*кр — ■
и ТКр — Т% \- *кр-
VH
Для определения обстоятельств встречи и элементов движения другого судна достаточно двух наблюдений. Однако чтобы исключить промахи в наблюдениях и убедиться в неизменности элементов движения другого судна в период наблюдений, рекомендуется увеличивать число наблюдений. Нахождение трех последовательно нанесенных через одинаковый интервал времени местоположений цели (А Лг, Л3) на одной прямой и равенство расстояний А\А2
АъАъ свидетельствуют как об отсутствии промахов в наблюдениях, так п о неизменности элементов движения цели в период от Т, до Г3.
К достоинствам способа истинной прокладки следует отнести его наглядность. Недостатком является относительная трудоемкость графических построений, необходимых для определения основных обстоятельств встречи: дистанции кратчайшего сближения и времени до него.
Относительная прокладка. Эта прокладка получила широкое распространение, так как этим способом более быстро и легко находятся ответы на главные вопросы: на каком кратчайшем расстоянии разойдутся суда и через какое время. При относительной прокладке определяют обстоятельства встречи и элементы движения цели в подвижной системе координат, начало которой принимают в месте нахождения судна-наблюдателя. Это соответствует действительной картине, которую наблюдает судоводитель на экране индикатора относительного движения. '
Из точки О, принимаемой за место своего судна, прокладывают наблюдаемые пеленги П1 и Пг и по ним расстояния D\ и D2 (рис. 19.2). Через полученные точки Ах и Л2 проводят ЛОД. Длина перпендикуляра ОС, опущенного из точки О на линию относительного движения, представляет собой в выбранном масштабе дистанцию кратчайшего сближения ОкР. Время сближения на кратчайшее расстояние:
'
и Ткр =я 7Vb /кр-
Vo
«нр =
При относительной прокладке также быстро определяется и расстояние, на котором цель пересечет курс нашего судна. Для этого достаточно измерить расстояние ОП. (Если ЛОД проходит у нас по носу, определяют точку пересечения целью нашего курса, а если ЛОД проходит у нас по корме — точку пересечения нашим судном курса цели, для чего из центра планшета проводят линию, параллельную до пересечения с ЛОД.) Время пересечения Г„ср определится путем прибавления к показаниям судовых часов на момент нахождения местоположения эхо-сигнала в точке Л2 промежутка времени /ПеР:
А,П
tneр— и Тпер Т*2 fnep • у о
Необходимо напомнить, что в первую очередь судоводитель должен определить основные обстоятельства встречи, т. е. DKp и fKp, а затем уже определять элементы движения цели.
Истинное перемещение цели является суммой двух_перемещений — относительного 50(Р0) и судна-наблюдателя 5Н(РН): £ц = £о+8Н или Vц = ^о“Ь Рн- _ ^
Учитывая коммутативность суммы векторов (So+Sh = Sh+<>o), можно находить 5Ц (Гц) двумя способами.
Построение векторного треугольника (см. рис. 19.2), показанное сплошными линиями, называется прямым. При нем начала векторов скоростей (линий путей), проложенных в сторону движения судов, находятся в одной точке.
Применяется иногда также обратное построение, при котором векторы, откладываемые в сторону движения судов, сходятся своими концами в общую точку (показаны пунктиром).
В дальнейшем мы будем в основном пользоваться прямым построением, так как оно более удобно при решении задач расхождения.
Длина вектора движения судна-наблюдателя должна быть равна в выбранном масштабе плаванию своего судна за время между наблюдениями, принятыми для построения векторного треугольника. Длина полученного вектора движения цели соответствует плаванию цели за время между наблюдениями.
Относительная прокладка выполняется на радиолокационном маневренном планшете, представляющем собой сетку полярных координат. Для ускорения расчетов, связанных с плаванием судна за время между наблюдениями, на маневренном планшете помещена логарифмическая шкала. На практике для ускорения прокладки используют следующие приемы, исключающие необходимость использования логарифмической шкалы.
Независимо от интервала времени между наблюдениями векторный треугольник строят за промежуток времени б мин. В этом случае длина каждого вектора составляет */ю соответствующей скорости.
Экстраполированные позиции цели находят откладыванием по ЛОД расстояния между двумя известными ее позициями.
Сразу после получения первого положения цели в ее точку направляют вектор в масштабе 1:10. После получения второго положения цели находят экстраполяцией ее положение через 6 мин после первого наблюдения (если ЫФ6 мин) и из начала вектора Г„ в эту точку проводят вектор Рц.
*Кр и ^ер рассчитывают, откладывая по ЛОД отрезки, равные Vo. и деля глазомерно отрезок, включающий точку кратчайшего сближения или точку пересечения курса.
/
Рис. 19.3. Построения на маневренном планшете по двум позициям цели, полученные с интервалом 3 мин
Рис. 19.4. Влияние погрешностей в позиции цели на радиолокационную прокладку
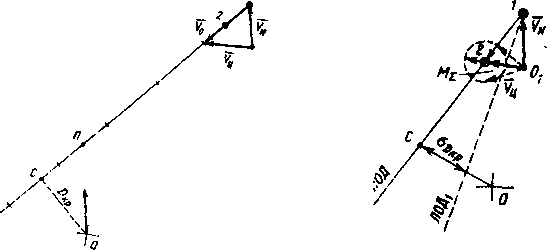
На рис. 19.3 показаны построения по двум позициям цели, полученным с интервалом 3 мин.При проведении ЛОД через две точки цели возможны ошибки в оценке ситуации, связанные с промахом в нанесении одной из позиций или маневром цели в промежутке между наблюдениями. Для исключения этих ошибок следует по возможности .иметь для первоначальной оценки ситуации три позиции каждой цели.Точность определения обстоятельств встречи и элементов движения судов. При обработке радиолокационных наблюдений следует иметь в виду, что обстоятельства встречи, курс и скорость цели определяются с погрешностями, которые в ряде случаев могут быть весьма значительными. Особенно важно учитывать вероятную погрешность в DKp при оценке опасности столкновения.Проведенные исследования показали, что при работе на шкалах среднего масштаба (15—16 миль) вследствие погрешности измерения пеленгов и дистанций относительное положение цели находится со средней квадратической погрешностью М«0,6 кб. Если суммарную погрешность в двух относительных позициях цели отнести (точки / и 2 на рис. 19.4) ко второму моменту наблюдения, можно считать, что второе относительное положение определено с суммарной погрешностью М £ «0,85 кб.Погрешность в определении позиции цели в первую очередь приводит к погрешности определения DKV (см. рис. 19.4):(19.1)Значения средней квадратической погрешности определения DKР в зависимости от и промежутка времени между наблюдениями Д/н приведены на графике (рис. 19.5).С вероятностью р=0,95 предполагаемая дистанция расхождения судов лежит в пределах DKp=rt2ar кр. Погрешности в определении DКр весьма существенны и должны обязательно учитываться при оценке опасности сближения.Как видно из рис. 19.4, вследствие погрешности в определении позиции цели возникают погрешности в определении tKР, /Сц и Уц.
Рис. 19.5. Средняя квадратическая Рис. 19.6. Средняя квадратическая по-
погрешность дистанции кратчайшего грешность определения курса цели
сближения £>кр /Си
Погрешность в определении tKр зависит от отношения *Кр/Д*н и относительной скорости цели. Для встречных целей ot «0,5ч-1,0 мин,
|
 Скачать 3.93 Mb.
Скачать 3.93 Mb.