управление судном книга. На якоре 203 Штормовые диаграммы 184186 Штормовые условия в дрейфе
 Скачать 3.93 Mb. Скачать 3.93 Mb.
|

|
Глава 2. СВЕДЕНИЯ ОБ УПРАВЛЯЕМОСТИ 2.1. Устойчивость на курсе и поворотливость 120 2.2.Движение судна под влиянием переложенного руля 124 2.3.Влияние параметров корпуса и руля на управляемость 127 2.4.Влияние боковых сил, обусловленных работой гребного винта 128 2.S. Управляемость одновинтового судна на заднем ходу 132 2.6.Управление многовинтовым судном 133 Глава 3. ИНЕРЦИОННО-ТОРМОЗНЫЕ ХАРАКТЕРИСТИКИ СУДНА 3.1. Общие сведения об инерционно-тормозных свойствах судна 134 3.2.Движение при изменениях режиме работы двигателя на переднем ходу 138 3.3. Торможение судна 32 (з!9> 35 (1+1/ГГТ)(,. у ,/7П) 36 7- _о,5, 40 4.2.Ветровой дрейф 41 ,; = 2(«° -45° + 1807ц„). (4.24) 46 4.3.Маневрирование в условиях ветра 46 Глаша 5. МАНЕВРЕННЫЕ ЭЛЕМЕНТЫ СУДНА И ИХ ОПРЕДЕЛЕНИЕ 5.1. Судовая информация о маневренных элементах 51 5.2.Определение маневренных элементов из натурных испытаний 52 5.3.Расчетное и экспериментально-расчетное определение элементов поворотливости 62 г. 64 6.1.Средства активного управлении (САУ) 73 6.3.Использование якорей при маневрировании 78 л 89 JjL Р т 104 7.4.Управление судами при буксировке 114 Глава 8. СНЯТИЕ СУДНА С МЕЛИ 8.1. Причины посадки судов на мель 118 8.2.Действия экипаже судна, севшего на мель 120 /п,(1 !-*.?,) 150 Q = ^cp F, (9.14) 157 ч 168 V -$г+‘ • 210 лгг 237 t©^'=0^>^00==£Э— 268 Неверные действия судна, которому уступают дорогу: Глава 2. СВЕДЕНИЯ ОБ УПРАВЛЯЕМОСТИ 2.1. Устойчивость на курсе и поворотливость 120 2.2.Движение судна под влиянием переложенного руля 124 2.3.Влияние параметров корпуса и руля на управляемость 127 2.4.Влияние боковых сил, обусловленных работой гребного винта 128 2.S. Управляемость одновинтового судна на заднем ходу 132 2.6.Управление многовинтовым судном 133 Глава 3. ИНЕРЦИОННО-ТОРМОЗНЫЕ ХАРАКТЕРИСТИКИ СУДНА 3.1. Общие сведения об инерционно-тормозных свойствах судна 134 3.2.Движение при изменениях режиме работы двигателя на переднем ходу 138 3.3. Торможение судна 32 (з!9> 35 (1+1/ГГТ)(,. у ,/7П) 36 7- _о,5, 40 4.2.Ветровой дрейф 41 ,; = 2(«° -45° + 1807ц„). (4.24) 46 4.3.Маневрирование в условиях ветра 46 Глаша 5. МАНЕВРЕННЫЕ ЭЛЕМЕНТЫ СУДНА И ИХ ОПРЕДЕЛЕНИЕ 5.1. Судовая информация о маневренных элементах 51 5.2.Определение маневренных элементов из натурных испытаний 52 5.3.Расчетное и экспериментально-расчетное определение элементов поворотливости 62 г. 64 6.1.Средства активного управлении (САУ) 73 6.3.Использование якорей при маневрировании 78 л 89 JjL Р т 104 7.4.Управление судами при буксировке 114 Глава 8. СНЯТИЕ СУДНА С МЕЛИ 8.1. Причины посадки судов на мель 118 8.2.Действия экипаже судна, севшего на мель 120 /п,(1 !-*.?,) 150 Q = ^cp F, (9.14) 157 ч 168 V -$г+‘ • 210 лгг 237 t©^'=0^>^00==£Э— 268 и приведенных выше основных причинах столкновении на вид: друг у друга сумма превышает 100%. так как при столкновении, ка правило, одновременно бывает нарушено несколько Правил. На вер^ ятность столкновения в условиях хорошей видимости существенна влияет время суток. Количество столкновений в темное время суток примерно в 3 раза больше, чем в светлое время.
Надлежащее наблюдение на судне составляет основу безопасности мореплавания. Как видно из приведенных выше данных, именно; отсутствие надлежащего наблюдения стало главной причиной каждого, второго столкновения, произошедшего в условиях хорошей видимости. В соответствии с требованиями Правила 5—«Наблюдение», «Каждое судно должно постоянно вести надлежащее визуальное и слуховое наблюдение, так же как и наблюдение с помощью всех имеющихся средств, применительно к преобладающим обстоятельствам и условиям, с тем, чтобы полностью оценить ситуацию и опасность столкновения». Рекомендации по организации надлежащего наблюдения приведены в Резолюции ИМО А.285 «Рекомендации ИМО по несению штурманской ходовой вахты», а также в руководящем документе Минмор- флота, РД.31.60.23-81 «Инструкция для помощников капитана, несущих ходовую вахту и вахту в порту». Для обеспечения качественного непрерывного наблюдения необходимо следующее.
Пол техническими средствами, имеющимися в распоряжении наблюдателя, понимают бинокли, РЛС, а также УКВ-станцию для получения информации от БРЛС или других судов. В настоящее время РЛС перестала быть средством, используемым только при ограниченной видимости. Имеется целый ряд прецедентов, когда суд обвинял в нарушении Правила 5 — «Наблюдение» капитана, не использовавшего РЛС в условиях хорошей видимости при сложной навигационной обстановке. Необходимость использования радиолокационного оборудования применительно к обстоятельствам и условиям плавания определена не только Правилом 5, но и вытекает из Правила 2(a), предостерегающего «...от пренебрежения какой-либо предосторожностью, соблюдение которой требуется обычной морской практикой...», а также из 'Правила 7 (а): «Каждое судно должно использовать все имеющиеся средства в соответствии с преобладающими обстоятельствами и условиями для определения наличия опасности столкновения...». В первую очередь необходимость использовать РЛС в хорошую видимость возникает ночью при большом скоплении судов или наличии фона береговых огней, т. е. в тех случаях, когда визуальная ориентировка затруднена. Наблюдение с помощью РЛС необходимо также при плавании ночью в районах, где имеются сооружения, которые не всегда освещены должным образом (буровые платформы и другие сооружения). В то же время использование РЛС не заменяет визуального и слухового наблюдения. Имеются судебные решения, обвиняющие капитана, который вел наблюдение только по РЛС, в пренебрежении визуальным и слуховым наблюдением. Визуальное и радиолокационное наблюдение дополняют друг друга, позволяют компенсировать недостатки, свойственные каждому виду наблюдений в отдельности. Основными достоинствами визуального наблюдения являются наглядность обстановки, быстрое обнаружение изменения курса наблюдаемым судном, высокая точность измерения пеленгов. К недостаткам относятся малая точность глазомерного определения дистанций до судов, очень приближенная оценка предполагаемой дистанции кратчайшего сближения, плохое обнаружение изменений скорости другими судами, сложность оценки последствий маневра своего судна по отношению к нескольким судам одновременно. Погрешность визуальной оценки дистанции до другого судна существенно зависит от личных качеств и натренированности наблюдателя, прозрачности атмосферы, размеров судов, наличия фона посторонних предметов и огней. При оценке расстояния можно ориентироваться на размеры судов. Однако надежность этого способа зависит от правильного опознавания силуэта судна, так как в ряде случаев малые и большие суда могут иметь похожие силуэты. Судоводитель должен постоянно тренировать свою профессиональную наблюдательность, при каждой встрече с судами в море пытатьсй определить тип и размер судна по его силуэту, при дальнейшем сближении проверить себя, таким образом приобретая навыки в глазомерной оценке размеров судов. •Л" Рис. 18.2. Столкновение теплохода «Петрозаводск» с судном «Jemrix»: С — точка столкновения Рис. 18.1. Измерение расстояний с помощью бинокля с сеткой тысячных дистанций В тех случаях, когда на судне имеется бинокль с сеткой тысячных дистанций, знание размеров приближающегося судна позволяет со сравнительно высокой точностью определять расстояние до него. Например, обнаруженный на носовых курсовых углах коьтейнеровоз шириной 25 м занимает по горизонтали 2 деления шкалы бинокля, при чем его мачты видны детворе (рис. 18.1). Так как каждое деление составляет пять тысячных дистанции, то расстояние до встречного судна 25-1000 S= х == 1250 м«6,7 кб. (>' I I * Иногда для оценки дистанции до другого судна используют различаемое^ деталей этого судна, так как при всем разнообразии размеров судов определенные их детали имеют примерно одинаковые размеры. Например, детали надстройки, якорный шар, антенна РЛС различаются невооруженным глазом на расстоянии 3—4 мили, а в бинокль на расстоянии около 5 миль. В тех случаях, когда включена РЛС, рекомендуется сочетать визуальное определение расстояний до судов с последующей проверкой измерением дистанции по РЛС. Это позволяет судоводителю приобретать навыки и знать свои погрешности глазомерной оценки расстояний. ♦ I При ведении наблюдения следует обязательно иметь в виду, что находящиеся в непосредственной близости суда создают затененные секторы как для визуального наблюдения (особенно ночью), так и для радиолокационного. Это особенно опасно, если ближайшее судно длительное время находится на постоянном пеленге. 2 мая 1984 г. теплоход «Петрозаводск» столкнулся в проливе Па-де-Кале с судном «Jemrix» (рис. 18.2). В течение всего времени сближения из-за суди а-сателлита А, находившегося по пеленгу 331° в дистанции б кб, огни судна «Jemrix», приближавшегося на постоян* Рис. 18.3. ном пеленге 331°, не были видны. Более того, «Jemrix» не наблюдался Опасная си- на экране «Петрозаводска», так как за судном А возник теневой сек- туация при тор. В результате «Jemrix» был обнаружен только в непосредственной обгоне на близости после того, как он на очень малой дистанции прошел по малом рас- носу находившегся слева от «Петрозаводска» судна А и столкновение стоянии предотвратить уже не удалось. Очень опасная ситуация может возникнуть при обгоне судна на малом расстоянии (рис. 18.3). В данной ситуации судно А, выходя на обгон судна Б в непосредственной близости от него, не видит встречного судна В, заслоненного обгоняемым судном. В тех случаях, когда плавание судна происходит в узкости, требующей постоянного контроля навигационной безопасности, ходовая вахта усиливается с тем, чтобы и в этих условиях было обеспечено непрерывное квалифицированное наблюдение. Своевременное обнаружение другого судна или его неблагоприятного маневра — половина успеха дальнейшего расхождения.
Обнаружив другое судно, следует определить наличие опасности столкновения, используя для этого все имеющиеся средства в соответствии с преобладающими обстоятельствами и условиями. Основным показателем наличия опасности столкновения при визуальном наблюдении является постоянство пеленга на судно при уменьшении расстояния до него. Поэтому, если, судя по ракурсу наблюдаемого судна, имеются основания предполагать возможность опасного сближения, необходимо произвести измерение серии пеленгов на это судно через некоторый интервал времени. Если пеленг судна заметно изменяется на нос (т. е. уменьшается у судна, находящегося справа, и увеличивается у судна, находящегося слева от курса своего судна), то это судно пройдет у нас по носу. Пеленг судна, проходящего по корме, будет изменяться в корму. Если пеленг не изменяется или заметно не изменяется, то существует опасность столкновения. Следует подчеркнуть, что при оценке опасности столкновения сравниваются пеленги, а не курсовые углы, которые могут изменяться вследствие изменения курса своим судном или его рыскания. Для избежания ошибок рекомендуется пеленговать одну и ту же приметную часть другого судна. Если осуществляется расхождение на близком расстоянии с большим судном, то надо убедиться, что пеленги обеих оконечностей этого судна изменяются в одну и ту же сторону. Оценивать опасность столкновения следует по той оконечности, пеленг на которую изменяется медленнее (если пеленг меняется в корму — пеленговать носовую оконечность, а если в нос — пеленговать корму). Так же поступают при расхождении с буксирным караваном: убеждаются, что пеленги буксирующего и последнего из буксируемых судов изменяются в одном направлении и оценивают опасность по тому из этих пеленгов, который изменяется медленнее. Надо иметь в виду, что одно и то же изменение пеленга за единицу времени в зависимости от расстояния до цели и относительной скорости сближения показывает различную дистанцию расхождения и, как следствие, соответствует разной степени опасности сближения. В табл. 18.1 показано, например, какой может быть предполагаемая дистанция расхождения судов при изменении пеленга цели на 1° за 1 мин. При другой величине изменения пеленга за 1 мин дистанция расхождения увеличивается или уменьшается пропорционально изменению пеленга. Более точно предполагаемая дистанция расхождения судов (дистанция кратчайшего сближения) определяется из радиолокационной прокладки или глазомерно с экрана РЛС. Таблица 18.1. Предполагаема* дистанция расхождения судов при изменении пеленга на 1° в ! мни, кб Относительная скорость, уэ Дистанция между судами, кб 10 20 30 40 16 37 18 12 9 4 2 67 33 22 16 8 52 34 26 5 4 Даже значительное изменение пеленга и большая предполагаема дистанция расхождения судов говорят об отсутствии опасности столк* новения только при неизменности курсов и скоростей обоих судов. Любое изменение курса и (или) скорости одним из судов изменяет ситу*< ацию сближения, а некоторые изменения могут превратить ее в опас-т ную. Изменение курса другим судном при надлежащем наблюдение может быть обнаружено практически сразу по изменению ракурса я взаимного расположения ходовых огней или по услышанному звуко-; вому сигналу маневроуказания. Изменение скорости другим судном визуально практически не обнаруживается, а сигналы маневроуказания для маневров скоростью, кроме работы машины на задний ход, не установлены. Поэтому контроль за изменением пеленга должен произ-/ водиться в течение всего расхождения до тех пор, пока другое судно не будет окончательно пройдено и оставлено позади.
Когда суда находятся на виду друг у друга, судоводители для предупреждения столкновения руководствуются правилами раздела I «Плавание судов при любых условиях видимости» (Правила 4—10) и правилами раздела II «Плавание судов, .находящихся на виду друг v друга» (Правила 11 — 18) части В «Правила плавания и маневрирования», а также Правилом 34 «Сигналы маневроуказания и предупреждения» и Правилом 36 «Сигналы для привлечения внимания» МППСС-72. В соответствии с Правилами все суда должны: следовать безопасной скоростью (Правило 6) ; вести надлежащее наблюдение (Правило 5); используя все средства, определять наличие опасности столкновения (Правило 7); предпринимая действия для предупреждения столкновения, удовлетворять требованиям, предъявляемым к таким действиям (Правило 8); маневрируя, как это разрешается или требуется Правилами, подавать сигналы маневроуказания и предупреждения (Правило 34). В основе правил плавания и маневрирования лежит принцип разделения обязанностей между двумя опасно сближающимися судами. За исключением сближения судов с механическими двигателями на встречных курсах, некоторых особенностей плавания в узкостях и по системам разделения движения, взаимные обязанности двух опасно сближающихся судов распределяются следующим образом: а) одно судно, уступающее дорогу, должно в соответствии с Правилом 16 предпринять заблаговременное и решительное действие с тем, чтобы чисто разойтись с другим судном; согласно требованиям Правила 8, это действие должно быть уверенным, своевременным, достаточно большим, чтобы оно могло быть легко обнаруженным и не должно приводить к опасному сближению с другими судами; б) другое судно, которому уступают дорогу (рис. 18.4), должно сохранять курс и скорость; может предпринять действие, чтобы избежать столкновения только собственным маневром, если для него становится очевидным, что судно, обязанное уступить дорогу, не предпринимает соответствующего действия (при этом оно, если позволяют обстоятельства, не должно поворачйвать влево, если уступающее дорогу судно находится слева от него); должно предпринять такое действие, которое наилучшим образом поможет предотвратить столкновение, когда обнаруживает, что оно находится настолько близко, что столкновение нельзя избежать только действиями судна, уступающего дорогу. Судно, которому уступают дорогу, предпринимая разрешенный или предписанный Правилом 17 маневр, должно учитывать, что уступающее дорогу судно может в любой момент сманеврировать. Поэтому предпочтительны такие маневры, которые либо не противоречили бы возможному маневру уступающего дорогу судна, либо были настолько значительны, чтобы перекрыть даже его неблагоприятный маневр. Таким образом, если для каждой ситуации определить, какое из двух судов должно уступить дорогу, то обязанности каждого из судов будут четко обозначены и вероятность несогласованных действий становится минимальной. 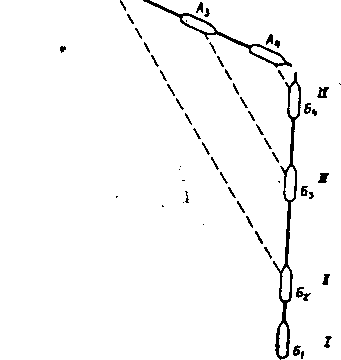 Обгон. В первую очередь уступающее дорогу судно определено для ситуации обгона — обгоняющее судно должно сторониться пути обгоняемого (Правило 13). Судно считается обгоняющим другое судно, когда оно подходит к нему с направления более 22,5° позади тра- Обгон. В первую очередь уступающее дорогу судно определено для ситуации обгона — обгоняющее судно должно сторониться пути обгоняемого (Правило 13). Судно считается обгоняющим другое судно, когда оно подходит к нему с направления более 22,5° позади тра-Рис. 18.4. Последовательное изменение обязанностей судна £, которому уступают дорогу: 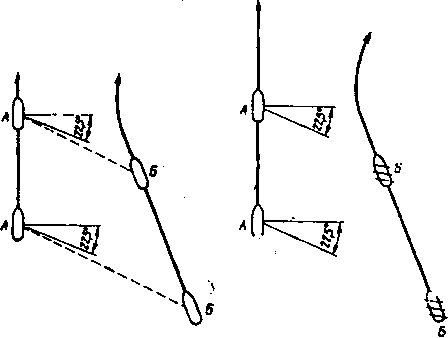 Рис. 18.5. Ситуация обгона, когда судно Б уступает дорогу судну А 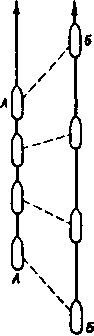 Рис. 18.7. Изменение во взаимном положении су* дов не снимает с судна Б обязанности держаться в стороне от пути обгоняемого судна А Рис. 18.6. Ситуация обгона парусным судном судна с механическим двигателем / — суда находятся на большой дистанции, опасности столкновения нет, оба судиа свободны в своих действиях; // — возникает опасность столкновения, судно Б должно сохранять курс и скорость; /// —■ становится очевидным, что обязанное уступить дорогу судно А не предпринимает соответствующего действия; судно Б может предпринять действия, чтобы избежать столкновения только собственным маневром; оно должно подать звуковой* сигнал в соответствии с Правилом 34; /V — суда находятся настолько близко, что столкновения нельзя избежать только действием судна А, судно Б должно предпринять такие действия, которые наилуч- шим образом помогают предотвратить столкновение верза. В ситуации, показанной на рис. 18.5, судно Б должно уступить дорогу судну А. Правило 13 «Обгон» обладает приоритетом по отношению к остальным правилам плавания и маневрирования. Оно действует независимо от предписаний других правил разделов I и II части В. Какие бы ни были взаимные обязанности судов, обгоняющее судно всегда уступает дорогу обгоняемому. В ситуации на рис. 18.6 парусное судно Б, в любой другой ситуации пользующееся преимуществом прохода, должно уступить дорогу обгоняемому судну с механическим двигателем А. Если имеются сомнения, является ли судно обгоняющим, то следует считать, что это именно так, и действовать соответствующе. Требование к обгоняющему судну уступить дорогу не связывается с возникновением опасности столкновения. Даже если пеленг заметно изменяется и опасности столкновения нет (рис. 18.7), обгоняющее судно Б должно уступить дорогу судну А. Никакое последовавшее изменение во взаимном положении судов не снимает с него этой обязанности. В ситуации, показанной на рис. 18.7, судно Б не вправе поворачивать влево до тех пор, пока судно А «не будет окончательно пройдено и оставлено позади», т. е. до тех пор, пока этот поворот может создавать препятствия безопасному движению судна А. Некоторыми специалистами высказывается мнение, что требования Правила 17 не распространяются на обгоняемое судно. Это мнение основывается на том, что в официальном русском переводе не говорится, что обгоняющее судно «уступает дорогу». Правило 13 «Обгон» требует от обгоняющего судна «держаться в стороне от пути обгоняемого судна», а Правило 17 относится к судну, «которому уступают дорогу». Однако история развития Правила 13 и сопоставление с английским оригиналом не подтверждают этого мнения. Правило 13 сохранило практически неизменными требования Правила 24 ППС£-6Й, в котб ром содержится требование «уступить дорогу». В английском оригинале Правила 13 употребляется то же выражение «shall keep out of the way», что и в остальных правилах плавания и маневрирования, которое во всех остальных Правилах переведено как «должно уступить дорогу». Исходя из этого действия обгоняемого судна должны определяться положениями Правила 17 и, следовательно, ему надлежит сохранять в ситуации обгона свои курс и скорость, чтобы не затруднять действия обгоняющего судна. В то# же время, если обгоняемое судно подходит к изгибу фарватера, новому рекомендованному курсу, то обгоняющее судно в соответствии с обычной морской практикой и обстоятельствами данного случая не должно препятствовать повороту обгоняемого судна. В этом случае в соответствии с Правилом 2(6) поворот обгоняемого судна следует рассматривать как вынужденное и оправданное отступление ог Правила 17(a) (i). Взаимные обязанности судов. Правило 18 следующим образом распределяет все суда по категориям в порядке ухудшения их маневренных возможностей: 1) судно с механическим двигателем; 2) парусное судно; 3) судно, занятое ловом рыбы; 4) судно, ограниченное в возможности маневрировать, и судно, лишенное возможности управляться. Если между собой встречаются суда разных категорий, то судно, имеющее по этой градации лучшие маневренные возможности, должно уступить дорогу. При этом, как и п Правиле 13, опасность столкновения не является обязательным условием действия Правила 18. Парусные суда. Распределение обязанностей между двумя опасно сближающимися парусными судами производится в зависимости or галса и курса относительно ветра. В ситуации на рис. 18.8 судно А, идущее левым галсом, должно уступить дорогу судну Б, идущему правым галсом. В ситуации на рис. 18.9 оба судна идут одним галсом (в данном случае — правым). Находящееся на ветре судно А должно уступить дорогу судну Б, находящемуся под ветром. Суда с механическими двигателями. В общем случае (за исключением обгона), если возникает опасность столкновения между двумя судами на ходу, то судно, которое наблюдает другое судно на своей правой стороне, должно уступить дорогу. При этом оно должно, если позволяют обстоятельства, избегать пересечения курса другого судна у него по носу. В ситуации на рис. 18.10 судно А уступает дорогу и действует в соответствии с Правилами 15, 16, 8, а судно Б — в соот- 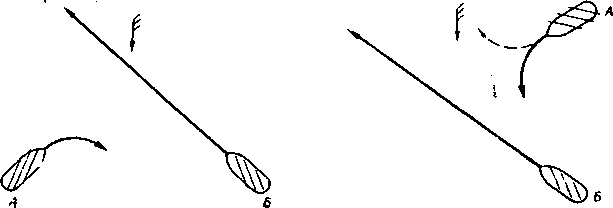 Рие. 18.8. Расхождение парусных сулоя, идущих разными галсами Рис. 18.9. Расхождение парусных су дов, идущих одинаковыми галсами ветствии с Правилом 17. Если судно Б будет предпринимать маневр,5 который оно может делать в соответствии с Правилом 17 (а) (и), то* этот маневр должен отвечать требованиям Правил 8 и 17(c). Пра-^ вило 15 действует независимо от того, имеет ли судно с механическим, двигателем А ход относительно воды или нет. При сближении противоположными или почти противоположными курсами (рис. 18.11) каждое судно должно изменить свой курс вправо с тем, чтобы каждое судно прошло у другого по левому борту. В данной ситуации нет судна, уступающего дорогу, и соответственно! нет судна, которое в течение какого-то времени было обязано сохранять курс и скорость. Пограничные ситуации. Во всех случаях, когда возможна двойственная трактовка ситуации, по смыслу Правил и в соответствии с хорошей морской практикой («считай себя ближе к опасности*) следует считать существующей такую ситуацию, которая требует активных действий своего судна. В ситуации на рис. 18.12, пограничной между ситуацией пересечения курсов и ситуацией противоположных курсов, судно Б, сомневаясь в трактовке ситуации, должно считать существующей ситуацию сближения почти противоположными курсами и действовать соответственно. В данном случае при выполнении Правил любая трактовка не приведет к обострению ситуации. Более опасна пограничная ситуация на рис. 18.13 между ситуацией пересечения курсов и обгоном. Для того чтобы ситуация разрешилась безопасно, необходимо, чтобы судно Б в случае сомнения считало существующей ситуацию обгона, а судно А в случае сомнения — ситуацию пересечения курсов. Наиболее опасный случай сближения судов на встречных курсах возникает, когда суда расходятся первоначально в малой дистанции правыми бортами (рис. 18.14). Каждое из судов в зависимости от субъективной оценки степени опасности такой дистанции может либо не предпринимать действий, либо изменить свой курс вправо. И то и другое решение не противоречит Правилу 14. Если судоводитель считает дистанцию расхождения небезопасной, наиболее приемлемым действием является заблаговременный и решительный поворот вправо i \ Рис. 18.11. Расхождение судов с механическими двигателями на противоположных курсах ь Рис. 18.10. Расхождение судов с механическими двигателями на пересекающихся курсах 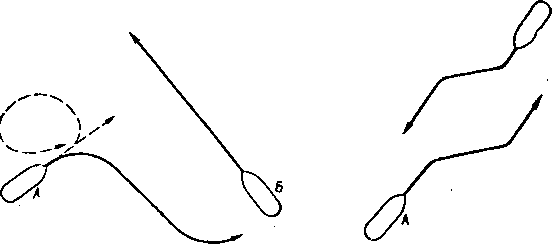 Рис. 18.12. Возможные действия при двойственной трактовке ситуации (Правила 14 и 15): Рис. 18.13. Возможные действия при двойственной трактовке ситуации (Правила 13 и 15): .4,—судно А считает существующей ситуацию пересечения курсов и, уступая дорогу, сбавило ход; Аг — судно Л считает существующей ситуацию обгона и сохраняет курс и скорость; Б, — судно Б считает существующей ситуацию пересечения курсов и сохраняет курс и скорость; Б* — судно Б считает существующей ситуацию обгона и отворачивает вправо, чтобы держаться в стороне от пути otfr< на; вариант А/Б, — ОПАСЕН! Л, —судно А считает курсы противоположными и отворачивает вправо; At — судно А считает курсы пересекающимися и. уступая дорогу, отворачивает вправо; Б, — судно Б считает курсы противоположными и отворачивает вправо; Ьг — судно Б считает курсы пересекающимися и сохраняет курс и скорость вает гоняемого суд- 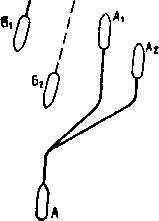 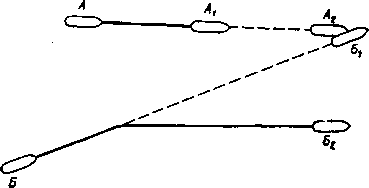 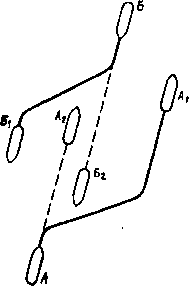 Рис. 18.14. Возможные действия при двойственной трактовке ситуации (Правило 14): 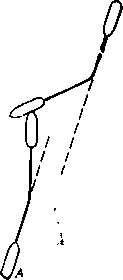 Рис. 18.15. Опасный вариант действий: Судно Б считает первоначальную дистанцию расхождения опасной и в соответствии с Правилом 14 изменяет курс вправо; судно А считает первоначальную дистанцию расхождения опасной и для ее увеличения в нарушение Правила 14 изменяет курс влево А\, Б, — суда А и Б считают первоначальную дистанцию расхождения опасной и изменяют свои курсы вправо; /1* и Б2 — суда А и Б считают, что опасности столкновения нет, и не предпринимают никаких действий 'в Рис. 18.16. Расхождение судов Л, Б и В Рис. 18.17. Судно Б не должно затруднять движение судна А о 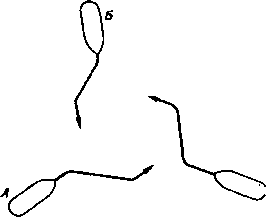 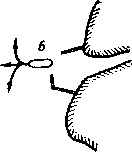 с тем, чтобы у другого судна не оставалось сомнений в оценке ситуации встречным судном и чтобы маневр не был принят за случайное рыскание на курсе. Наиболее опасным действием в этом случае, являющимся прямым нарушением Правил и неоднократно приводившим к столкновениям, является поворот одного из судов влево с целью увеличения дистанции расхождения правыми бортами (рис*. 18.15). Такой маневр судна А в случае поворота судна Б вправо компенсирует его действия и может привести к столкновению. При опасном сближении друг с другом нескольких судов возникают противоречия между обязанностями по отношению к различным судам. Так, в ситуации на рис. 18.16 каждое из судов является уступающим дорогу для судна справа и одновременно судном, которому уступают дорогу, для находящегося слева. Отступая на основании Правила 2(b) от одной из своих обязанностей, каждое судно в этом случае должно маневрировать, например, изменить курс вправо. Особенности расхождения в узкостях и системах разделения движения. Плавание в узкостях и по системам разделения движения не освобождает суда от выполнения соответствующих Правил плавания и маневрирования, но вносит некоторые особенности во взаимные обязанности судов. Это в первую очередь касается расхождения с судном, которое, согласно Правилу 9 (Ь, с, d) или Правилу 10 (/, /)> «пе должно затруднять движением К этой категории судов относятся: суда менее 20 м, парусные суда и суд?, занятые ловом рыбы, по отношению к судам, идущим по фарватеру или в полосе движения; любые суда, пересекающие узкий проход или фарватер, по отношению к судну, которое может следовать только в пределах такого прохода или фарватера. Взаимные обязанности судов в этом случае можно рассмотреть на примере ситуации, показанной на рис. 18.17. Судно А может следовать только в пределах фарватера. Судно Б не должно затруднять его движение и должно предпринять заблаговременные действия с тем, чтобы оставить достаточное водное пространство для безопасного прохода судна А. Если судно А испытывает сомнения в отношении намерений судна Б, оно может подать сигнал, предписанный Правилом 34 (d)% не менее пяти коротких и частых звуков свистком. Однако если возникает опасность столкновения, то в соответствии с Правилом 15 судно А должно уступить дорогу, предприняв своевременный и решительный маневр (Правила 16 и 8). В данных условиях это будет, как правило, резкое сбавление хода. При этом судно £> не освобождается от обязанности не затруднять движение судна А и должно, предпринимая свои действия, учитывать возможные действия судна А. В узком проходе или на фарватере обгон зачастую может быть совершен только при условии, что обгоняемое судно предпримет действия, позволяющие безопасный проход. В этом случае обгоняющее судно должно указать свои намерения, подав соответствующий звуковой сигнал (два продолжительных и один короткий или два продолжительных и два коротких). Обгоняемое судно в ответ подает сигнал ЧАРЛИ и предпринимает действия, способствующие обгону, либо подает серию не менее пяти коротких звуков, выражая сомнения в возможности безопасного обгона. Если при плавании в узкостях или по системам разделения движения обгоняемым является судно длиной менее 20 м или парусное судно или судно, занятое ловом рыбы, которое в общем случае согласно Правилам 9 и 10 не должно затруднять движение другого судна, то для ситуации обгона указанное требование не действует и в соответствии с Правилом 13 обгоняющее судно должно держаться в стороне от пути этих судов, т. е. уступать им дорогу. Обгон должен выполняться при условии его безопасности, а если это необходимо, то судно, желающее совершить обгон, должно согласно Правилу 9(e) запросить содействия у обгоняемого судна. Особенностью расхождения в узкостях и в системах разделения движения являются более частые, чем в открытом море, маневры изменением скорости. Это связано как с навигационными ограничениями, так и с ограничениями, налагаемыми Правилом 10(c): «...если судно вынуждено пересекать полосу движения, оно должно делать это, насколько возможно, курсом, перпендикулярным общему направлению движения потока». Обычная морская практика предъявляет в этих условиях повышенные требования к готовности машин к маневру и к своевременности маневра, так как маневры изменением скорости требуют больше времени на их выполнение и обычно медленнее изменяют ситуацию, чем маневры изменением курса. Контрольные вопросы. 1. От каких факторов зависит статистически вероятность столкновений судов на виду друг у друга? 2. Как определить, развивается ли ситуация чрезмерного сближения и существует ли опасность столкновения? 3. Какие разделы правил плавания и маневрирования МППСС-72 действуют при плавании судов на виду друг у друга? 4. Каковы взаимные обязанности судов при расхождении в различных типовых ситуациях? 5. Какие особенности имеет расхождение судов в узкости? Глава 19. РАСХОЖДЕНИЕ СУДОВ В УСЛОВИЯХ ОГРАНИЧЕННОЙ ВИДИМОСТИ х 19.1. Статистика столкновений Почти две трети (68,4 %) столкновений судов мирового морского флота приходятся на условия ограниченной видимости. Эти столкновения следующим образом распределяются (%) в зависимости от курсового угла (градусы) сближения: Курсовые углы Частота столкновения |