без смещения центра развертки. Однако есть САРП (очень немногочисленные), в которых центр смещается по линии курса своего судна. В этом случае надо быть осторожным, чтобы избежать возможной ошибки интерпретации, так как ЛОД не совпадают с хвостами послесвечения. В тех САРП, где символы имеют форму кораблика, а не окружности, можно в режиме ЛОД оценить и ракурсы целей. Режим ЛОД является наиболее удобным для оценки опасности сближения. Он позволяет наглядно и достаточно точно определить DKр непосредственно с экрана индикатора ситуации. Единственные погрешности при формировании векторов ЛОД — это погрешности системы сопровождения. Прогнозирование позиций судов в режиме ЛИД. В этом режиме все цели и свое судно имеют векторы ЛИД, показывающие, где будут все суда через время прогноза. Увеличивая время прогноза, оцениваем степень опасности столкновения. Из рис. 20.6,6 в ситуации, аналогичной рис. 20.6, д, видно, что опасность представляет судно /, с которым свое судно приходит одновременно через 18 мин в одну точку. Судно 2 не опасно, так как свое судно проходит по носу у него. Суда 3 и
В режиме ЛИД дистанция и время расхождения оцениваются более приближенно, чем в режиме ЛОД. Кроме того, по сравнению с векторами ЛОД при формировании векторов ЛИД дополнительно вносятся погрешности вследствие погрешностей курса и скорости своего судна, которые могут оказать существенное влияние на оценку степени опасности расхождения. Поэтому оценка степени опасности столкновения не должна основываться только на сведениях об истинном движении. Оценивая степень опасности по ЛИД, надо дополни тельно или переключить в режим ЛОД или использовать цифровую информацию о DKP и tKР. Поскольку, как правило, режим ЛИД используется в САРП без смещения центра развертки (т. е. высвечиваются векторы ЛИД, но эхо-сигналы и символы перемещаются по ЛОД), следует помнить, что продолжение послесвечеиия (если оно есть) представляет собой линию относительного движения, хотя и установлен режим ЛИД. Использование цифрового формуляра. Для определения DHp и /кр интересующей судоводителя цели необходимо вывести на индикацию ее формуляр. Для этого последовательным нажатием кнопки «Формуляр» или перемещением маркера (в зависимости от типа САРП) наводят координатный маркер на нужную цель, а на панели управления переключают формуляр в положение «Дистанция — Время» (если данные формуляра индицируются попарно). Значения DKp и tKP высвечиваются на экране индикатора или на специальном цифровом табло. Как правило, цифровой формуляр используется совместно с режимами ЛОД или ЛИД. С целью контроля, исключения промахов оператора (например, перепутывания ЛИД и ЛОД) целесообразно всегда при оценке опасности столкновения использовать два разных режима (обычно ЛИД или ЛОД и цифровой формуляр). Предупредительная сигнализация. В САРП предусмотрена оценка опасности столкновения путем сравнения DKP и /КР каждой цели с заданными оператором с пульта управления допустимыми значениями Dmin и *т!П. Цели, имеющие DKp<Dmi,i и tKP<.tmin, классифицируются, как опасные цели. Если до этого цель не имела признака опасной цели, она классифицируется, как новая опасная цель. По признаку новой опасной цели срабатывает следующая предупредительная сигнализация: мерцает или отмечается повышенной яркостью символ и вектор цели или дополнительно к символу сопровождения цель обозначается символом опасности, загорается светящаяся кнопка «Опасная цель», включается звуковая сигнализация. После того как оператор, посмотрев на экран индикатора и обнаружив новую опасную цель, нажмет кнопку «Опасная цель», звуковая сигнализация и подсветка кнопки отключаются и цель переводится из разряда «Новая опасная цель» в разряд «Опасная цель». Символ опасности или мерцание вектора цели на экране индикатора продолжают отмечать цель до тех пор, пока она не перестанет быть опасной. Если в процессе маневрирования эта цель перестанет быть опасной, а потом вновь станет опасной, она будет снова классифицироваться, как новая опасная цель. Задержки в оценке опасности столкновения. После захвата цели требуется определенное время для накопления информации о цели и вычисления относительных курса и скорости цели DKp и tKP. Поэтому первоначально у цели появляется символ сопровождения без вектора ЛОД или ЛИД. Согласно требованиям ИМО, не позднее чем через 1 мин вычисляются предварительные, имеющие большую погрешность значения /Со, V» и /)кр. Постепенно данные уточняются, и через 3 мин вычисленные значения Ко и V0 (для построения вектора ЛОД), Км и 1/ц (для построения вектора ЛИД) должны удовлетворять требованиям ИМО, предъявляемым к точности выдаваемой САРП информации. Таким образом, только через 3 мин после захвата цели судоводитель имеет возможность достоверно оценить степень опасности столкновения. Такое же время требуется на получение достоверной информации о DкР и /Кр после маневра своего судна или маневра цели. При маневре курсом или, особенно, скоростью, предпринятом своим судном или целью, ЛОД представляет собой криволинейную траекторию. Система сопровождения будет в этом случае давать некоторые осредненные за время сглаживания (около 1 мин 15 с) промежуточные значения относительного курса и относительной скорости, что внесет погрешность в вычисляемые значения /)кр и ^кр> Понадобится около 3 мин после окончания маневра, чтобы стабилизировать вычисляемые значения DKP и /кр. Маневр по расхождению должен выполняться заблаговременно с тем, чтобы с учетом задержек в получении информации от САРП проконтролировать эффективность предпринятых действий и в случае необходимости скорректировать их. Точность определения DKp и /кр. На точность определения £>кр и /Кр влияют погрешности в определении пеленга и дистанции до цели вследствие погрешностей РЛС и погрешностей алгоритма обработки информации на ЭВМ. Погрешности измерения пеленга возникают вследствие следующих причин: бортовой качки, флуктуации центра отражения цели, асимметричности диаграммы направленности антенны в горизонтальной плоскости, мертвого хода антенны, погрешностей гирокомпаса, азимутальной погрешности квантования. Погрешности измерения дистанции возникают вследствие бортовой качки судна, наклона переднего фронта эхо-сигнала, погрешности квантования. Наличие рассмотренных погрешностей приводит к погрешности в определении £>КР и *Кр. Эти погрешности будут зависеть от расстояния до цели, ее ракурса, курсового угла на цель, скорости относительного сближения. В технических требованиях ИМО к САРП приведены требования к точности САРП для четырех случаев взаимного расположения судов. Обобщая эти требования, можно сделать следующий вывод. При нахождении цели в D=8 миль и при времени до кратчайшего сближения *Кр«24 мин (т. е. для средних условий) САРП должны определять DKр с предельной погрешностью 1,3—2 мили через 1 мин после захвата цели и 0,5—0,7 мили через 3 мин. Меньшие значения соответствуют нулевому курсовому углу цели и нулевому ее ракурсу (встречное судно). Большие значения соответствуют курсовому углу 45е и ракурсу цели 90° (сходящиеся курсы своего судна и цели). Приведенные величины показывают, что несмотря на высокую точность обработки данных на ЭВМ, вследствие погрешностей датчиков, в первую очередь погрешностей радиолокационного оборудования, погрешности в определении DKP достигают значительных величин. Чрезмерное доверие к выдаваемым САРП данным, расхождение с судами по данным САРП на очень малых расстояниях может привести к опасности столкновения.
Получение информации об элементах движения цели. Элементы движения цели могут быть приближенно определены глазомерно с экрана индикатора ситуации, работающего в режиме ЛИД. Курс цели определяется по направлению ЛИД, а скорость примерно сопоставлением длины вектора цели с длиной вектора свого судна. На индикаторе ситуации, использующем в качестве символов ориентированные по Кц кораблики, оценка ракурса цели может быть произведена и в режиме ЛОД. В случае необходимости данные о курсе и скорости цели могут быть запрошены в цифровой форме вызовом на индикацию формуляра этой цели и переключением его в положение «Курс — Скорость» (если данные формуляра индицируются попарно). Запрос цифровых данных о курсе и скорости цели может быть применен, например, когда ожидается маневр цели с тем, чтобы его зафиксировать раньше (определить сторону изменения курса цели). Обнаружение маневра цели. Маневр цели может быть обнаружен в процессе систематического наблюдения за ЛИД или ЛОД цели или выведенными на формуляр цифровыми данными о £>кр, *кр или /Сц, Vu. Следует иметь в виду, что изменение направления ЛОД цели не всегда свидетельствует об изменении ее курса, направление ЛОД меняется и при изменении скорости цели. Для обнаружения маневра цели могут использоваться также хранящиеся в памяти ЭВМ данные о предыдущих позициях цели. К стандартным САРП предъявляется требование по запросу воспроизвести на экране по крайней мере 4 предшествующих позиции любой цели, сопровождаемой не менее 8 мин. Временной интервал между этими позициями должен быть одинаковым. Предшествующие позиции можно показать как в режиме ЛИД, так и в режиме ЛОД. Важно помнить, что предыдущее поведение цели может некоторым образом указать на ее намерения. Так, если цель совершила маневр для расхождения с другой целью, можно предположить, что в ближайшем будущем она может возвратиться к прежним элементам движения. В некоторых САРП имеется возможность использовать предупредительную сигнализацию, включающуюся при резком изменении элементов движения цели. В этом случае на экране мерцает вектор маневрирующей цели (символ в отличие от опасной цели не мерцает) и загорается кнопка «Маневр цели». Точность определения элементов движения цели. Дополнительно к погрешностям, рассмотренным в п. 20.5, на точность расчета курса и скорости цели влияют погрешности датчиков курса и скорости своего судна. Значительные случайные погрешности в определение курса и скорости цели вносит существенное несовпадение курса и скорости перемещения антенны РЛС с курсом и скоростью судна за период 1 оборота антенны. При частоте вращения антенны 16 об/мин период по- ступлниея информации о цели составит 3,75 с. За это время судно, имеющее скорость 16 уз, пройдет около 30 м. Вследствие бортовой качки с 0=10° антенна РЛС может сместиться перпендикулярно курсу до 5 м. Примерно такое же поперечное смещение антенны возникает вследствие рыскания судна при расположении антенны в кормовой части судна. Вследствие этого фактическое перемещение антенны РЛС может существенно отличаться от перемещения центра тяжести судна. При расчете /Сц и Vn к вектору относительной скорости цели (по отношению к антенне РЛС) прибавляется вектор скорости центра тяжести судна, а надо бы прибавлять вектор скорости антенны (который неизвестен). Возникающие вследствие этого существенные погрешности сглаживаются в ЭВМ специальным алгоритмом, принимающим в учет 18—20 последовательно полученных значений Кц и Vn. Вследствие этого погрешности сглаженного значения /Сц и Vtt становятся существенно меньше, но все равно достигают 3—7° для курса и 0,8—1,2 уз для скорости цели. Оценка ситуации с использованием ЛИД менее достоверна, чем при использовании ЛОД или цифрового формуляра 0Кр И ^кр* Течение й0 J 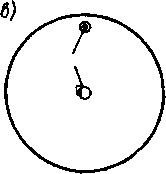 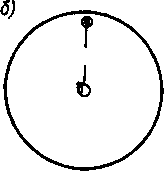 |