Навигация по странице:/Сн2
|
управление судном книга. На якоре 203 Штормовые диаграммы 184186 Штормовые условия в дрейфе
2
ОIскин ОА - 2R-OB ^3,0—0,7-2,3 мили.
1 I 12-}-15 ^—
{ОА — ADa— AD3— AD4) ----- 1 ° °
4(2.3_J2±!L3-o.4_o..)
\ 60 !
В первом приближении, довольно близком к действительности, можно принять, что^тормозной путь судна пропорционален квадрату его начальной скорости, т. е.“ = W* Отсюда Vhi-12 «5,3 уз.В этих условиях безопасная скорость Уя*5,3 уз.5,3+15 1Тогда ОЛ—2-0,22+ —gg—3+0,4+0,1 *1,9 мили; ОБ» (15—5,3) -gg (0,3-4 + 3) +0,4++0,1 —1,2 мили.Построив окружность /)аад, получаем: а) 1,9 мили; б) 1,5 мили; в) 1,5 мили; г) 1,2 мили.Рассчитанные значения Озад являются ориентировочными, поскольку учитывают не все факторы, влияющие на ее величину. Так, например, если радиолокационное наблюдение вблизи судна (1-нЗ мили) затруднено или невозможно из-за помех от морского волнения, дистанция расхождения должна по возможности быть больше зоны помех.На величину безопасной скорости также влияет целый ряд факторов, не учитываемых в примере 6 (см. Правило 6). В частности, наличие впереди траверза зоны, в которой затруднено или невозможно своевременное обнаружение целей (зона дождя, теневые секторы от деталей своего судна или от близко идущих судов-сателлитов и т.д.), может потребовать существенного снижения скорости судна.Контрольные вопросы. 1. Какие разделы правил плавания и маневрирования МППСС*72 действуют при ограниченной видимости? 2. Какие ограничения свойственны радиолокационной информации? 3. Каким образом осуществляется прогнозирование последствий маневра своего судна и (или) цели? 4. Приведите примеры ситуаций, когда потенциально опасное судно повлияло на величину маневра, на вид маневра и на время начала маневра. 5. Какими способами может учитываться инерция судна при расхождении изменением скорости? 6. Каковы особенности решения задачи расхождения судов по данным РЛС при плавании в системе разделения движения или при пересечении полосы движения?Глава 20. ИСПОЛЬЗОВАНИЕ СРЕДСТВ АВТОМАТИЧЕСКОЙ РАДИОЛОКАЦИОННОЙ ПРОКЛАДКИ (САРП)
Роль и место САРП в решении задач расхождения судов
Последовательность действий судоводителя при решении задачи расхождения в общем случае может быть разделена на следующие этапы:
своевременное обнаружение эхо-сигнала;
определение его относительной позиции (снятие отсчетов пеленгов и дистанций через определенные интервалы времени);
оценка степени опасности сближения (определение 0Кр и ^кр);
определение курса и скорости цели, обнаружение изменений в ее элементах движения;
принятие решения о необходимости маневрирования;
определение необходимых изменений курса и (или) скорости для расхождения с опасной целью в заданной (выбранной) дистанции;
оценка последствий предполагаемого маневра своего судна на расхождение с другими судами (учет потенциально опасных судов);
оценка навигационной безопасности предполагаемого маневра;
принятие решения на маневр с учетом пп. 6, 7, 8 в соответствии с МППСС-72, обычной морской практикой и обстоятельствами данною случая;
осуществление маневра;
контроль за эффективностью предпринятых действий;
оценка последствий предполагаемого манепра своего судна по возвращению к прежним элементам движения;
осуществление маневра по возвращению к прежним элементам движения;
контроль за безопасностью расхождения после возвращения к прежним элементам движения.
При наличии на судне САРП только часть из перечисленных этапов может быть полностью или частично возложена на САРП.Автоматически, т. е. без участия оператора, выполняются пп. 2, 3,
САРП самостоятельно получает необходимую информацию, обрабатывает ее, представляя оператору данные о пеленге и дистанции до цели, ее курсе и скорости, дистанции кратчайшего сближения и времени до него.
Автоматизированно, т. е. с участием оператора, выполняются пп. 1, б, 7, 8, 11, 12, 14. При установке оператором режима автоматического захвата п. 1 может выполняться САРП автоматически. Однако вследствие свойственных САРП ограничений полностью полагаться на САРП на этом, наиболее важном этапе нельзя. При выполнении пп. 6,
8, 12 САРП производит расчет последствий предполагаемых изменений курса и (или) скорости, задаваемых оператором. При выполнении пп. 11 и 14 САРП вычисляет параметры расхождения после изменения элементов движения своего судна, а оператор сопоставляет фактическое развитие ситуации с планировавшимся.
Таким образом, САРП не подменяет собой человека, а лишь освобождает его от выполнения утомительных и требующих времени вычислений, оставляя за судоводителем анализ ситуации, выбор маневра (пп. 5, 9) и его осуществление (пп. 10, 13).САРП оказывают существенную помощь судоводителям в решении задач расхождения судов, способствуют повышению безопасности судовождения в случае грамотного их использования. При неграмотном использовании, чрезмерном доверии к САРП без учета их особенностей и ограничений, пренебрежении мерами предосторожности, требуемыми хорошей морской практикой, САРП может стать источником повышения опасности столкновения. Это проявляется в существующих случаях столкновений судов, одно из которых или оба были оборудованы САРП. В частности, одной из причин столкновения парохода «Адмирал Нахимов» с теплоходом «Петр Васев» было чрезмерное доверие к САРП и пренебрежение необходимыми мерами предосторожности капитаном теплохода «Петр Васев».Сама по себе установка САРП на судне не обеспечивает предупреждения столкновений. Эту задачу решает судоводитель, хорошо знающий особенности использования САРП. Поэтому в дополнение к требованиям подготовки судоводителей по использованию радиолокационного оборудования ИМО предъявляет требования к обучению практическому использованию САРП. Все судоводители, несущие вахту на судне, оборудованном САРП, должны пройти официально утвержденный курс обучения по их использованию и иметь соответствующее квалификационное удостоверение. Это требование распространяет- ся на все суда, оборудованные САРП, независимо от того, подпадает ли это судно под требования ИМО к обязательной установке САРП.
Виды САРП
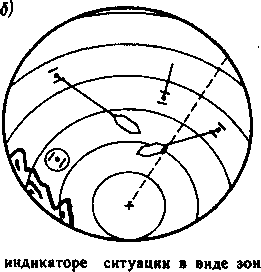
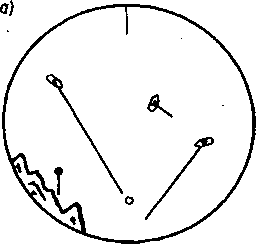
В зависимости от характера представления информации на индикаторе ситуации САРП делятся на два основных вида: с представлением информации в виде зон опасности и с векторным представлением информации.САРП первого вида изображают на экране индикатора ситуации предсказанные зоны опасности,* построение которых производится следующим образом (рис. 20.1). По параметрам относительного движения и введенным данным о курсе и скорости судна-наблюдателя вычисляются курс и скорость цели. В дальнейшем в зависимости от относительной позиции цели определяются опасная ЛОД (на рис. 20.1 ЛОД0, курс судна-наблюдателя, который может привести к столкновению, и предполагаемая точка столкновения на линии курса цели. В зависимости от заданной оператором безопасной дистанции расхождения определяются безопасные ЛОД, касательные к £зад; курсы судна-наблюдателя /Сн2 и /Снз. приводящие к расхождению на Оэад и точки Р2 и Р3 пересечения судном-наблюдателем линии курса цели по носу и по корме у нее при безопасных ЛОД. Параллельно линии курса цели в обе стороны от нее проводятся линии в расстоянии £>3«д. В полученную фигуру вписывается эллипс или шестиугольник, представляющие район опасности. На экране индикатора (рис. 20.2) отображаются сопровождаемые цели (две черточки у эхо-сигнала — строб сопровождаемой цели), линии их курсов и предсказанные районы опасности. Если курсовая черта своего судна пересекает предсказанный район опасности, значит DKP<cD3tA. Для избежания чрезмерного сближения надо вывести курсовую черту своего судна из районов опасности. Этот вид представления информации запатентован и используется в САРП фирмы «Сперри».На судах Минморфлота САРП фирмы «Сперри» можно встретить очень редко. Однако в некоторых отечественных САРП имеется дополнительный режим секторов опасных курсов. В этом режиме на периферии индикатора САРП с векторным представлением информации дополнительно рисуются дуги, соответствущие секторам, в которых есть районы опасности (районы опасности на экране не показываются). Этот режим используется как вспомогательный. Чрезмерное доверие к нему и маневрирование только на основании секторов опасных курсов могут быть опасными.Наиболее широко распространены САРП второго вида. На рис. 20.3 показан индикатор ситуации САРП с векторным представлением информации в режимах индикации ЛОД и линий истинного движения (ЛИД) в одной и той же ситуации. На экране отображаются символы сопровождаемых целей (в данном случае в виде корабликов, ориентированных по курсам целей), а также по усмотрению оператора векторы относительного или истинного движения за время прогноза, устанавливаемое оператором. Конец каждого вектора показывает позицию цели в относительном или истинном движении через интервал времени, равный заданному времени прогноза. К данному виду САРП относятся устанавливаемые на судах Минморфлота отечественные
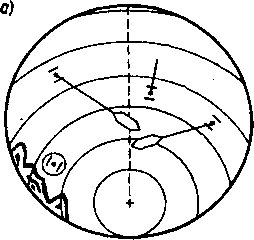 опасности: опасности:
 а — до маневра своего судна; б — после маневра своего судна для расхождения на безопасной дистанции а — до маневра своего судна; б — после маневра своего судна для расхождения на безопасной дистанции
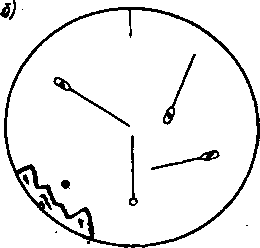
Рис. 20.3. Векторное представление информации на индикаторе ситуации* а
в режиме индикации ЛОД; б — в режиме индикации ЛИД
САРП «Бриз», «Бриз-Е», «Океан-С», а также импортные «Дата Бридж» фирмы «Норконтрол» совместно с фирмой «Кельвин Хьюз», САРП фирм «Ракал-Декка», «Крупп-Атлас», «Селениа» и др.
Захват целей
Ручной захват. Захват целей в САР11 может осуществляться автоматически или вручную (автоматическая и ручная селекции целей). В САРП с автозахватом целей должен быть предусмотрен режим ручного захвата и сброса целей. Для ручного захвата необходимо подвести к эхо-сигналу координатный маркер так, чтобы эхо-сигнал оказался в пределах строба, и нажать кнопку ввода. После этого у наблюдаемой цели появляется символ того» что цель взята на автосопровождение, и координатный маркер может быть убран. Аналогично, чтобы прекратить сопровождение цели, не представляющей интереса, и освободить соответствующий канал сопровождения надо подвести к цели координатный маркер и нажать кнопку сброса. Если цель наблюдается неуверенно (более т пропусков за п оборотов антенны), го она на сопровождение взята не будет. Это может происходить, например, если плохо отрегулировано радиолокационное изображение. Захват цели не будет произведен также при отсутствии свободного канала сопровождения. В этом случае необходимо сбросить одну из сопровождаемых целей и повторить захват интересующей судоводителя цели. Если несколько целей наблюдаются на одном пеленге, то захват очередной цели может быть произведен только после выработки данных по предыдущей захваченной цели, что приводит к'существенной задержке в получении информации о движении всех целей. Достоинством ручного захвата является избирательность информации, так как сопровождаются и отображаются на экране индикатора только те цели, которые действительно необходимы. В этом режиме исключается захват ложных эхо-сигналов, помех, поэтому в условиях большого количества помех он предпочтительнее.
Недостатком ручного захвата является необходимость затрат времени оператора на захват и сброс целей, и следовательно, неизбежное отвлечение оператора от анализа обстановки и принятия решений на выполнение чисто механических операций.
Надо отметить также, что оператор не всегда может достоверно опознать, какие цели представляют интерес, а какие нет. Может получиться так, что при плавании в недостаточно знакомом районе оператор использует все имеющиеся каналы сопровождения на детали берега (скалы, островки), стоящие на якоре или неопасные суда и к моменту появления действительно нужной цели (например, выходу парома из порта) не будет иметь свободного канала. Потребуется время выбрать наименее интересную из сопровождаемых ц^лей, снять ее с сопровождения и только после этого произвести захват новой цели. Для избежания подобных ситуаций на судах, использующих САРП с ручным захватом, при подходе к проливу, узкости, порту отбор целей для захвата производят по хвостам послесвечения на экране индикатора РЛС.
Оператор отбрасывает неподвижные цели, послесвечение которых параллельно курсу судна, и берет на сопровождение цели, ЛОДы которых направлены к центру экрана.
Так как в режиме ручного захвата обнаружение целей и взятие их на сопровождение осуществляются оператором, отвлечение его от индикатора ситуации на выполнение других штурманских обязанностей может привести к запоздалому обнаружению целей и соответственно, к запоздалому получению информации о степени опасности и элементах движения. Для дублирования оператора, особенно в период его отвлечения, могут быть использованы охранные кольца или зоны. Например, оператор устанавливает охранное кольцо на расстоянии 10 миль. При пересечении целью охранного кольца раздается сигнал тревоги, извещающий оператора о появлении цели. Получив такое извещение, оператор производит захват цели. Если такое охранное кольцо установлено на достаточном удалении, то будет резерв времени на захват цели, получение информации о ней, выбор и осуществление маневра, но малые суда с плохой отражающей способностью могут появляться впервые внутри кольца и их появление не будет отмечено сигналом тревоги. Поэтому, как правило, используют 2 кольца — одно на фиксированной дистанции и второе на переменной, выбираемой оператором. Следует подчеркнуть, что поскольку появляющиеся внутри кольца цели не отмечаются системой предупредительной сигнализации, такую систему нельзя рассматривать как вариант равноценного систематического наблюдения. В зависимости от района плавания и ситуации необходимо обеспечить или минимальное отвлечение оператора от САРП, или непрерывное наблюдение, усилив своевременно ходовую вахту.
Автозахват. В этом режиме каждая вновь появляющаяся цель автоматически захватывается и берется на сопровождение. Достоинствами автоматического захвата являются освобождение оператора от часто повторяющихся механических операций по вводу и сбросу целей, а также более быстрое получение информации о цели после ее появления (так как захват производится сразу после появления цели).
Автозахват может осуществляться при пересечении целью охранного кольца («на кольце») или во всей зоне обзора («по полю»). При использовании автозахвата «на кольце» имеется большая вероятность появления целей внутри кольца и, следовательно, пропуска целей. Все ограничения, свойственные использованию охранных колец и рассмотренные ранее, полностью относятся к автозахвату «на кольце». Автозахват «по полю» имеет существенно меньшую вероятность пропуска целей.
Недостатком работы в режиме автозахвата является избыток информации на экране индикатора ситуации, где наблюдается больше векторов, чем это необходимо в конкретной ситуации. При интенсивном движении возможно переполнение каналов сопровождения, когда общее количество целей превышает количество сопровождаемых. В этом случае могут возникать сомнения в приоритете сопровождаемых целей — наряду с сопровождаемыми не представляющими интерес целями могут оказаться не захваченными цели, представляющие интерес, но находящиеся, например, в большей дистанции от своего судна.
При плавании вблизи берегов непротяженные детали берега классифицируются, как точечные цели и «забивают» каналы сопровождения и экран индикатора ситуации. Применение автозахвата предъявляет повышенные требования к помехозащищенности САРП, поскольку помехи могут также «забивать» каналы сопровождения и вносить дезинформацию на экран индикатора ситуации в виде хаотично появляющихся и исчезающих целей с изменяющимися элементами движения и степенью опасности.
С целью компенсации указанных недостатков в различных САРГ1 принимаются (частично или в полном объеме) следующие меры.
На экран индикатора ситуации подаются векторы не всех сопровождаемых целей, а только части из них. При этом, как правило, используется следующая система приоритетов:
а) в первую очередь индицируются цели, имеющие DKP<,Dmm и *кр<С*т |
|
|
 Скачать 3.93 Mb.
Скачать 3.93 Mb.