управление судном книга. На якоре 203 Штормовые диаграммы 184186 Штормовые условия в дрейфе
 Скачать 3.93 Mb. Скачать 3.93 Mb.
|

0,5(Va-\-Vm). (19.2) | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Время от начала маневра до кратчайшего сближения при инерционных характеристиках t0, мин | Средняя скорость в до* лях от начальной ^Cp/VH при маневрах Ун1/Ун | |||||||||||
| 4 | 5 | 6 | 7 1 | 8 | 9 | 10 | 12 | | 1 и | 0,75 | 0,5 | | | 0,25 | 0 |
| | | | | | | 6 | 7 | 8 | 0,9 | 0,9 | 0,8 | 0,8 |
| | — | 6 | 7 | 8 | 9 | 10 | 12 | 14 | 0,9 | 0,8 | 0,7 | 0,7 |
| 6 | 8 | 10 | И | 13 | 14 | 16 | 19 | 22 | 0,85 | 0,75 | 0,65 | 0,6 |
| 10 | 12 | 14 | 17 | 19 | 22 | 24 | 29 | 33 | 0,8 | 0,7 | 0,6 | 0,5 |
| 14 | 18 | 22 | 25 | 29 | 32 | 36 | 43 | — | 0,8 | 0,65 | 0,5 | 0,4 |
| 22 | 28 | 34 | 39 | — | — | — | | — | 0,8 | 0,6 | 0,4 | 0,3 |
| 38 | 48 | | | | | | | | 0,8 | 0,6 | 0,4 | 0,2 |
Примечания: IVU — скорость судиа-наблюдателя до маневра; У щ—скорость судна-наблюдателя после маневра; VCp— средняя (эквивалентная) скорость от начала маневра до момента кратчайшего сближения; tv — инерционная характеристика судна, численно равная времени падения скорости до величины 0,5 И* при маневре на «Стоп» (зависит от водоизмещения судна, начальной скорости и внешних условий).
Пример 2. Найти среднюю скорость судна за время от начала маневра ППХ — МПХ (Vhi=0,5Vh) До кратчайшего сближения, если /Мр&г20мин; /d«4mhh, а УПпхв
16 уз.
Решение. В табл. 19.1 в колонке tv=4 находим ближайшее к заданному /кр=»22 мин и в соответствующей строке для маневра 0,5 цолучаем УСр/Ун*=0,6. Среднюю скорость можно отложить в треугольнике скоростей глазомерным выделением 0,6 отрезка Уи или при необходимости перевести в узлы УСр = 0,6-16=9,6 уз.
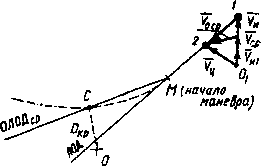
Пример 3. По результатам радиолокационной прокладки получили, что для расхождения с целью в А|«д необходимо иметь УСр«0,5Уи. По ОЛОДср и V0 Ср определили время от начала маневра до кратчайшего сближения /Кр»20 мин. Инерционная характеристика судна 8 мин. Какой маневр скоростью необходимо предпринять для расхождения на £>3ад?
Решение. В табл. 19.1 в колонке /« = 8 находим ближайшее к заданному /Кр=*19 мин и в соответствующей строке ищем ближайшее меньшее значение Уср. В данном случае. УСр*=0,5кл находит в колонке «0». Для расхождения с целью в Ьэад необходимо, дать «Стоп». При маневре на «Стоп» есть возможность оценить фактическую скорость Vt судна к моменту расхождения, так как (Уср/Ун)2.
В нашем случае VtJVa**0,5*«0,25, т. е. фактически к моменту расхождения скорость судна будет 0,25VB.
Использование индикатора истинного движения и приставок к РЛС
Оптический (зеркальный) планшет представляет собой антипарал- лаксное устройство, устанавливаемое над экраном индикатора РЛС и позволяющее вести прокладку без отрыва от радиолокационного наблюдения. Зеркальный планшет позволяет вести прокладку большого количества целей с меньшим интервалом времени ме^сду точками. Недостатками зеркального планшета являются необходимость начинать прокладку заново при переключении шкалы и несколько меньшая точность построений. Решение всех задач на зеркальном планшете совершенно аналогично прокладке на радиолокационном планшете. Для построения вектора VH полезно иметь прозрачную линейку с нанесенными длинами векторов для нескольких шкал.
Режим истинного движения позволяет наглядно представить фактическое перемещение целей, что дает возможность в узкостях соотносить это перемещение с навигационной обстановкой и прогнозировать дальнейшее движение целей. Еще одним достоинством истинного
Рис. 19.20. Влияние маневра цели на угол разворота ЛОД
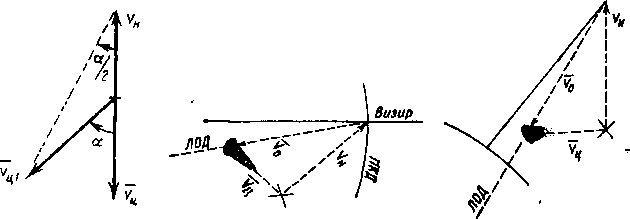
Рис. 19.28. Использование приставки «Альфа» («Ольха»)
Рис. 19.27. Анализ ситуации расхождения с одной целью на индикаторе истинного движения
движения является возможность более раннего обнаружения изменения курса встречного судна. Как видно из рис. 19.26, при примерно равных скоростях судов изменение курса встречного судна на угол а приводит к изменению направления ЛОД только на а/2. Поэтому в режиме истинного движения поворот встречного судна замечается быстрее, чем в режиме относительного движения. В то же время режим истинного движения имеет ряд недостатков, существенно ограничивающих возможность его применения (без дополнительных приставок) для решения задач расхождения судов. В первую очередь, это отсутствие ЛОД и трудность оценки степени опасности сближения. Во-вторых, это плохая различимость маневра скоростью судов-целей.
В режиме истинного движения имеется возможность получить полную информацию по расхождению с одной целью без ведения прокладки на маневренном планшете. Для этого, отметив позицию цели на зеркальном планшете, выставляют на цель перекрестье визира и ПКД и в дальнейшем положение визира и ПКД не меняют. Спустя некоторое время перекрестье сместится вместе с началом развертки в направлении курса судна-наблюдателя, а эхо-сигнал сместится в направлении курса цели. Эти перемещения пропорциональны скоростям судов, поэтому в любой момент времени перекрестье и эхо-сигнал совпадают с вершинами треугольника скоростей, а линия, проведенная через эти точки, показывает относительное движение цели. На рис. 19.27 пунктиром показаны линии, достраиваемые мысленно на экране для получения полной информации. Косым крестиком отмечена первоначальная позиция эхо-сигнала в момент наведения на него перекрестья. Используя этот способ, следует внимательно следить за неизменностью элементов движения цели и в случае маневра цели вновь навести на нее перекрестье визира и ПКД (или конец визира изменяемой длины).
Приставка «Альфа» («Ольха») позволяет с помощью специальных маркеров зафиксировать относительные позиции пяти целей. Наибольший эффект применение приставки дает в сочетании с режимом истинного движения и зеркальным планшетом. В этом случае внешний конец каждого маркера выполняет ту же роль, что и перекрестье визира и ПКД в предыдущем случае. На рис. 19.28 пунктиром показаны линии, достраиваемые мысленно для одной из пяти целей. Поперечная перекладина маркера позволяет оценить дистанцию кратчайшего сблн-
жения — ЛОД, касательная к ней, проходит *в двух милях. В данном случае (см. рис. 19.28) кратчайшая дистанция составляет I милю (справа), цель пройдет по корме судна-наблюдателя.
Современные зарубежные РЛС дают возможность вести полуавтоматическую прокладку до 10 целей непосредственно на экране черно- белого или цветного дисплея. Позиции целей вводятся вручную, фиксация времени и прокладка по этим данным осуществляется автоматически.
Особенности использования РЛС при плавании в системах разделения движения
Ориентация в потоке. При плавании в системе разделения движе- ния судов наличие большого количества целей создает необходимость глазомерной ориентации по экрану РЛС, а упорядоченность движения судов облегчает эту ориентацию. Следует использовать достаточно крупномасштабную шкалу, чтобы были заметны следы послесвечения. Удобно использовать сдвиг начала развертки с тем, чтобы на крупномасштабной шкале увеличить дистанцию обзора по носу судна-наблюдателя. Навыки в построении треугольников скоростей у следов послесвечения позволяют классифицировать все цели: суда нашего потока, суда встречного потока, пересекающие поток справа и слева, входящие в наш поток и выходящие из него, входящие во встречный поток и выходящие из него. Оценивая положение центра развертки относительно целей своего потока, следует убедиться, что наше судно не самое левое в своем поюке, т. е. оно не находится в районе линии или зоны разделении движения. Наличие следов послесвечения у целей своего потока говорит о том, что скорость судна-наблюдателя не равна скорости судов в полосе движения и, если есть возможность, следует привести ее в соответствие со средней скоростью потока.
I