управление судном книга. На якоре 203 Штормовые диаграммы 184186 Штормовые условия в дрейфе
 Скачать 3.93 Mb. Скачать 3.93 Mb.
|

|
кр при обгоне а*кр «2ч-3 мин. Погрешность в определении курса цели зависит от ДtH и скорос ти цели. Чем меньше скорость цели, тем больше погрешность в определении ее курса (рис. 19.6). Погрешность в определении скорости цели также зависит от At„ (рис. 19.7). Следует иметь в виду, что фактические погрешности в определении /Сц и Уц будут больше вследствие погрешностей в курсе и скорости судна-наблюдателя. Определение маневра наблюдаемого судна. Если судно-иаблюда- гель и наблюдаемое судно не изменяют своих элементов движения, то нанесенные на маневренный планшет через одинаковые промежутки времени относительные позиции наблюдаемого судна будут ложиться на одной прямой примерно в одинаковом расстоянии (с учетом возможных ошибок). На рис. 19.8, например, видно, что в промежутке между первым и третьим моментами наблюдений (точки А\% А2, Л3) наблюдаемое судно не изменяло своих элементов движения. Если очередная нанесенная позиция наблюдаемого судна ложится в стороне от линии относительного курса (точки А4 и Л5), то при отсутствии промаха в измерениях это говорит об изменении курса и (или) скорости наблюдаемого судна. Для определения маневра, сделанного наблюдаемым судном, можно сделать следующие построения (см. рис. 19.8): 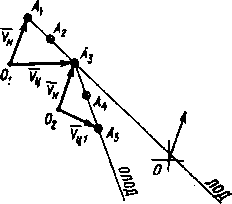 Рис. 19 8. Определение маневра цели к точке Аз проводим вектор движения (скорости FH судна-наблюдателя) ; уз Г 3 —\ 2 /
Рис. 19.7. Средняя квадратическая погрешность определения скорости цели Уц 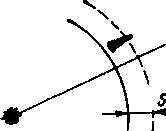 \Sn(3muh) Рис 19.10. Классификация цели вблизи курсовой черты Рис. 19.9. Глазомерная оценка обстоятельств встречи и элементов движения цели 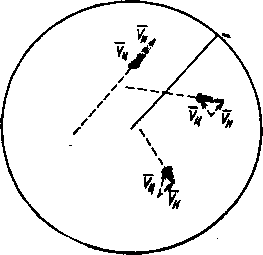 из начала 7„ (точка 02) проводим новый вектор движения (скорости Рц) наблюдаемого судна (в точку А$). из начала 7„ (точка 02) проводим новый вектор движения (скорости Рц) наблюдаемого судна (в точку А$).На рис. 19.8 вектор скорости судна-наблюдателя построен в масштабе 1 : 10 (т. е. вектор движения за б мин), интервал времени между третьим и пятым наблюдениями также 6 мин. В случае, приведенном на рис. 19.8, мы видим, что наблюдаемое судно отвернуло вправо и одновременно уменьшило скорость. Глазомерная оценка обстоятельств встречи и элементов движения цели. Обязательным этапом обработки радиолокационной информации является глазомерная оценка ситуации на экране индикатора PJ1C. Такая оценка осуществляется после обнаружения эхо-сигнала. Она предшествует радиолокационной прокладке и не прекращается до полного расхождения. При большом количестве эхо-сигналов целей глазомерная оценка ситуации позволяет отобрать для радиолокационной прокладки опасные и потенциально опасные цели. DKр и Z)nep определяются глазомерно мысленным построением Л ОД цели. Для этого необходимо продолжить за эхо-сигнал след послесвечения (рис. 19.9). На мелкомасштабной шкале, где плохо заметен след послесвечения, устанавливают на эхо-сигнале перекрестье визира и подвижного круга дальности. Спустя некоторое время, когда эхо-сигнал сойдет с перекрестья, мысленно проводят ЛОД цели через перекрестье и позицию эхо-сигнала. Для оценки примерного направления движения цели (ее ракурса) необходимо иметь навыки мысленного построения треугольников скоростей у следа послесвечения цели. На рис. 19.9 все мысленные построения показаны пунктиром. Если эхо-сигнал находится вблизи курсовой черты и след его послесвечения параллелен курсовой черте, цель легко может быть классифицирована (встречная, неподвижная или попутная) сравнением относительной скорости со скоростью судна-наблюдЬтеля. Для этого замеряют изменение расстояния до цели за 2 или 3 мин и, умножив иа 3 или 2 соответственно, получают относительное перемещение цели за 6 мин. Вычитая из полученного перемещение судна-наблюдателя за 6 мин, получают перемещение цели за 6 мин (со знаком «+»— встречное, со знаком «с—»— попутное). В условиях мостика для классификации цели пользуются следующим приемом. Замерив расстояние до цели по курсу и запустив секундомер, смещают ПКД на расстояние, проходимое судном-наблюда- гелем за 3 мин. Если через 3 мин эхо-сигнал окажется на ПКД — цель неподвижная, перейдет ПКД — встречная, не дойдет до ПКД — попутная (рис. 19.10).
Если суда не находятся на виду друг у друга при плавании в районах ограниченной видимости или вблизи таких районов, то при выборе маневра руководствуются Правилами раздела I «Плавание судов при любых условиях видимости» (Правила 4—10) и Правилом раздела III «Плавание судов при ограниченной видимости» (Правило 19). При выборе маневра необходимо учитывать то, что он не должен быть противоположным маневру, который обычно предпринимает судоводитель для расхождения с другими судами при входе в визуальный контакт. В противном случае внезапное улучшение видимости или сближение на расстояние визуального контакта может поставить судоводителя в трудное положение, поскольку как только суда, идущие в районе ограниченной видимости или вблизи него, окажутся на виду друг у друга, они должны выполнять правила раздела II. Прогнозирование последствий маневра судна-наблюдателя. Оценить последствия предполагаемого маневра своего судна можно, если по результатам наблюдений за целью имеется ее ЛОД и построен треугольник скоростей (рис. 19.11). В этом случае для определения предполагаемой дистанции расхождения после маневра судна-наблюдателя и при условии неизменности элементов движения цели необходимо выполнить следующие построения: из начала вектора V» (точка Oj) построить новый вектор судна- наблюдателя Рщ; провести новый вектор относительной скорости Ft,i из конца век тора P„i в конец вектора 7Ц; на ЛОД найти позицию, цели в момент маневра судна-наблюдателя по предполагаемому времени начала маневра и относительной скорости V* (точка Af); из точки М провести ожидаемую линию относительного движения (ОЛОД) параллельно вектору V0\; 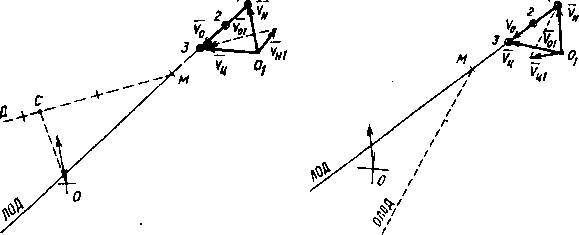 г Рис. 19.12. Прогнозирование последствий маневра цели Рис. 19.11. Прогнозирование последствий маневра судна-наблюдателя определить ожидаемую дистанцию расхождения как кратчайшее расстояние от центра планшета до ОЛОД (отрезок ОС); 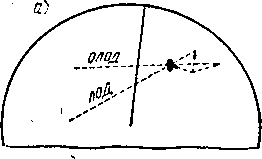 Рис. 19.13. Глазомерная оценка тенденции разворота ЛОД 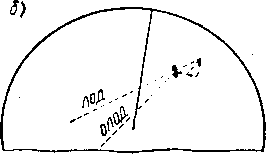 время от начала маневра до кратчайшего сближения можно оценить, откладывая по ОЛОД новую относительную скорость. время от начала маневра до кратчайшего сближения можно оценить, откладывая по ОЛОД новую относительную скорость.Следует иметь в виду, что вследствие погрешностей в относительных позициях цели направление ОЛОД и ожидаемая дистанция расхождения получены с погрешностью, величина которой может быть определена по графику на рис. 19.5. Прогнозирование последствий маневра цели. Для оценки последствий предполагаемого маневра цели необходимо из начала вектора Fu (точка Oi) построить новый вектор цели РЦ1 (рис. 19.12). Все последующие построения аналогичны построениям при прогнозировании последствий маневра судна-наблюдателя. Глазомерная оценка тенденции разворота ЛОД. Навыки мысленного построения треугольников скоростей у следа послесвечения цели позволяют оценить направление разворота ЛОД вследствие предполагаемого маневра судна-наблюдателя и (или) цели. На рис. 19.13, а по казаны пунктиром мысленные построения при предполагаемом повороте своего судна вправо (в данном случае DKP увеличится). На рис.
Как правило, тенденция разворота ЛОД оценивается в первоначальный момент маневра, т. е. при малых изменениях элементов движения судов. Например, в ситуации на рис. 19.13, б при дальнейшем уменьшении скорости цели ЛОД перейдет через центр, и Дф после этого начнет увеличиваться. Несмотря на это, следует считать, что сбавление хода целью в данном случае может ухудшить ситуацию сближения, т. о. ЛОД имеет тенденцию разворота к центру экрана. Выбор и обоснование маневра для расхождения в заданной дистанции. Если ДфСДзад, то необходимо предпринять маневр для расхождения с целью. Маневр выбирается на основании анализа ситуации в соответствии с МППСС-72 и обстоятельствами данного случая. Сначала судоводитель, глядя на вектор цели, воспроизводит в пространственном воображении существующую ситуацию ^ выбирает вид маневра (курсом или скоростью, сторону изменения курса). Сопоставляя £кр, Vo И Озад, выбирает время начала маневра. Выбираемый маневр в соответствии с требованиями Правила 8 должен приводить к расхождению на безопасном расстоянии и, если позволяют обстоятельства, быть уверенным, своевременным и соответствовать хорошей морской практике. Изменение курса или скорости должно быть достаточно большим, чтобы легко обнаруживаться другими судами. «Если имеется достаточное водное пространство, то изменение только курса может быть наиболее эффективным действием для предупреждения чрезмерного сближения при условии, что изменение сделано заблаговременно, является существенным и не вызывает чрезмерного сближения с другими судами», Правило 8(c). Еще два условия выбора маневра диктуются Правилом 19(d), (i), (ii): «...насколько это возможно, следует избегать изменения курса влево, если другое судно находится впереди траверза и не является обгоняемым; изменения курса в сторону судна, находящегося на траверзе или позади траверза». Цель ограничений, накладываемых МППСС-72 на сторону изменения курса, состоит в том, чтобы по возможности избежать несогласованных, компенсирующих друг друга маневров расходящихся судов. В конечном итоге именно эго является непосредственной причиной многих столкновений судов. Граница «на траверзе» и «впереди траверза» в Правилах четко не определена, однако в большинстве комментариев отмечается, что положение «на траверзе» включает в себя по два румба в обе стороны от курсового угла 90°. Поэтому при расхождении с целью на курсовом угле 67,5—90° правого борта (одна из пограничных ситуаций) изменение курса влево не будет нарушением Правила 19 (d). При расхождении с целью, приближающейся с кормы на |