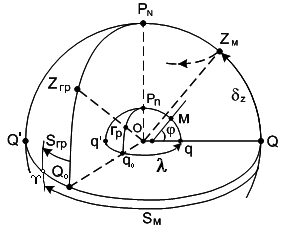
Астрономия шпоры. Небесная сфера. Отвесная линия. Ось мира. Меридиан наблюдателя. Система сферических координат и полярных координат
 Скачать 1.04 Mb. Скачать 1.04 Mb.
|

2.5.5. Измерение высот светилИзмерение высот светил является трудоемкой операцией, которую можно условно разделить на три этапа: приведение светила к горизонту, отыскание вертикала светила; совмещение края Солнца или центра звезды с видимым горизонтом. Эти этапы могут выполняться различными способами, методика которых подробно рассмотрены в литературе [1, 3, 4]. Освоение процесса измерения высот светил достигается только длительной тренировкой. Такую тренировку лучше выполнять при стоянке в порту или на якорной стоянке, где есть открытый видимый горизонт. 24. 25 .Опр попр компаса ОПРЕДЕЛЕНИЕ ПОПРАВКИ КОМПАСА Основы астрономического определения поправки компаса Единственным способом определения поправки компаса К в открытом море является астрономический. Кроме того этот способ обеспечивает наибольшую точность получения К при условии использования точных координат судна, например при стоянке в порту. К = ИПсв – КПсв (98) В отличии от навигационных способов истинный пеленг на светило вычисляется как азимуту светила в круговом счете при решении параллактического треугольника. В зависимости от заданных аргументов в настоящее время используют три метода вычисления азимута на светило (см. разд. 1.2.1.). Метод моментов. В этом методе заданы аргументы м, св и tсвм, т. е. А = f(, , t) и азимут вычисляется по формуле (4) ctgA =tg cosφ cosectм – sinφ ctgtм (99) Этот метод универсален – его применяют при любых условиях и он является основой общего способа определения поправки компаса. Метод высот. В этом методе заданы аргументы м, св и hсв т. е. А= f(, , t) и азимут вычисляется по формуле (5) (100) Этот метод применяется в основном в частых случаях, когда известна высота светила, например при восходе (заходе) Солнца. Метод высот и моментов. В этом методе заданы аргументы м, hсв и tсвм т. е. А= f(, h, t) и азимут вычисляется по формуле (6) sinA = sin costм sесh (101) Этот метод применяется при одновременном определении места судна (при измерении высот) и поправки компаса, а так же в частном случае при определении К по Полярной звезде. Постоянная поправка гирокомпаса определяется как средняя по серии отдельных (мгновенных) поправок по формуле где ГКi = ИПсвi – ГКПсвi – мгновенная поправка гирокомпаса; N – число поправок. Влияние погрешности в счислимых координатах судна на истинный пеленг светила Так как в формулах (99101) в основном используются счислимые координаты судна – с и с, то и азимут светила получают счислимый Ас, а не истинный Аи. Другими словами, погрешности в координатах судна и трансформируются в погрешности в азимуте по широте и долготе, которые можно представить в виде ряда Продифференцировав формулу (99) по λ и и выполнив ее преобразование, получим формулу расчета значения поправки А А = tgh sinA (104) Формула (27) изменения азимута светила в суточном движении получена в разд. 1.3.2. в виде At = –( sinφ – tgh cosA cosφ) t. Так как tм = tгр и значение tгр безошибочно (связано только с моментом измерения), то t = . Другими словами, погрешность в часовом угле светила вызывается погрешностью в счислимой долготе. После замены переменной получим формулу расчета A A = Для анализа погрешности А в счислимом азимуте выразим и в формулах (104, 105) через невязку С (снос) и направление невязки Ссн и после преобразований получим следующую формулу А = А + А = Сtgh sinA cosCсн – C (sin – cos tgh cosA) sinСсн sec. Основными аргументами влияющих на величину А являются значения невязки С и высоты светила h. Вычисления по этой формуле при невязке С 10 миль и высоте светила h 18° дали следующие результаты: в малых широтах А 0,1°; в широтах до 60° А 0,25°; в широтах до 70° 75° А 0,4°. На основе приведенного анализа получим следующие выводы:
Частные способы определения поправки компаса Частные способы упрощают получение истинного пеленга на светило. Эти способы применимы только для Солнца в момент видимого восхода (захода) и Полярной звезды. Примечание. Применение общего способа определения К в этих случаях дает более точный результат особенно для Солнца. Поправка компаса по азимуту видимого восхода (захода) Солнца. Явление видимого восхода (захода) Солнца рассмотрено в разделе 1.6.4.
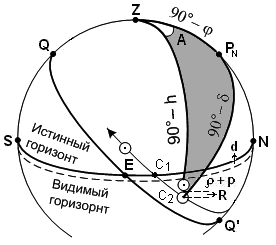
Высоту центра Солнца в момент видимого восхода (захода) (рис. 53) получим по формуле (54) h= – d– +p – R, где где d– наклонение видимого горизонта; – астрономическая рефракция; р – параллакс Солнца; R – видимый радиус Солнца. Азимут видимого восхода (захода) Солнца получим по аргументам , и h параллактического ZPNC2 по формуле (100) метода высот, полученной в разделе 3.1.1. По этой формуле вычислены азимуты (в круговом счете), приведенные в ежедневных таблицах МАЕ на каждую дату года. Аргумент высоты Солнца h= –50,3 = const. с учетом высоты глаза наблюдателя е = 0 метров (d = 0), стандартной астрономической рефракции и параллакса ( + p = –34,3), радиуса Солнца (R = –16). Аргумент Солнца вычислен на момент восхода (захода) каждых суток на Гринвичском меридиане. Аргумент широты места задан в виде табличных широт от 74°N до 60°S. Таким образом, получение азимута выполняется по дате и координате широты места судна по формуле Ас = Ат + А + А, (106) где А – интерполяция по широте места; А – интерполяция по долготе места. Действительная высота отличается от табличной (h= –50,3) за счет наклонения видимого горизонта d и поправок высоты за температуру и давления атмосферы, которые выбираются из таблиц исправления высот (разд. 2.5.1.), на величину hд hд = d + ht + hB (107) Дополнительная поправка азимута Ад вычисляется по формуле Ад = –0,0017 tg hд cosecA (108) Достоинством этого способа простота и скорость вычисления Ас, а так же процесс измерения пеленга не отличается от навигационных измерений. Недостатками являются:
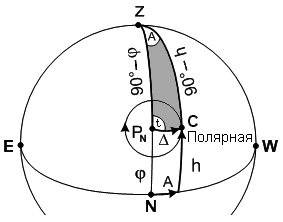
Поправка компаса по Полярной звезде. Движение Полярной звезды происходит по суточной параллели с радиусом равным полярному расстоянию 43 (рис. 54).
sinA = sin sintм sесh и учитывая, что tм = Sм + и небольшие значения элементов A и равны их синусам, а так же примем = h получим расчетную формулу азимута Полярной звезды A = sec sin(Sм +) (109) По этой формуле, принимая средние значения за год и , вычислена таблица в МАЕ «Азимут Полярной» с точностью до 1. Аргументами для входа в таблицу являются широта места и звездное местное время Sм. К достоинствами этого способа следует отнести:
Недостатком является практическое ограничение применения способа по широте места от 10°N до 35°N. Пеленгование светил. Точность поправки компаса Выполнение пеленгования. Для пеленгования подбирают светила с наименьшей высотой (см. разд. 3.1.2.) в пределах до 35° при прямовидимом пеленговании и наименьшей скорости изменения азимута, т. е. около I-го вертикала (см. выводы изменения азимута в разд. 1.3.2.)
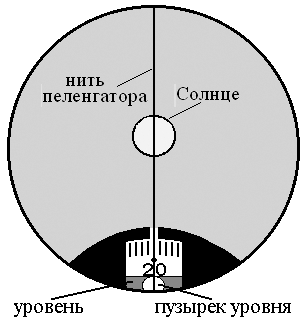
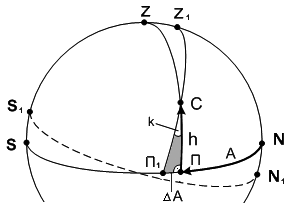
Снятие ГКП и момента Т производят после нескольких «прицеливаний», пока не получится устойчивый результат или выполняют три измерения ГКП и Т с последующим их осреднением. Процесс одновременного совмещения светила и пузырька уровня требует большой тренировки на ходу судна и особенно при качке. Погрешность компасного пеленга. Погрешность в ГКП складывается из погрешностей гирокомпаса и погрешностей измерения пеленга. Погрешность измерения пеленга возникает в основном от наклона плоскости пеленгования к истинному горизонту (рис. 56).
А = k tgh (110) При удержании пеленгатора в вертикале светила по уровню на ходу судна k 0,5° и при высотах до 20° погрешность оценивается величиной mКП = 0,3° [2]. Погрешность гирокомпаса (центральный прибор + репитер) в среднем принимается равной mГК=0,5° [2]. Погрешность ГКП относительно истинного меридиана mГКП = 0,6°. Если полученная на ходу судна К = 0,5°, то ее принимают равной 0°. 26.27. Основы астр ОМС. Задача определения места сводится к определению положения зенита относительно мест светил (ориентиров) на небесной сфере с переходом обратно на поверхность Земли. Примечание. Решение задачи непосредственно на поверхности Земли (геоиде) значительно сложнее по сравнению с решением на сфере. Связь места судна и положением его зенита. Географические координаты и точки М и небесные координаты его зенита z и t связаны соотношениями вытекающими из рис. 57.
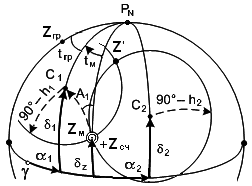
Sм – Sгр или на основании основной формулы времени как tсвм – tсвгр, т. е.  (111) = z; = Sм – Sгр = tсвм – tсвгр. Вследствие суточного вращения сферы место зенита непрерывно перемещается по параллели, поэтому по формулам (111) получаем мгновенное место на момент Тгр измерения высоты. Принципы определения места зенита. Для определения мгновенного места зенита (места судна) необходимо иметь данные измерений о его расположении относительно мест двух светил (рис. 58). В навигации, измеряемые физические величины U, являющиеся функциями координат и , называются навигационными параметрами [5]. Для светил может быть 8 таких параметров, однако в настоящее время на транспортном флоте применяется только параметр высоты. Весь процесс измерений и их обработки называют астрономической обсервацией. Обработка наблюдений, т. е. определение обсервованного места, может выполняться различными методами [1, 2]. В настоящее время в основном используется графоаналитический метод (метод линий положения см. разд. 3.2.3.). Графический метод, основанный на принципе навигационных изолиний, позволяет пояснить принцип и особенности астрономической обсервации.
Последовательность выполнения решения обсервации по измерениям высот двух светил следующая:
Кроме рассмотренных методов при решении астрономических задач на компьютере используется итерационный обобщенный метод наименьших квадратов, рассмотренный в курсе «Математические основы судовождения» [5]. Астрономические изолинии. Круг равных высот Навигационные параметры U на сфере, земном геоиде и карте представлены в виде изолиний, т. е. геометрическим местом точек равных значений навигационного параметра. Каждая изолиния описывается своим уравнением U = f(, ). В таблице 2 приведены 3 из 8 изолиний. Таблиц 2
Фундаментальное отличие астрономических изолиний от земных изолиний заключается в том, что навигационные ориентиры (светила) находятся на небесной сфере и их координаты непрерывно изменяются вследствие суточного вращения Земли (по времени). Координаты земных ориентиров не изменяются. Рассмотрим подробно изолинию высоты. |