управление судном книга. На якоре 203 Штормовые диаграммы 184186 Штормовые условия в дрейфе
 Скачать 3.93 Mb. Скачать 3.93 Mb.
|

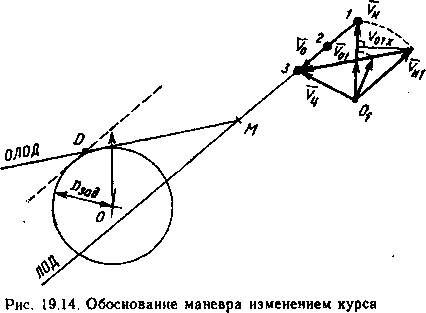
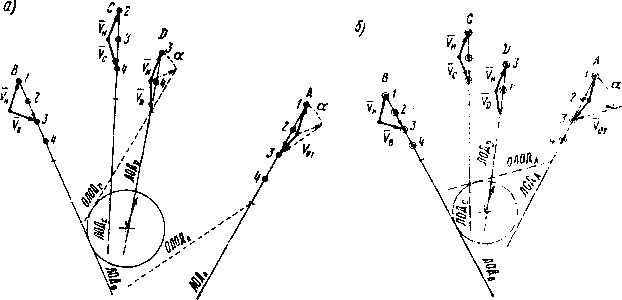
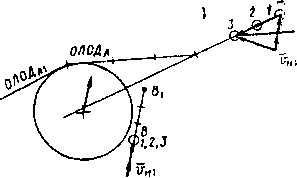
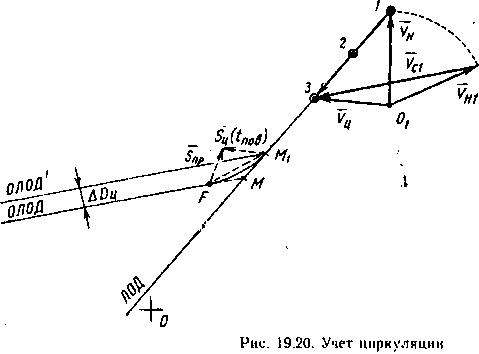
9= 180°±22,5° (вторая пограничная ситуация), сторона изменения курса Правилами не определена, однако большинство специалистов в этом случае рекомендуют изменение курса влево.на ЛОД по предполагаемому времени маневра или по предполагаемой дистанции маневра наносится точка М местоположения цели в момент начала маневра расхождения; мысленным разворотом вектора VH или изменением его длины в соответствии с выбранным видом маневра определяют сторону разворота ЛОД при этом маневре; из точки М проводят по касательной к Озгл ОЛОД; при этом из двух возможных касательных к Z)3aд проводится та, которая соответствует стороне разворота ЛОД при выбранном виде маневра; через конец вектора Гц параллельно ОЛОД в направлении, противоположном направлению ОЛОД, проводится линия вектора новой относительной скорости; если выбран маневр изменением курса, то новое направление вектора скорости судна-наблюдателя VH\ находят разворотом вектора Гн вокруг точки Oi до пересечения с линией вектора новой относительной скорости; угол между векторами VH\ и Vн определит требуемый угол отворота; если выбран маневр скоростью, то новый вектор скорости судна- наблюдателя равен отрезку вектора от точки 0{ до линии новой относительной скорости; если выбран комбинированный маневр курсом и скоростью, то для нахождения нового курса судна-наблюдателя вокруг точки Oi разворачивается уменьшенный в соответствии с предполагаемым сбавлени- ем скорости вектор судна-наблюдателя. Возвращение к прежним элементам движения. С выбором и осуществлением маневра процесс расхождения не заканчивается. Судоводитель должен тщательно контролировать эффективность предпринятого маневра. Если последующая радиолокационная прокладка показала, что Окр<£>заД, следует исходя из обстоятельств данного случая предпринять дополнительный маневр, а если необходимо предотвратить столкновения или иметь больше времени для оценки ситуации, то в соответствии с Правилом 8(e)—уменьшить ход или остановиться, застопорив машины или дав задний ход. Если последующая радиолокационная прокладка показала, что в результате предпринятого маневра судна-наблюдателя (или маневра судна-наблюдателя и маневра цели) DKp^D3aay судоводитель должен оценить возможность возвращения своего судна к прежним элементам движения. Для этого рекомендуется провести касательную к заданной дистанции расхождения, параллельную ЛОД до предпринятого маневра (на рис. 19.14 эта линия показана пунктиром). После пересечения целью этой линии судно-наблюдатель может вернуться к прежним элементам движения, не сближаясь при этом с целью ближе £>эад. После возвращения к прежним элементам движения радиолокационную прокладку ведут до тех пор, пока другое* судно не будет окончательно пройдено и оставлено позади. Учет навигационных ограничений. При плавании в узкости маневр, который выбирают и обосновывают для расхождения, должен одновременно и в равной степени обеспечивать и навигационную безопасность судна-наблюдателя. С этой целью при обосновании маневра следует: исходя из навигационной обстановки знать безопасную дистанцию отхода от линии пути судна Sfie.w, опустив перпендикуляр из конца вектора Гщ на вектор Гп, определить скорость отхода от линии пути УОТх, т. е. расстояние, иа которое смещается свое судно в сторону от линии пути каждые 6 мин в процессе расхождения с целью (см. рис. 19.14); определить время расхождения по V0\ и расстоянию АШ; определить дистанцию отхода Soтх = Уотх^рас*; если 50тх>5безоп, то предполагаемый маневр опасен в навигационном отношении и следует выбрать маневр с меньшей скоростью отхода (например, комбинированный маневр). Учет маневра цели. Выбирая маневр по расхождению с другим судном, конечно, никогда нельзя быть уверенным, что это судно само не предпримет какого-либо маневра, а будет следовать постонным курсом и постоянной скоростью. Поэтому, выбрав маневр в предположении постоянства элементов движения цели, после его выполнения необходимо тщательно наблюдать за эхо-сигналом этого судна до тех пор, пока суда не разойдутся. Неблагоприятный маневр цели приводит к уменьшению расстояния кратчайшиего сближения, а в некоторых случаях может свести на нет предпринятые нами действия. Поэтому судоводитель должен уметь при решении задачи учитывать влияние маневра другого судна на изменение обстоятельства встречи. Если в процессе расхождения могут быть сделаны предположения о возможном маневре цели, то этот предполагаемый маневр может быть учтен при выборе маневра судна-наблюдателя. В этом слу* чае новый векторный треугольник скоростей строится у измененного вектора скорости цели Ущ. 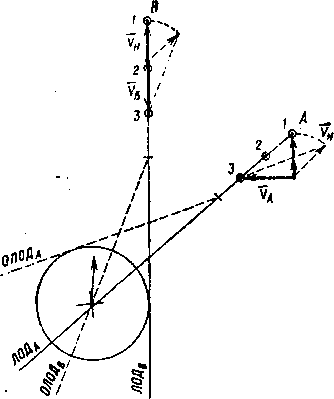 Рис. 19.15. Влияние потенциально опасного судна на выбор маневра Маневр расхождения с несколькими судами. Если на экране индикатора наблюдаются эхо-сигна-лы нескольких судов, то при выборе маневра для расхождения с наиболее опасным судном необходимо принимать во внимание суда, ситуация сближения с которыми может ухудшаться в результате маневра. Например, оценивая обстоятельства встречи с двумя судами (рпс. 19.15), видим, что разойтись с опасным судном А можно как отворотом вправо, так и уменьшением скорости. Однако, разворачивая вправо вектор Vu в треугольнике скоростей судна В, убеждаемся, что при нашем повороте вправо судно В становится опасным (показано пунктиром). В данном случае, по-видимому, целесообразнее выбрать маневр уменьшением скорости, который ведет к расхождению с судном А и не ухудшает ситуацию сближения с судном В. При достаточном навыке дополнительные графические построения в тре- Нанести первые позиции судов и построить векторы скорости судна-наблюдателя в масштабе 1 : 10 (векторы движения за 6 мин). Навести вторые (если позволяет обстановка, то и третьи) позиции судов (удобнее через интервалы времени, кратные 3 мин); нанести экстраполированные (или интерполированные) точки на 6 мин; построить векторы целей. Проанализировать ситуацию сближения, выбрать вид маневра (поворот вправо, влево, изменение скорости), а также суда, наиболее опасные при данном маневре. Уточнить маневр (на сколько градусов поворачивать, какой дать ход); построить новые векторные треугольники и ожидаемые линии относительного движения. Выполнить маневр. Проконтролировать эффективность маневра. Учет инерции судна Способ относительного промежуточного курса. Из графической прокладки находят требуемый угол изменения курса. Из таблицы ма* невренных элементов по углу отворота находят время, затрачиваемое судном на поворот /ман, угол промежуточного курса и промежуточ- Способ условной упрежденной точки. ОЛОД проводится не из точки М\ местоположения судна-цели в момент начала маневра, а из условной упрежденной точки М, отнесенной по ЛОД вперед на время упреждения /упр. В первом приближении в качестве tуи» принимают половину времени поворота. Таким образом, при этом способе учета циркуляции поворот судна-наблюдателя начинается на {упр«0,5/Маи раньше, чем цель придет в точку, из которой проведена ОЛОД. Способ введения поправки в Ьзал. Как показывают расчеты, при изменении* курса судна-наблюдателя на угол до 90° погрешности в DKp вследствие инерционности поворота не превышают тактического радиуса циркуляции, при больших углах поворота достигают диаметра циркуляции. В этом способе /)3.,л назначается с запасом на максимально возможную погрешность от неучета циркуляции. Этот способ является основным при повороте под корму потенциально опасного судна, идущего параллельным или почти параллельным курсом. Способ построения кривой ОЛОД. Относительная траектория перемещения судна может быть найдена построением путевых треугольников за последовательные интервалы времени t„ после маневра S„(fi)=Su(/i)— SH(ti). г 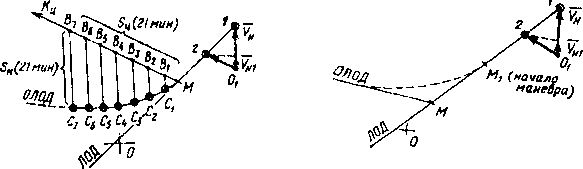 Рис 19/21. Учет инерции построением кривой ОЛОД Рис. 19.22. Учет инерции способом условной упрежденной точки ЛОД и определить Окр как кратчайшее расстояние от центра планшета до кривой. Способ точный и наглядный, но трудоемкий. Этим способом можно решить только задачи предсказания DKP по выбранному маневру, но не решается задача по нахождению требуемого изменения скорости для расхождения в заданной дистанции. Для решения задач в условиях мостика этот способ не применяют. Он используется при разборе аварий, а также в качестве эталонного для оценки точности приближенных способов учета инерции.
При этом способе учета инерции условно считается, что в течение /уПр сохраняется прежняя скорость судна-наблюдателя, VH (при этом завышается пройденный путь), а после мгновенно устанавливается новая скорость V»\ (при этом пройденный путь занижаете^). Как видно из рис. 19.23, оптимальным будет такое время упреждения, при котором завышение пройденного пути за время /у„р компенсируется последующим занижением. Это соответствует равенству заштрихованных^ площадей на рис. 19.23. На рис. 19.24 приведена информация по выбору оптимального времени упреждения в зависимости от выбранного маневра (Vm/V* — = 0—Стоп, Vmi/V'm-= 0,5 — МПХ и т. д.) и характеристики инерционности /,. На основании этой информации в начале рейса может быть составлена рабочая таблица времени упреждения. 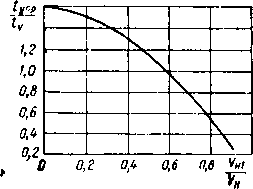 Рис. 19.24. Оптимальное время упреждения в зависимости от маневра и характеристики инерционности Учитываемое иэккнение 'скорости Фактическое изменение скорости Рис. 19.23. Принцип выбора времени упреждения 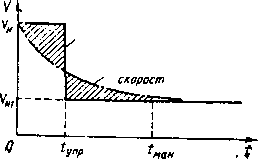 Пример 1. Судно имеет инерционную характеристику = 4 мин и имеет следующую градацию скоростей ППХ-14 уз, СПХ-10 уз, МПХ-8 уз, СМПХ-5 уз. Составить рабочую таблицу времени упреждения. Пример 1. Судно имеет инерционную характеристику = 4 мин и имеет следующую градацию скоростей ППХ-14 уз, СПХ-10 уз, МПХ-8 уз, СМПХ-5 уз. Составить рабочую таблицу времени упреждения. Решение. ППХ-СПХ. Ущ/Ун — Ю: 14=*0,71. Из графика на рис. 19.24 fynp/f»*** = 0,8; ^упр — О^*4*3,2л?3 мин. Рассчитав аналогично для VWУн**0,57; 0,3; 0 получим время упреждения (мин) для маневров сбавления скорости с полного хода Маневр СПХ МПХ СМПХ, Стоп |