управление судном книга. На якоре 203 Штормовые диаграммы 184186 Штормовые условия в дрейфе
 Скачать 3.93 Mb. Скачать 3.93 Mb.
|

|
Глава 2. СВЕДЕНИЯ ОБ УПРАВЛЯЕМОСТИ 2.1. Устойчивость на курсе и поворотливость 120 2.2.Движение судна под влиянием переложенного руля 124 2.3.Влияние параметров корпуса и руля на управляемость 127 2.4.Влияние боковых сил, обусловленных работой гребного винта 128 2.S. Управляемость одновинтового судна на заднем ходу 132 2.6.Управление многовинтовым судном 133 Глава 3. ИНЕРЦИОННО-ТОРМОЗНЫЕ ХАРАКТЕРИСТИКИ СУДНА 3.1. Общие сведения об инерционно-тормозных свойствах судна 134 3.2.Движение при изменениях режиме работы двигателя на переднем ходу 138 3.3. Торможение судна 32 (з!9> 35 (1+1/ГГТ)(,. у ,/7П) 36 7- _о,5, 40 4.2.Ветровой дрейф 41 ,; = 2(«° -45° + 1807ц„). (4.24) 46 4.3.Маневрирование в условиях ветра 46 Глаша 5. МАНЕВРЕННЫЕ ЭЛЕМЕНТЫ СУДНА И ИХ ОПРЕДЕЛЕНИЕ 5.1. Судовая информация о маневренных элементах 51 5.2.Определение маневренных элементов из натурных испытаний 52 5.3.Расчетное и экспериментально-расчетное определение элементов поворотливости 62 г. 64 6.1.Средства активного управлении (САУ) 73 6.3.Использование якорей при маневрировании 78 л 89 JjL Р т 104 7.4.Управление судами при буксировке 114 Глава 8. СНЯТИЕ СУДНА С МЕЛИ 8.1. Причины посадки судов на мель 118 8.2.Действия экипаже судна, севшего на мель 120 /п,(1 !-*.?,) 150 Q = ^cp F, (9.14) 157 ч 168 V -$г+‘ • 210 лгг 237 t©^'=0^>^00==£Э— 268 Курсовые углы Море Менее 5 16,4 . . . От 5 до 112,5 3,5 .. . Более 112,5 0,0 .. . С судном, стоящим на якоре 6,7 .. . В условиях ограниченной видимости происходит 46,2 % стол к.'* вений судов Минморфлота. Эти столкновения следующим образом р пределяются в зависимости от курсового угла (градусы) сближения ( от общего числа столкновений в условиях ограниченной видимост * Узкость Итого 60,0 . . . 76,4
Позднее обнаружение ...... В том числе: не обнаружены с помощью РЛС обнаружены в дистанции 0,2—1,0 мили » » » 1—3 мили Превышение скорости Пренебрежение графической прокладкой Бездействие при своевременном обнаружении Запоздалые действия Необоснованные предположения Причинами этих столкновений стали следующие нарушения Пр4 вил и ошибки судоводителей (% от общего числа столкновений): 72.9
42.9
В приводимых основных причинах столкновений сумма превышает 100 %, так как при столкновении может быть одновременно несколько основных нарушений.
Среди действий, которые должны выполнить вахтенный помощник капитана при ухудшении видимости или при подходе к зоне ограниченной видимости, одним из важнейших является организация надлежащего визуального, слухового и радиолокационного наблюдения. Визуальное и слуховое наблюдение обеспечивается выставлением в достаточно удаленном от своих ходовых огней и судового шума месте проинструктированного впередсмотрящего, имеющего надежную связь с мостиком. Надлежащее радиолокационное наблюдение является основой и главным резервом повышения безопасности расхождения судов в условиях ограниченной видимости. Как видно из приведенных выше статистических данных, в 73 % столкновений судов в условиях ограниченной видимости было запоздалое радиолокационное обнаружение или необнаружение цели по РЛС. Своевременное обнаружение цели обеспечивается правильной настройкой исправного индикатора РЛС, надлежащей организацией радиолокационного наблюдения и высокой ответственностью судоводителя за доверенные ему человеческие жизни, судно и груз. Настройка РЛС. При выведенном усилении яркость экрана делают такой, чтобы линия развертки стала слегка заметной. Вводят изображение неподвижных колец дальности и фокусировкой делают их возможно более тонкими, затем вводят усиление. Лучшее положение ручки «Усиление» такое, при котором по всей площади экрана появляется слабый мерцающий фон шумов приемника. Такое положение соответствует максимальной чувствительности приемника и позволяет обнаруживать объекты на максимальной дальности. Недостаточное усиление может привести к потере обнаружения небольших объектов, дающих слабые эхо-сигналы. Судоводители часто практикуют уменьшение усиления для выделения сильных эхо-сигналов. Делать это можно ненадолго, каждый раз восстанавливая нормальное усиление. Это же относится к периодам уменьшения усиления при просмотре части экрана, замаскированной засветкой от сильных осадков. Следует следить за яркостью изображения. Слабая яркость затрудняет наблюдение, а чрезмерная — вызывает расфокусирование изображения. При переключении шкал дальности яркость необходимо подстраивать. Уменьшение влияния помех. При наличии засветки от морских волн применяются временная автоматическая регулировка усиления (ВАРУ) или другие устройства устранения помех от волн. Область сплошной засветки уменьшают до нескольких флюктуирующих точек, на фоне которых можно выделить эхо-сигналы от объектов. Следует помнить, что одновременно с подавлением сигналов от волн подавляются и сигналы от малых объектов. Интенсивность помех от волнения уменьшается при использовании импульсов меньшей длительности, которые обычно применяются на шкалах более крупного масштаба. Поэтому бывает целесообразным переход на использование шкалы с меньшей дальностью, если при этом сокращается длительность импульса. Потеря дальности наблюдения может быть возмещена сдвигом начала развертки, если это обеспечивается РЛС. При наличии помех от осадков рекомендуется использование помехозащитного устройства при одновременном увеличении усиления. Для большего ослабления помех от осадков целесообразно использование диапазона 10 см и импульсов меньшей длительности. Ложные сигналы из-за боковых лепестков могут быть подавлены с помощью устройства «Помехи от моря». Поскольку ВАРУ подавляет и полезный эхо-сигнал, его введение должно быть, кратковременным только для опознания ложных сигналов. Действительным при многократном отражении от близких объектов является только первый эхо- сигнал. Остальное можно убрать усилением, чтобы убедиться в том, где истинные, а где ложные эхо-сигналы. Ложные сигналы исчезают сами при увеличении дистанции или вменении взаимного ракурса объектов. Ложные эхо-сигналы от берега иногда маскируют эхо-сиг- налы малых судов, находящихся в зоне помех. Поэтому необходимо внимательно следить за этой зоной, периодически уменьшая усиление приемника. Выбор режима индикации. Режим индикации выбирается исходя из конкретных условий плавания. В режиме относительного движения (ОД) наиболее наглядно и просто оценивается опасность столкновения и раньше обнаруживается изменение скорости. цЬлей, следующих пересекающимися курсами. В режиме истинного движения (ИД) раньше обнаруживаются малые неподвижные цели, нагляднее и проще выделяются цели движущиеся и неподвижные, раньше обнаруживается изменение курса встречными ‘судами. В то же время в режиме ИД сложнее оценка опасности столкновения и предполагаемой дистанции расхождения. Наиболее употребительным является режим ОД. При наличии на судне двух РЛС удобно один индикатор использовать в относительном, а другой — в истинном движении. Выбор ориентации изображения. Наибольшую точность измерения пеленга, сопоставление радиолокационной информации с картой, упрощение расчетов обеспечивает режим ориентации «Север». При работе в этом режиме следует после каждого изменения курса проверять согласование индикатора РЛС с репитером гирокомпаса. В режимах ориентации «Курс» и «Курс стабилизированный» изображение на экране РЛС соответствует карт?ше, наблюдаемой визуально с мостика. В режиме «Курс» точность радиолокационного пеленгования и, как следствие, точность оценки опасности столкновения и предполагаемой дистанции расхождения существенно уменьшаются. При изменении курса судна или значительном рыскании происходит «смазывание» радиолокационного изображения. Выбор шкал дальности. Радиолокационное наблюдение в открытом море следует вести преимущественно на шкалах среднего масштаба (8—16 миль) с периодическим просмотром окружающей обстановки на шкалах как более мелкою, так и более крупного масштаба. В стесненных водах наблюдение рекомендуется вести исходя из обстоятельств плавания на шкалах крупного масштаба с периодическим обзором на мелкомасштабных шкалах. Шкалы дальности 32 и 64 мили используются для определений места судна по высоким берегам. После обсервации необходимо сразу перейти на шкалы средней или малой дальности для продолжения наблюдения. При расхождении с целями на близких расстояниях следует использовать крупномасштабные шкалы, на которых более точно оценивается степень опасности и быстрее обнаруживаются маневры целей. Как правило, применительно к обстановке выбирается шкала, дающая разумный компромисс между наблюдением за ближними целями и достаточной дистанцией обнаружения новых целей. Совмещение этих противоположных требований может быть достигнуто применением крупномасштабной шкалы в относительном движении со смещенным центром развертки. Выполнение измерений пеленга и дистанции. Все измерения должны выполняться на одной и той же шкале дальности, одним и тем же наблюдателем и одним и тем же приемом. Сначала рекомендуется измерять пеленг, затем сразу же расстояние. Направление измеряется механическим или электронным визиром с точностью 0,5°. Линия визира должна делить отметку цели пополам. При этом точность отсчета пеленга электронным визиром не зависит от смещения центра развертки во всех режимах. Расстояние измеряется совмещением подвижного круга дальности (ПКД) с эхо-сигналом таким образом, чтобы наружный край ПКД совпал с внутренним краем отметки. При измерении расстояния электронным визиром конец визира устанавливается примерно на 0,5 мм в ближнюю к центру экрана кромку эхо-сигнала. Измерение пеленгов и дистанций может быть выполнено с помощью системы автосопровождения, данные которой обычно точнее полученных вручную. При обнаружении нескольких эхо-сигналов измерения рекомендуется выполнять в одной и той же последовательности через установленные интервалы времени и каждый цикл измерений относить к одному моменту времени, например, к моменту измерений данных первой цели. Приближенное измерение расстояний может выполняться с помощью неподвижного круга дальности (НКД) и параллельных линий механического визира. Приближенное измерение направлений выпол- Няется установкой па глаз одной из линий механического визира параллельно определяемому вектору со снятием отсчета по концу центральной линии с азимутальной шкалы. Непрерывность наблюдения. Возможность отвлечения от экрана РЛС в условиях ограниченной видимости для выполнения других обязанностей (навигационные определения, радиотелефонные переговоры и т. д.) зависит от обстановки и в самых благоприятных условиях (достаточное водное пространство, отсутствие целей вблизи судна, малая вероятность появления мелких судов), как правило, не превышает 3—£ мин. Суда с плохой отражающей способностью обнаруживаются на небольших расстояниях и, очевидно, даже кратковременные отвлечения от экрана РЛС могут привести к тому, что такие суда не будут своевременно обнаружены. В районах с интенсивным движением, а также при плавании вблизи берегов, где возможна встреча судов и объектов с малой отражающей способностью, с целью обеспечения непрерывного радиолокационного наблюдения, как правило, ходовая вахта усиливается и обязанности распределяются между двумя судоводителями. Наличие теневых секторов, особенно впереди траверза, превращает даже непрерывное наблюдение в периодическое (в этих секторах) и требует регулярных отворотов для просмотра теневых секторов. Следует помнить, что причиной возникновения теневого сектора может быть находящееся поблизости крупнотоннажное судно (см. рис. 18.2). Ограничения, свойственные радиолокационной информации. Следу* ет принимать во внимание, что даже самое современное радиолокационное оборудование не может полностью заменить визуальное наблюдение. Основным ограничением при использовании РЛС является задержка информации, т. е. наличие значительного интервала времени (1—3 мин) между изменением ситуации вследствие маневра цели и обнаружением этого изменения оператором судовой РЛС. Кроме того, вследствие радиолокационных помех, волнения моря, метеорологических аномалий, малой отражающей поверхности некоторых судов и объектов отдельные цели могут быть вообще не обнаружены или не обнаружены своевременно. В результате -выполнения радиолокационных наблюдений определяется только наличие цели и ее местоположение, что является неполной радиолокационной информацией. Для получения полной информации необходимо произвести ее обработку. Целью обработки информации является получение полных и точных данных о наличии ситуации столкновения или чрезмерного сближения и степени ее опасности, об элементах движения целей, определение необходимости маневра и его выполнение. Обработка радиолокационной информации начинается с момента обнаружения цели на экране РЛС и заканчивается после полного расхождения с ней.
Критерии опасности. Если судно-наблюдатель или цель, или то и другое вместе будут двигаться, эхо-сигнал будет перемещаться на экране индикатора, оставляя за собой слабый светящийся след послесвечения — «хвоег». Перемещение эхо-сигнала на экране индикатора относительного движения является результатом взаимного перемещения двух объектов: судна-наблюдателя и цели. Линия перемещения эхо- сигнала называется линией относительного движения (ЛОД). Обнаружив присутствие другого судна только с помощью РЛС, наблюдатель должен прежде всего определить, развивается ли ситуация чрезмерного сближения и (или) существует ли опасность столкновения. Если ЛОД проходит через начало развертки или вблизи него, то опасность столкновения существует. Критериями опасности столкновения судов являются основные обстоятельства встречи — расстояние кратчайшего сближения судов DKP и время от последнего момента наблюдений до момента кратчайшего сближения tKP. Ситуация чрезмерного сближения существует при DKP<D3ад. Чем меньше Ькр и р, тем больше степень опасности столкновения. В некоторых случаях определяются дополнительные обстоятельства встречи — дистанция пересечения курса £>ПеР, время до пересечения курса /пер, относительный курс /Со и относительная скорость V0. Если существует опасность столкновения и (или) чрезмерного сближения, то необходимо своевременно предпринять надлежащие действия для расхождения на безопасном расстоянии. Для принятия правильного решения важно знать элементы движения других судов; т. е. их курсы и скорости. Обстоятельства встречи и элементы движения судов опытным наблюдателем могут быть оценены ориентировочно по послесвечению, наблюдаемому на экране индикатора. Более точно обстоятельства встречи и элементы движения судов определяются графической прокладкой. Различают прокладку истинную и относительную. Если на экране индикатора обнаружены эхо-сигналы нескольких судов, то на основании глазомерной оценки ситуации выбирают для прокладки опасные и потенциально опасные цели. Потенциально опасными называют цели, которые в данный момент не опасны, но могут стать опасными при предполагаемом маневре нашего судна или вероятном маневре цели. Истинная прокладка. Такая прокладка может быть выполнена непосредственно на крупномасштабной путевой навигационной карте или листе бумаги. Сущность способа состоит в следующем. Обнаружив на экране индикатора эхо-сигнал другого судна, определяют его пеленг П1 и расстояние Db пускают секундомер, замечают судовое время Тj, курс своего судна Кн и отсчет лага оль По пеленгу и расстоянию наносят местоположение эхо-сигнала А\ относительно своего местоположения, предварительно выбрав желаемый масштаб (рис. 19.1). Через определенный промежуток времени (для расчетов удобен интервал в
По расстоянию между точками А\ и А2 и по времени Т\ и Т2 можно определить скорость цели Уц и рассчитать, когда и на каком расстоянии она пересечет линию курса нашего судна ГПер и Dnep. Для определения расстояния кратчайшего сближения DKP и времени до него /Кр из точки А2 откладывают в сторону, противоположную своему курсу, плавание судна за время между первым и вторым наблюдениями v42F=0i02. Отрезок О\С, проведенный перпендикулярно к линии, проходящей через точки А\ и F\ будет расстоянием кратчайшего сближения. Местоположение судов в момент кратчайшего сближения (точки 04 и А4) можно найти параллельным перемещением 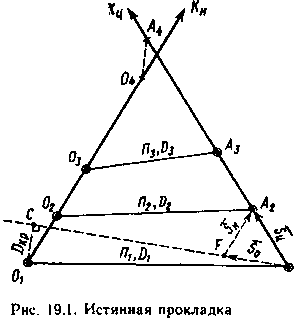 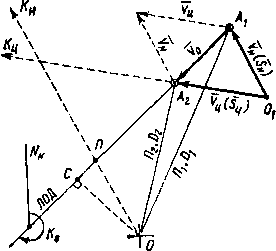 Рис. 19.2. Относительней прокладка отрезка OiС в положение О4С4. Время сближения на кратчайшее расстояние: OfO* |